TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071973
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2023182433
出願日
2023-10-24
発明の名称
エンコーダ速度監視装置
出願人
オークマ株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G01D
5/245 20060101AFI20250430BHJP(測定;試験)
要約
【課題】速度異常を正確に検知可能な速度監視装置を提供する。
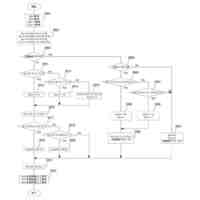
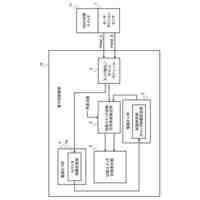
【解決手段】回転速度監視装置は、Z相信号でカウンタクリアする第2カウント値C2を出力する第2MCU4bを備える。前記第2MCU4bは、前記A相信号と前記B相信号を計数しベースカウントCb値として出力する位相計数カウンタ6bと、前記ベースカウントCb値をキャプチャ周期Tsでラッチし、位置カウント値Cpとして出力する第1キャプチャ回路7bと、前記ベースカウント値Cbを前記Z相信号のアクティブエッジでラッチし、基準カウント値Czとして出力する第2キャプチャ回路7cと、前記位置カウント値Cpと前記基準カウント値Czとに基づいて前記第2カウント値C2を算出する第2カウンタ演算部9と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
対象物の回転速度を監視する回転速度監視装置であって、
1回転当たりNパルスのA相信号と、前記A相信号に対して90度位相が異なるB相信号と、1回転あたり1パルスのZ相信号と、を出力するエンコーダと、
前記A相信号と前記B相信号とに基づき4逓倍の位相計数により第1カウント値を出力する第1ユニットと、
前記A相信号と前記B相信号に基づく4逓倍の位相計数により得られるカウント値を前記Z相信号に基づいてカウンタクリアすることで得られる一回転内カウント値と、前記Z相信号を回転方向に応じてカウントアップまたはカウントダウンすることで得られる多回転カウント値と、で構成する第2カウント値を算出する第2ユニットと、
前記第1カウント値の変化量に基づいて第1監視速度を算出し、前記第2カウント値の変化量に基づいて第2監視速度を算出し、前記第1監視速度および前記第2監視速度との比較結果に基づいて速度異常の有無を判定する安全コントローラと、
を備え、
前記第2ユニットは、
前記A相信号と前記B相信号と、を4逓倍で位相計数し、ベースカウント値として出力する位相計数カウンタと、
前記ベースカウント値を、速度監視周期を正の整数で除算した値であるキャプチャ周期でラッチし、位置カウント値として出力する第1キャプチャ回路と、
前記ベースカウント値を前記Z相信号のアクティブエッジでラッチし、基準カウント値として出力する第2キャプチャ回路と、
前記位置カウント値と前記基準カウント値とに基づいて前記第2カウント値を算出する第2カウンタ演算部と、
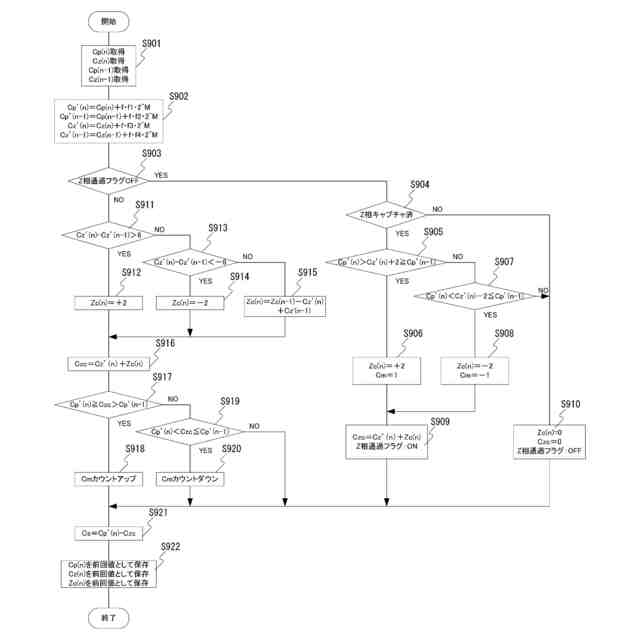
を備え、前記第2カウンタ演算部は、
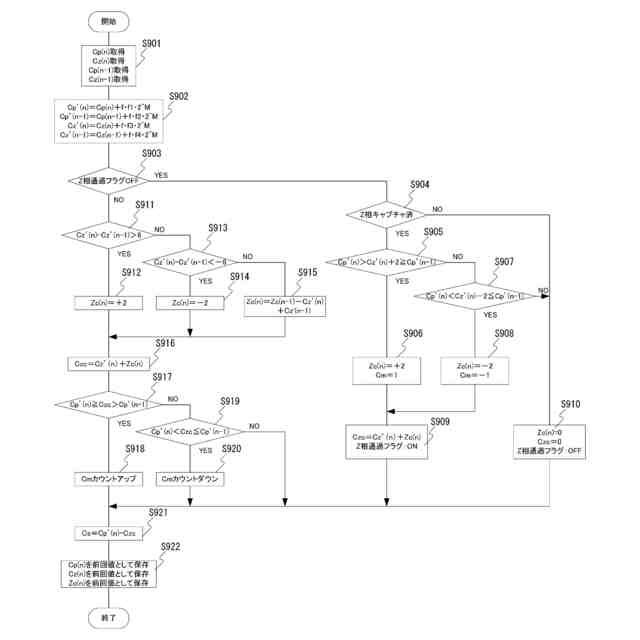
前記Z相信号の基準位置における前記ベースカウント値と前記基準カウント値との差分に相当する基準カウント補正値を、前記基準カウント値の今回値と、前記基準カウント値の前回値と、前記基準カウント補正値の前回値と、に基づいて算出し、
前記基準カウント値に前記基準カウント補正値を加算して基準カウント推定値を算出し、
前記位置カウント値の今回値と、前記位置カウント値の前回値と、前記基準カウント推定値と、の大小関係に基づき、前記多回転カウント値をカウントアップまたはカウントダウンし、
前記位置カウント値と前記基準カウント推定値との差分値を前記一回転内カウント値として算出する、
ことを特徴とする、速度監視装置。
続きを表示(約 730 文字)
【請求項2】
請求項1に記載の速度監視装置であって、
前記第2カウンタ演算部は、
前記基準カウント値の今回値と、前記基準カウント値の前回値と、のオーバーフローおよびアンダーフローを考慮した差分値を算出し、
前記差分値が前記Z相信号のパルス幅相当のカウント値を超える場合に、前記基準カウント補正値を+2とし、
前記差分値が前記Z相信号のパルス幅相当のカウント値の反数を下回る場合に、前記基準カウント補正値を-2とし、
それ以外の場合に、前記基準カウント補正値の前回値から、前記基準カウント値の今回値と前記基準カウント値の前回値との差分値を、減算した値に前記基準カウント補正値を設定する、
ことを特徴とする速度監視装置。
【請求項3】
請求項1または2に記載の速度監視装置であって、
前記第2カウンタ演算部は、
前記基準カウント値の初回値を取得した後、第一条件および第二条件のいずれか一方を満たすまで、前記基準カウント補正値および前記多回転カウント値をいずれも0に設定し、前記第一条件を満たす場合、前記基準カウント補正値を+2に設定し、前記多回転カウント値を+1に設定し、前記第二条件を満たす場合、前記基準カウント補正値を-2に設定し、前記多回転カウント値を-1に設定し、
前記基準カウント値をCz(n)、前記位置カウント値の今回値をCp(n)、前記位置カウント値の前回値をCp(n-1)とした場合、前記第一条件は、Cz(n-1)≦Cz(n)+2<Cz(n)であり、前記第二条件は、Cz(n-1)≧Cz(n)-2>Cz(n)である、
ことを特徴とする、速度監視装置。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、回転角度に応じて位相差のある信号を出力するエンコーダを用いた速度監視装置を開示する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
工作機械の主軸については、国際規格によって速度制限監視機能が要求されている。例えば、旋盤の主軸については、ISO23125により安全カテゴリ3で速度制限監視を実現することが要求されている。
【0003】
一般的に工作機械の主軸用の速度検出器としては、磁気式エンコーダなどのように、回転角度に応じて、1回転あたりN波数で90度の位相差があるcos信号、sin信号などを出力するタイプが使用される(以下、「エンコーダ」と呼称する)。通常、この信号は、A相信号、B相信号と呼称される。
【0004】
このエンコーダを用いて速度監視を行う場合、通常、A相信号とB相信号の位相差に基づき4逓倍のパルスカウントを行う位相差カウンタのカウント値を用いて、速度監視周期間のカウント値の差分を利用する。即ち、速度監視を行う安全コントローラは、位相差カウンタのカウント値を監視周期T毎にサンプリングし、今回のカウント値をP(n)、前回のカウント値をP(n-1)とした場合、監視速度VをV=(P(n)-P(n-1))/(T×4×N)として演算する。そのため、位相差カウンタを用いて、正しく速度監視を行うには、位相差カウンタに設定される一回転波数Nと、実際のエンコーダの一回転波数Nが一致する必要がある。安全コントローラによる位相差カウンタのサンプリングは、例えば、プロトコルにより通信データの信頼性が担保された安全通信などで行われる。
【0005】
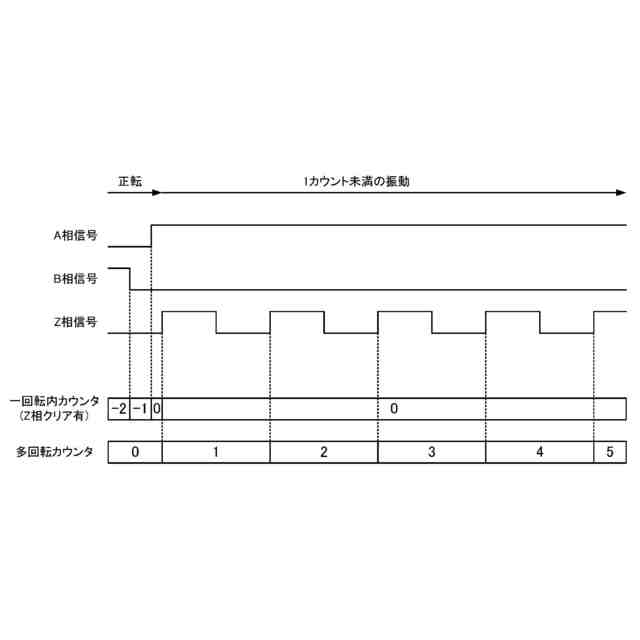
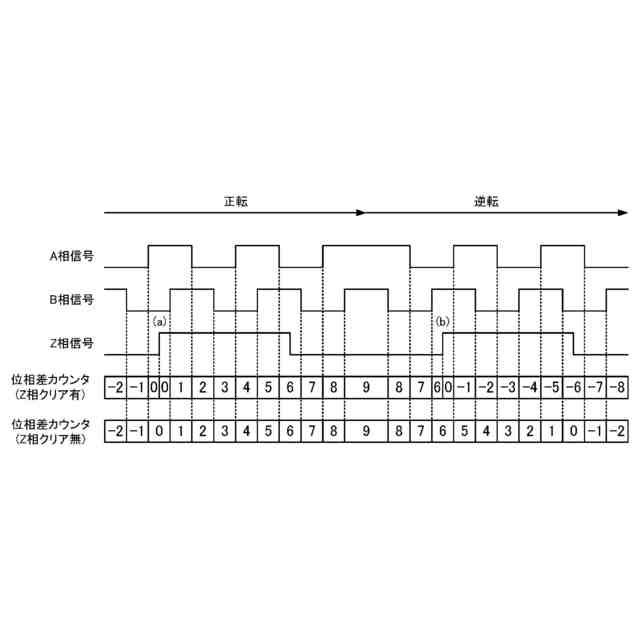
さらに、このエンコーダを用いて、速度監視を安全カテゴリ3で実現するためには、異なる素子による2つの位相差カウンタを用いて、それぞれで計算した速度(パルスカウントの差分)を比較して相互監視をする必要がある。また、通常、エンコーダは1回転内の位置を特定するため、Z相信号と呼ばれる1回転あたり1パルスを出力するマーカ信号を備えている。さらに、位相差カウンタの1つを、Z相信号でクリアをする1回転内カウンタと、Z相信号のカウントアップ、カウントダウンを行う多回転カウンタと、の組合せで構成する。
【0006】
そして、Z相信号を用いる前記1回転内カウンタと前記多回転カウンタとを組合せた位相差カウンタに基づく速度と、Z相信号を用いない位相差カウンタに基づく速度と、をそれぞれ演算し、得られた二種類の速度を比較することで、エンコーダの一回転波数が正しいかを確認できる。
【0007】
Z相信号を用いたカウンタは、例えば、非特許文献1に開示されている。非特許文献1には、Z相信号の立ち上がりエッジによって、一回転内のカウンタをクリアし、直前の一回転内カウンタのカウントアップ、カウントダウンの方向により、多回転カウンタをカウントアップ、カウントダウンする機能を搭載したマイクロコントローラユニット(以下、「MCU」と呼称する)が開示されている。
【0008】
また、特許文献1では、Z相信号のエッジではなく、Z相信号の論理レベルとA相信号、B相信号の立ち上がりエッジまたは立ち下がりエッジに基づき、一回転内カウンタのカウンタクリアと多回転カウンタのカウントアップ、カウントダウンを実現する方法が開示されている。
【先行技術文献】
【特許文献】
【0009】
特開2009-153335号公報
【非特許文献】
【0010】
” 32-Bit Microcontroller FM0+ Family Peripheral Manual Timer Part”, Cypress Semiconductor Corporation, September 9, 2020
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オークマ株式会社
配置特定装置
2日前
オークマ株式会社
エンコーダ速度監視装置
6日前
オークマ株式会社
工具ホルダの位置決め機構
15日前
オークマ株式会社
加工異常検知方法及び加工異常検知装置
6日前
オークマ株式会社
情報処理装置、プログラム、および面粗度の算出方法
2日前
オークマ株式会社
工作機械における振動特性推定システム、工作機械及び振動特性推定方法
今日
日本精機株式会社
表示装置
1日前
株式会社エビス
水準器
今日
日本碍子株式会社
ガスセンサ
今日
株式会社不二越
X線測定装置
1日前
株式会社不二越
X線測定装置
1日前
TDK株式会社
計測装置
1日前
エスペック株式会社
温度槽及び試験方法
2日前
Astemo株式会社
電子制御装置
3日前
アークレイ株式会社
分析装置
1日前
東洋紡株式会社
測定試料希釈液および免疫測定キット
3日前
株式会社ナガセインテグレックス
水準器
今日
キーコム株式会社
レーダテストシステム
今日
株式会社日立ハイテクサイエンス
X線分析装置
3日前
横河電機株式会社
試料容器保持装置
2日前
株式会社イシダ
X線検査装置
今日
日本特殊陶業株式会社
センサ素子及びガスセンサ
3日前
株式会社イシダ
X線検査装置
今日
株式会社デンソーウェーブ
三次元計測装置
今日
アークレイ株式会社
試験紙撮像装置
1日前
アークレイ株式会社
尿検査装置
1日前
横河電機株式会社
試料容器保持装置
2日前
ライフトレック株式会社
検査用具及び検査キット
1日前
矢崎エナジーシステム株式会社
呼気測定装置
2日前
株式会社レゾナック
検出装置および磁気センサ
3日前
株式会社レゾナック
検出装置および磁気センサ
今日
株式会社クボタ
土壌分析の前処理装置
今日
株式会社クボタ
土壌分析の前処理装置
今日
個人
力センサ及び測定方法
1日前
株式会社クボタ
土壌分析の前処理装置
今日
株式会社クボタ
土壌分析の前処理装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ