TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085445
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199327
出願日
2023-11-24
発明の名称
グリップ
出願人
三井化学ファイン株式会社
代理人
弁理士法人鷲田国際特許事務所
主分類
B25G
1/01 20060101AFI20250529BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】使用性を向上できるグリップを提供する。
【解決手段】グリップは、変形可能な把持部を備えるグリップであって、把持部は、昇温速度4℃/min、周波数1.59Hz、歪量0.1%の条件での動的粘弾性測定により求められる、損失正接(tanδ)の極大値を示す温度が少なくとも10℃以上100℃以下の範囲に1つ以上あり、且つ、損失正接の極大値が0.5以上3.5以下である樹脂部材により構成されている。
【選択図】図3A
特許請求の範囲
【請求項1】
変形可能な把持部を備えるグリップであって、
前記把持部は、昇温速度4℃/min、周波数1.59Hz、歪量0.1%の条件での動的粘弾性測定により求められる、損失正接(tanδ)の極大値を示す温度が少なくとも10℃以上100℃以下の範囲に1つ以上あり、且つ、前記損失正接の極大値が0.5以上3.5以下である樹脂部材により構成されている、
グリップ。
続きを表示(約 670 文字)
【請求項2】
前記把持部は、中空状である、
請求項1に記載のグリップ。
【請求項3】
前記把持部は、4-メチル-1-ペンテン系重合体により構成され、
前記4-メチル-1-ペンテン系重合体は、4-メチル-1-ペンテン由来の構成単位と炭素原子数2~3の直鎖状α-オレフィン由来の構成単位とを含んでいる、
請求項1に記載のグリップ。
【請求項4】
前記4-メチル-1-ペンテン系重合体は、発泡体である、
請求項3に記載のグリップ。
【請求項5】
前記把持部の内面と空間を介して対面する支柱部を、更に備える、
請求項1に記載のグリップ。
【請求項6】
前記把持部の内側に配置された充填部材を、更に備える、
請求項1に記載のグリップ。
【請求項7】
前記把持部は、多層構造を有する、
請求項1に記載のグリップ。
【請求項8】
前記把持部は、4-メチル-1-ペンテン系重合体以外で構成された少なくとも一つの層を有する、
請求項7に記載のグリップ。
【請求項9】
前記把持部は、層状に巻かれた1枚のシート状の樹脂部材により構成されている、
請求項7に記載のグリップ。
【請求項10】
4-メチル-1-ペンテン系重合体以外で構成され、前記把持部の外面を覆う表面部材を、更に含む、
請求項7に記載のグリップ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、グリップに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、使用時にユーザにより把持されるグリップを有する種々のデバイスが知られている。具体的には、特許文献1には、位置を調整可能に構成されたグリップを備えた電動工具が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-98819号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述のような特許文献1に開示された電動工具に限らず、グリップを備えた種々のデバイスにおいて、グリップは、使用性の観点から、ユーザの手にフィットすると好ましい。
【0005】
本発明の目的は、使用性を向上できるグリップを提供することである。
【課題を解決するための手段】
【0006】
本発明に係るグリップの一態様は、
変形可能な把持部を備えるグリップであって、
把持部は、昇温速度4℃/min、周波数1.59Hz、歪量0.1%の条件での動的粘弾性測定により求められる、損失正接(tanδ)の極大値を示す温度が少なくとも10℃以上100℃以下の範囲に1つ以上あり、且つ、損失正接の極大値が0.5以上3.5以下である樹脂部材により構成されている。
【発明の効果】
【0007】
本発明によれば、使用性を向上できるグリップを提供できる。
【図面の簡単な説明】
【0008】
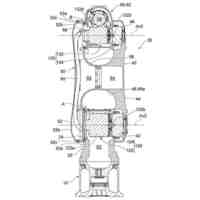
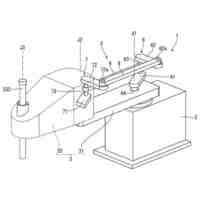
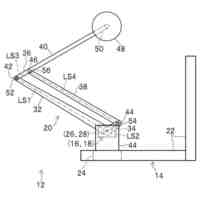
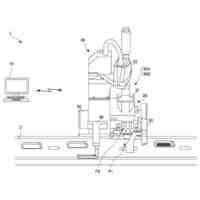
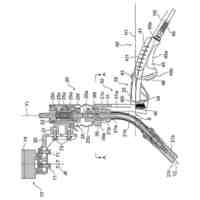
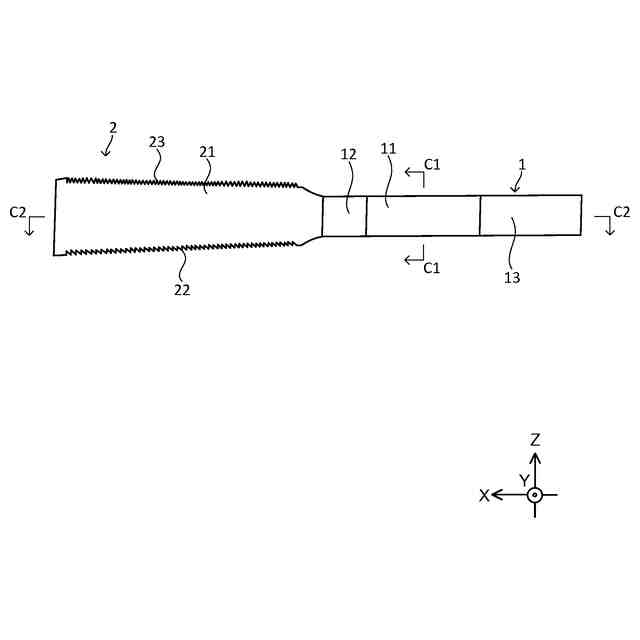
図1は、本発明の実施形態に係るグリップを備えたデバイスの斜視図である。
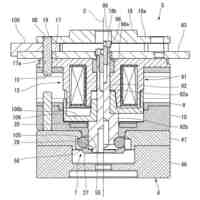
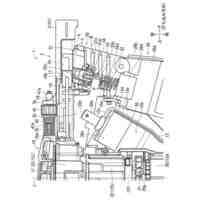
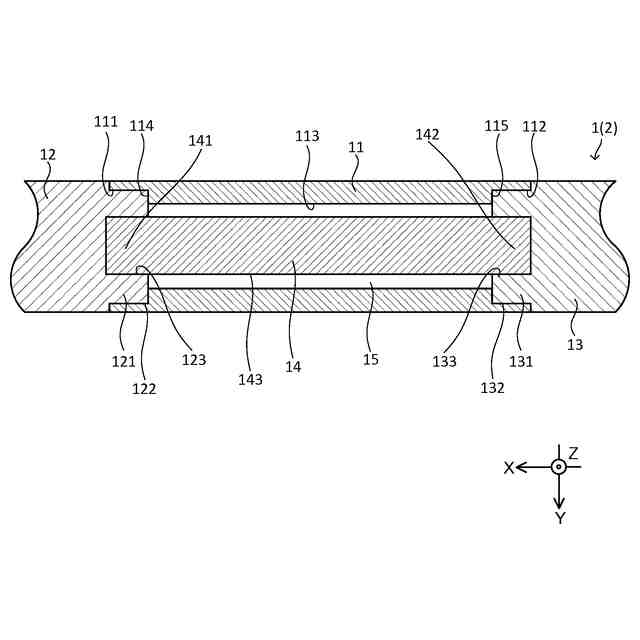
図2は、図1に示す工具を図1のC1-C1線で切断した場合のグリップの断面図である。
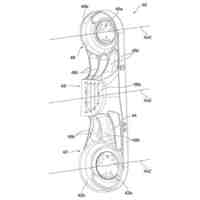
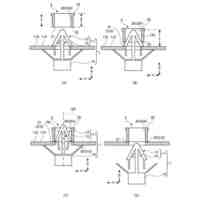
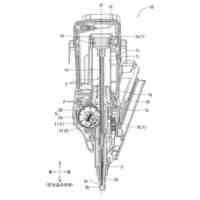
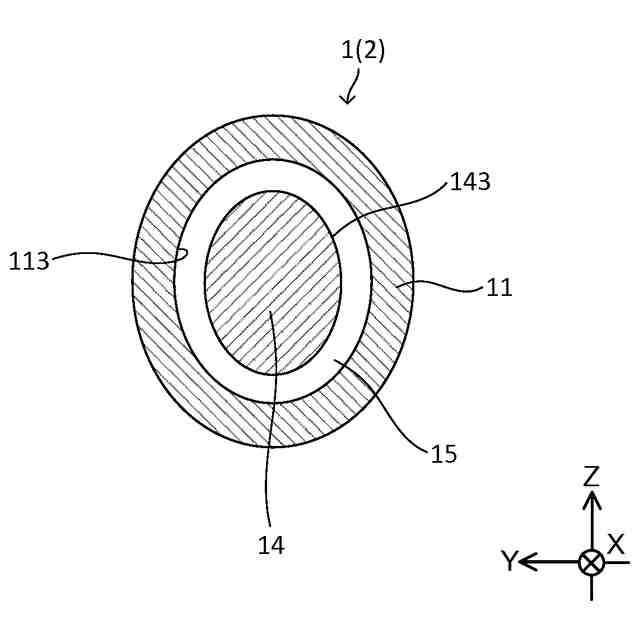
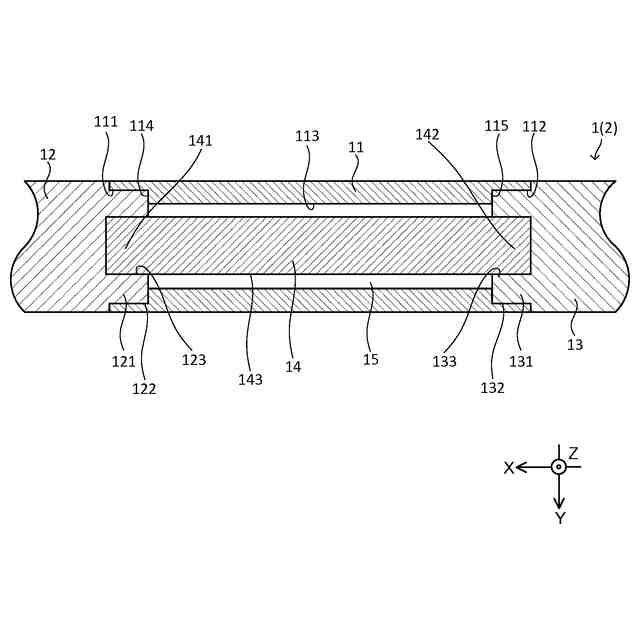
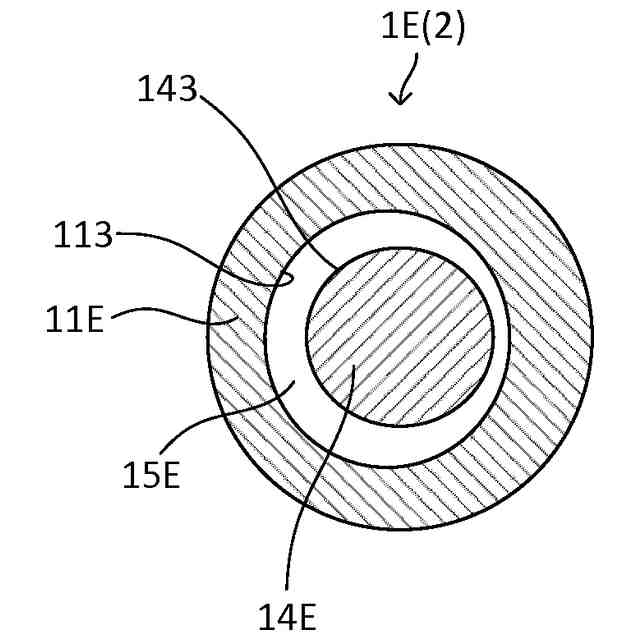
図3Aは、図1に示す工具を図1のC2-C2線で切断した場合のグリップの断面図である。
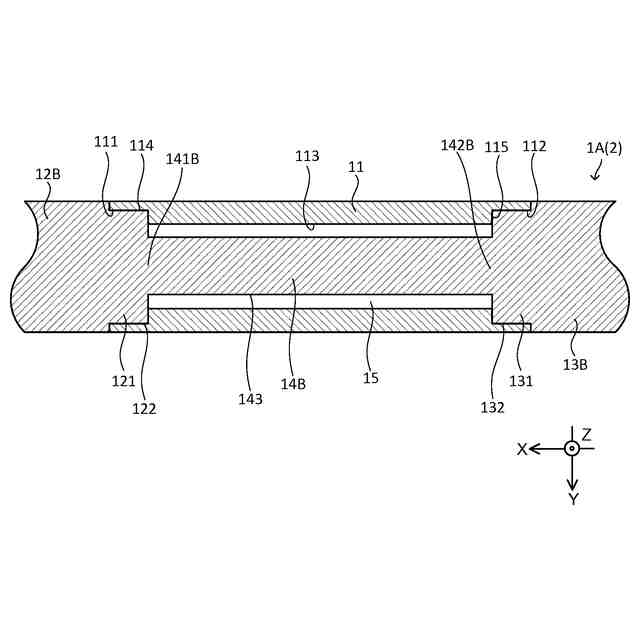
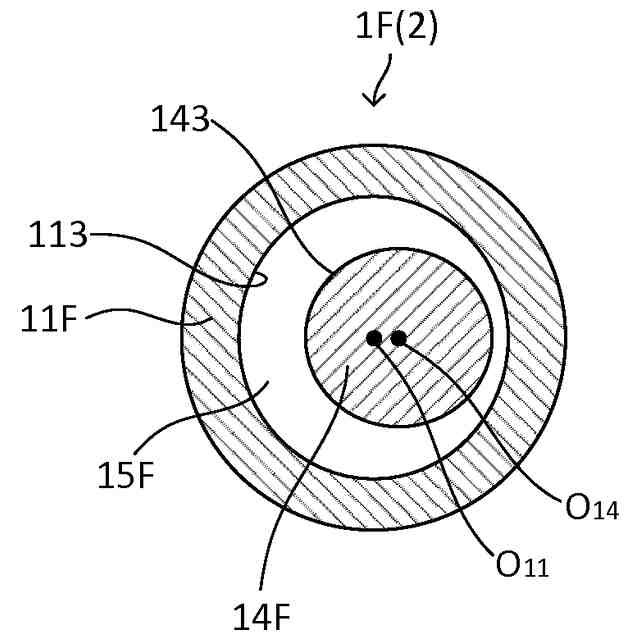
図3Bは、変形例の一例に係るグリップの断面図である。
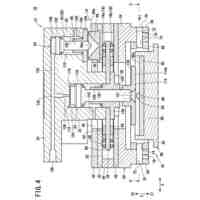
図4は、本発明の実施形態2に係るグリップの断面図である。
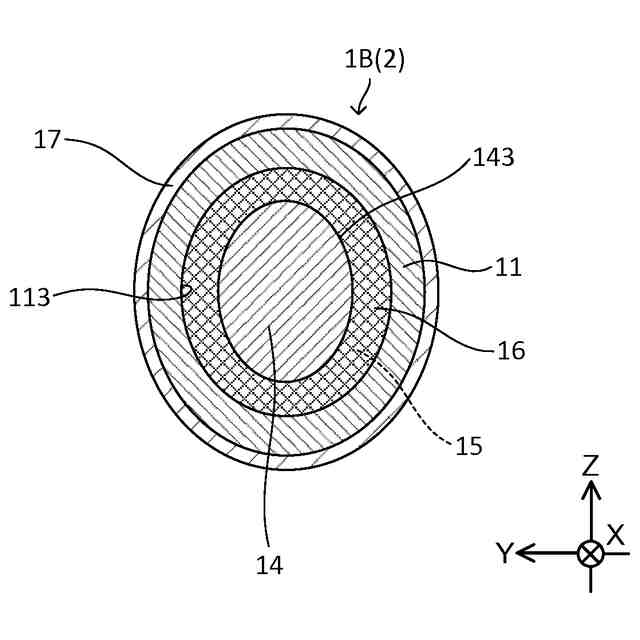
図5は、本発明の実施形態3に係るグリップの断面図である。
図6は、本発明の実施形態4に係るグリップの断面図である。
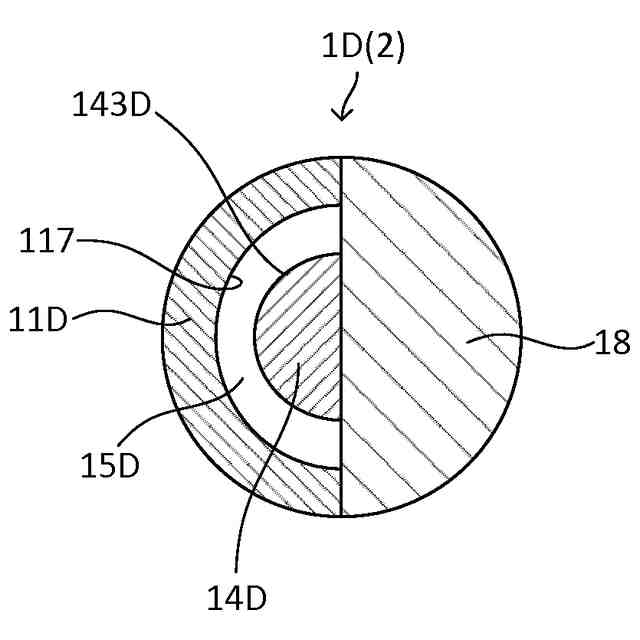
図7は、本発明の実施形態5に係るグリップの断面図である。
図8は、本発明の実施形態5に係るグリップの断面図である。
図9は、本発明の実施形態5に係るグリップの断面図である。
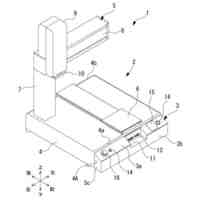
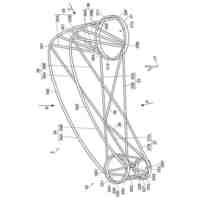
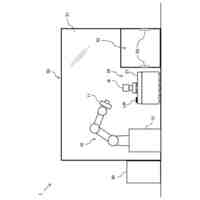
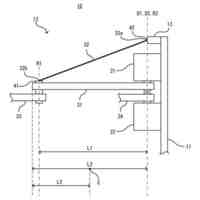
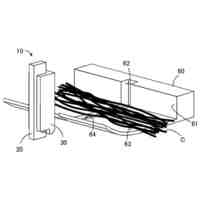
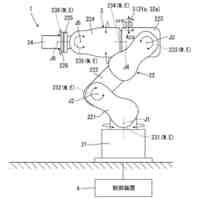
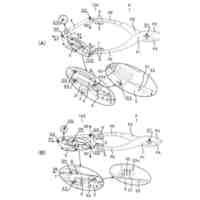
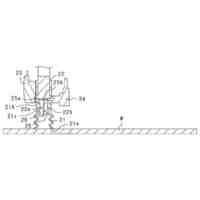
図10aは、本発明に係るグリップを適用できるデバイスの一例を示す図である。
図10bは、本発明に係るグリップを適用できるデバイスの一例を示す図である。
図10cは、本発明に係るグリップを適用できるデバイスの一例を示す図である。
図10dは、本発明に係るグリップを適用できるデバイスの一例を示す図である。
図10eは、本発明に係るグリップを適用できるデバイスの一例を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明に係るグリップについて、図面に基づいて詳細に説明する。尚、以下で説明するグリップは、本発明に係るグリップの一例であり、本発明は後述の実施形態により限定されない。
【0010】
[実施形態1]
図1~図3Aを参照して、本発明の実施形態1に係るグリップ1について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
22日前
株式会社スター精機
吸着パッド
21日前
工機ホールディングス株式会社
作業機
13日前
工機ホールディングス株式会社
作業機
13日前
工機ホールディングス株式会社
作業機
13日前
株式会社スター精機
吸着パッド
21日前
株式会社スター精機
産業用ロボット
19日前
オークラ輸送機株式会社
ハンド装置
6日前
川崎重工業株式会社
ロボットシステム
7日前
株式会社安川電機
ロボット
19日前
株式会社安川電機
ロボット
19日前
株式会社安川電機
ロボット
19日前
株式会社ジャノメ
ロボット
15日前
セイコーエプソン株式会社
ロボット
21日前
セイコーエプソン株式会社
ロボット
1日前
小倉クラッチ株式会社
ロボット用ツール交換装置
21日前
株式会社マキタ
電動工具
5日前
株式会社マキタ
回転工具
8日前
SMC株式会社
コンプライアンスユニット
12日前
個人
工具、工具セット、部材取外し方法
1日前
オムロン株式会社
ロボット
18日前
オムロン株式会社
撮影システム
21日前
オムロン株式会社
ロボット
18日前
株式会社デンソーウェーブ
産業用ロボット及び吸着装置
21日前
コネクテッドロボティクス株式会社
処理システム
22日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
打ち込み工具
21日前
倉敷紡績株式会社
線状物取上ハンドおよび線状物取上方法
19日前
株式会社ダイヘン
溶接ロボット
22日前
セイコーエプソン株式会社
ロボットシステム
15日前
株式会社サンテクノ
プライヤー工具に用いる物品取付構造体
12日前
株式会社スター精機
吸着パッド、及びワーク搬送装置
21日前
三井化学ファイン株式会社
グリップ
19日前
久維科技(蘇州)有限公司
緊固件打ち込み機
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ