TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025115807
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024010460
出願日
2024-01-26
発明の名称
無線給電システム、無線給電装置及び無線給電方法
出願人
河村電器産業株式会社
,
学校法人 名城大学
代理人
個人
,
個人
主分類
H02J
50/30 20160101AFI20250731BHJP(電力の発電,変換,配電)
要約
【課題】移動体に適切に光を照射することができる無線給電システム、無線給電装置及び無線給電方法を提供する。
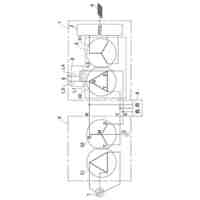
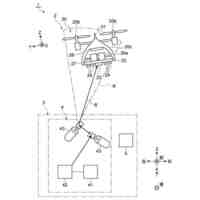
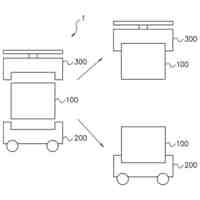
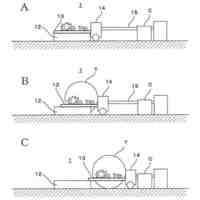
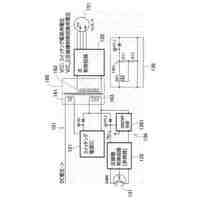
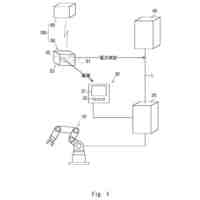
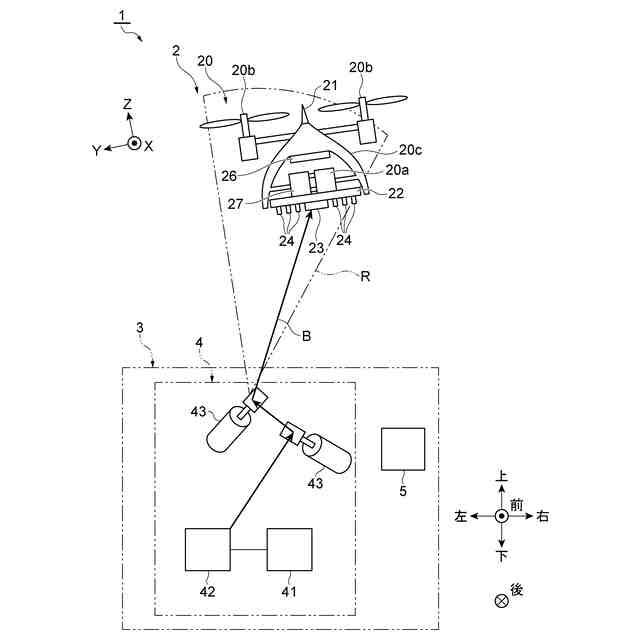
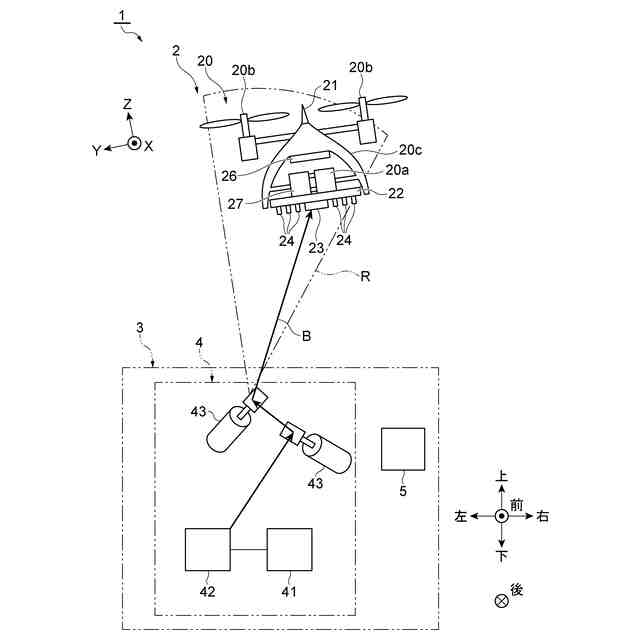
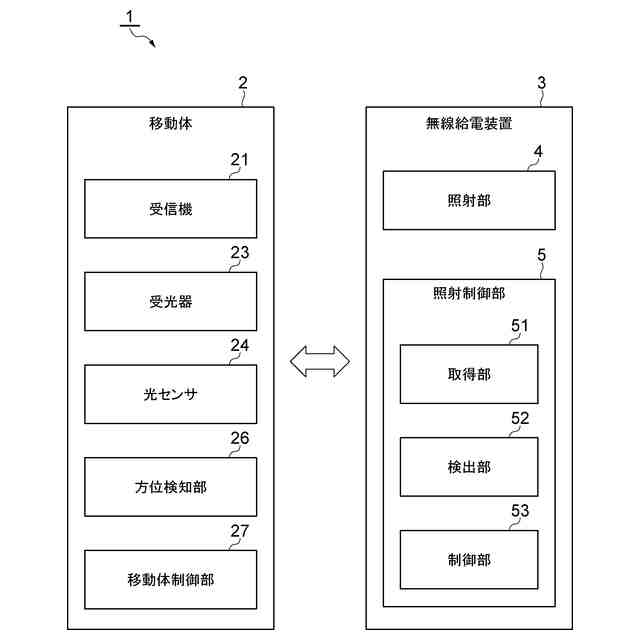
【解決手段】無線給電システム1は、光を照射する照射部4と、照射部から光が照射された場合に光の受光に関する第1信号を出力可能な受光器23と、受光器を囲むように配置され、光の受光に関する第2信号を出力可能な複数の光センサ24及び位置情報サービスによる信号を受信可能な受信機21を有する移動体2と、受信機の受信結果に基づいて移動体の位置情報を取得する取得部と、第1信号、第2信号及び位置情報の少なくとも1つに基づいて、移動体に対する光の照射位置を検出する検出部と、照射位置に基づいて、照射部における移動体に対する光の照射及び移動体の移動の少なくとも一方を制御する照射制御部5と、を備え、移動体は、受光器に受光された照射部からの光に基づいて充電される。
【選択図】図1
特許請求の範囲
【請求項1】
光を照射する照射部と、
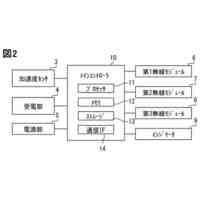
前記照射部から光が照射された場合に前記光の受光に関する第1信号を出力可能な受光器と、前記受光器を囲むように配置され、前記光の受光に関する第2信号を出力可能な複数の光センサと、位置情報サービスによる信号を受信可能な受信機とを有する移動体と、
前記受信機の受信結果に基づいて前記移動体の位置情報を取得する取得部と、
前記第1信号、前記第2信号及び前記位置情報の少なくとも1つに基づいて、前記移動体に対する光の照射位置を検出する検出部と、
前記照射位置に基づいて、前記照射部における前記移動体に対する前記光の照射及び前記移動体の移動の少なくとも一方を制御する照射制御部と、
を備え、
前記移動体は、前記受光器に受光された前記照射部からの前記光に基づいて充電される、
無線給電システム。
続きを表示(約 1,600 文字)
【請求項2】
前記照射制御部は、前記位置情報に基づいて前記移動体を前記照射部によって光を照射可能な範囲内に移動させる、請求項1に記載の無線給電システム。
【請求項3】
前記受信機は、衛星測位システムによる複数の衛星からの信号を受信し、
前記取得部は、前記受信機の前記衛星測位システムによる受信結果に基づいて、前記移動体の位置情報を取得する、請求項1又は2に記載の無線給電システム。
【請求項4】
前記受光器と、前記複数の光センサのうち当該受光器から最も離れている前記光センサとの距離は、少なくとも前記衛星測位システムにおける最小誤差より大きい、請求項3に記載の無線給電システム。
【請求項5】
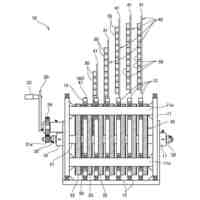
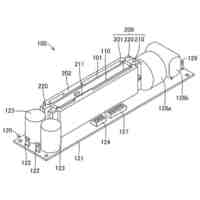
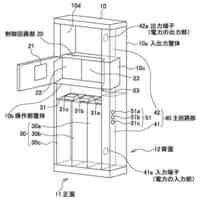
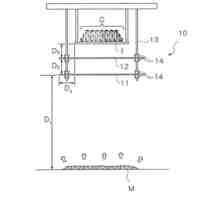
前記移動体は、3以上の領域に区分されており、前記3以上の領域のそれぞれに前記複数の光センサが配置されている台座を更に有し、
前記複数の光センサは、前記台座の領域毎に直列接続されている、請求項1又は2に記載の無線給電システム。
【請求項6】
前記移動体は、前記受光器を中心として径方向に予め定められた距離でそれぞれ配置されている枠状の複数の導線を更に有し、
複数の導線のそれぞれに複数の光センサが接続されている、請求項1又は2に記載の無線給電システム。
【請求項7】
前記複数の光センサの間の距離は、前記照射部からの前記光のビーム径より小さい、請求項1又は2に記載の無線給電システム。
【請求項8】
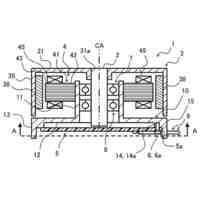
前記受光器は、当該受光器の中心部から4以上の領域に分割されており、前記4以上の領域のそれぞれに配置され、光電変換機能を有する4つ以上の素子を有し、
前記4つ以上の素子は、前記光の受光に関する第1信号をそれぞれ出力し、
前記検出部は、前記4つ以上の素子のそれぞれの第1信号に基づいて前記受光器に対する光の照射位置を検出する、請求項1又は2に記載の無線給電システム。
【請求項9】
光を照射する照射部と、
位置情報サービスによる信号を受信可能な移動体の受信機の受信結果に基づいて前記移動体の位置情報を取得する取得部と、
前記照射部から光が照射された場合に前記移動体の受光器から出力される前記光の受光に関する第1信号、前記受光器を囲むように配置された前記移動体の複数の光センサから出力される前記光の受光に関する第2信号、及び前記位置情報の少なくとも1つに基づいて、前記移動体の検出位置を検出する検出部と、
前記移動体の前記検出位置に基づいて、前記移動体に対する前記照射部による光の照射及び前記移動体の移動の少なくとも一方を制御する照射制御部と、
を備え、
前記移動体は、前記受光器に受光された前記照射部からの前記光に基づいて充電される、
無線給電装置。
【請求項10】
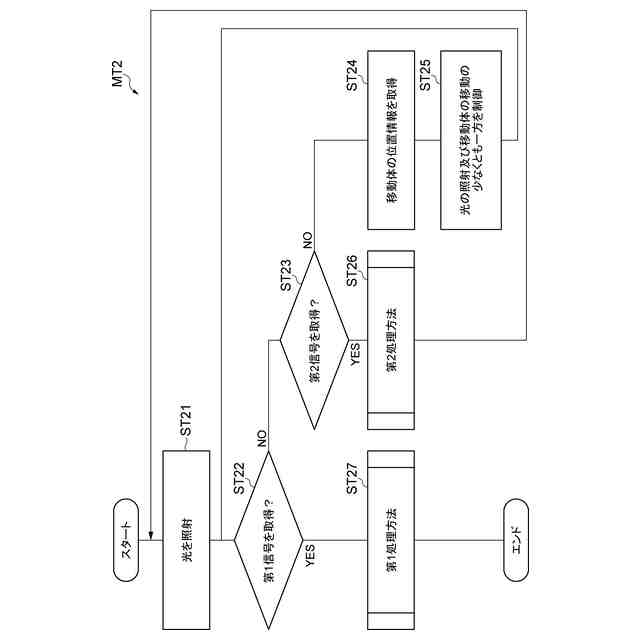
位置情報サービスによる信号を受信可能な移動体の受信機の受信結果に基づいて前記移動体の位置情報を取得する工程と、
光を照射する工程と、
前記移動体の受光器が前記光を受光した場合に前記移動体から出力される前記光の受光に関する第1信号、及び、前記受光器を囲むように配置された前記移動体の複数の光センサが前記光を受光した場合に前記移動体から出力される前記光の受光に関する第2信号を取得する工程と、
前記第1信号、前記第2信号及び前記位置情報の少なくとも1つに基づいて、前記移動体の検出位置を検出する工程と、
前記移動体の前記検出位置に基づいて、前記移動体に対する前記光の照射及び前記移動体の移動の少なくとも一方を制御する工程と、
前記受光器に受光された前記光に基づいて前記移動体の充電を行う工程と、
を含む、無線給電方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、無線給電システム、無線給電装置及び無線給電方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来から、移動体に光を照射することで遠方の物体へ無線で電力を伝送する無線電力伝送方式が知られている。特許文献1に記載の無線電力伝送方式は、光エネルギーの形で電力を遠方の物体に伝送する方式であって、近赤外光を放射する光源と、PV(Photovoltaic)セル及びソーラーセルを含む受光素子と、受光素子の周囲に配置された光センサとを備える。
【先行技術文献】
【特許文献】
【0003】
特開2019-13063号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
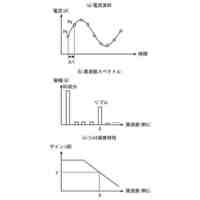
特許文献1に記載の無線電力伝送方式では、光源からの光ビームが移動体の受光素子にどのくらいの範囲で当たっているのかを検知し、位置情報を光ビームの送出側に送信し、光ビームの照射方向及び光ビームのスポットサイズを制御している。しかし、光源からの光ビームが移動体の光センサに当たっていない場合には、光ビームの送出側では移動体の位置情報を確認することができない可能性がある。
【0005】
本開示は、移動体に適切に光を照射することができる無線給電システム、無線給電装置及び無線給電方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一側面に係る無線給電システムは、光を照射する照射部と、照射部から光が照射された場合に光の受光に関する第1信号を出力可能な受光器と、受光器を囲むように配置され、光の受光に関する第2信号を出力可能な複数の光センサと、位置情報サービスによる信号を受信可能な受信機とを有する移動体と、受信機の受信結果に基づいて移動体の位置情報を取得する取得部と、第1信号、第2信号及び位置情報の少なくとも1つに基づいて、移動体に対する光の照射位置を検出する検出部と、照射位置に基づいて、照射部における移動体に対する光の照射及び移動体の移動の少なくとも一方を制御する照射制御部と、を備え、移動体は、受光器に受光された照射部からの光に基づいて充電される。
【0007】
この無線給電システムは、位置情報サービスによる信号を受信可能な受信機を有する。また、検出部は、受光器による第1信号、複数の光センサによる第2信号及び位置情報に基づいて、移動体に対する光の照射位置を検出する。照射制御部が、移動体に対する光の照射位置に基づいて移動体に対する光の照射及び移動体の移動の少なくとも一方を制御することによって、移動体の受光器に対する光の照射位置を合わせることができる。これにより、移動体の受光器に光が照射され、移動体は光に基づいて充電される。よって、この無線給電システムは、移動体に適切に光を照射することができる。
【0008】
一実施形態に係る無線給電システムにおいて、照射制御部は、位置情報に基づいて移動体を照射部によって光を照射可能な範囲内に移動させてもよい。この場合、例えば、照射部によって光を照射可能な範囲から移動体が大きく外れている場合等、照射部による光を受光器及び複数の光センサが受光できない場合であっても、取得部は、受信機の受信結果に基づいて移動体の位置情報を取得できる。そして、照射制御部が、照射部によって光を照射可能な範囲内まで移動体を移動させることで、検出部は、第1信号及び第2信号の少なくとも一方を受信することができる。よって照射制御部は、第1信号及び第2信号の少なくとも一方にも基づいて移動体に対する光の照射及び移動体の移動の少なくとも一方を精密に制御することができる。
【0009】
一実施形態に係る無線給電システムにおいて、受信機は、衛星測位システムによる複数の衛星からの信号を受信し、取得部は、受信機の衛星測位システムによる受信結果に基づいて、移動体の位置情報を取得してもよい。この場合、移動体に対する光の照射位置を、大まかに合わせることができる。これにより、移動体に対する照射部による光の照射位置を、少なくとも受光器の周囲に配置されている複数の光センサの位置に合わせることができる。移動体に対する照射部による光の照射位置を第1信号及び第2信号に基づいて精密に調整する前に、位置情報に基づいて大まかに合わせることができるため、移動体に対して光の照射位置を合わせることに必要な時間を短縮することができる。
【0010】
一実施形態に係る無線給電システムにおいて、受光器は、移動体の中心部に配置され、複数の光センサのうち受光器から最も離れている光センサと当該受光器との距離は、少なくとも衛星測位システムにおける最小誤差より大きくてもよい。この場合、衛星測位システムによる位置情報には少なくとも最小誤差が含まれるため、移動体に対する照射部による光の照射位置の詳細な位置合わせは受光器又は光センサにより行うことができればよい。ここで、受光器から最も離れている光センサと当該受光器との距離が少なくとも衛星測位システムにおける最小誤差より大きいことで、照射部による光の照射位置が受光器から最小誤差分ずれていた場合であっても、少なくとも光センサが照射部による光を受光することができる。これにより、照射制御部は、第1信号及び第2信号の少なくとも一方に基づいて移動体に対する光の照射及び移動体の移動の少なくとも一方を精密に制御することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
河村電器産業株式会社
電力変換装置
25日前
河村電器産業株式会社
電力制御システム
4日前
河村電器産業株式会社
電力管理システム、電力管理方法、及びプログラム
3日前
河村電器産業株式会社
無線給電システム、無線給電装置及び無線給電方法
4日前
河村電器産業株式会社
キュービクル管理システム、キュービクル管理方法、及びプログラム
3日前
河村電器産業株式会社
キュービクル管理システム、キュービクル管理方法、及びプログラム
5日前
個人
充電制御システム
4日前
ニデック株式会社
モータ
18日前
個人
発電装置
12日前
株式会社ナユタ
電源装置
4日前
個人
電流制御形AC-DC電源
11日前
個人
ステッピングモータ実習装置
25日前
キヤノン株式会社
電源装置
12日前
スズキ株式会社
移動システム
4日前
トヨタ自動車株式会社
駆動装置
14日前
サンデン株式会社
電力変換装置
19日前
サンデン株式会社
電力変換装置
19日前
カヤバ株式会社
モータ制御装置
7日前
カヤバ株式会社
モータ制御装置
7日前
トヨタ自動車株式会社
充電方法
1か月前
ダイハツ工業株式会社
グロメット
3日前
個人
回転力発生装置
10日前
株式会社ダイヘン
給電装置
5日前
ミツミ電機株式会社
電源回路
13日前
新電元工業株式会社
充電装置
1か月前
トヨタ自動車株式会社
電池システム
17日前
日産自動車株式会社
回転電機
14日前
ダイハツ工業株式会社
充電システム
13日前
シャープ株式会社
冷蔵庫
19日前
株式会社デンソー
携帯機
3日前
住友金属鉱山株式会社
遮熱装置
1か月前
富士電機株式会社
電力変換装置
7日前
ミネベアミツミ株式会社
回転機器
25日前
トヨタ自動車株式会社
電力管理システム
17日前
ミネベアミツミ株式会社
回転機器
25日前
株式会社日立製作所
回転電機
25日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ