TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025116696
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011269
出願日
2024-01-29
発明の名称
制御装置、制御方法、システム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H04N
23/695 20230101AFI20250801BHJP(電気通信技術)
要約
【課題】 本発明によればユーザの意図する構図を実現することが可能になる。
【解決手段】 撮像装置が撮像する撮像画像における被写体の位置を、目標位置に留めるように撮像方向を制御するための処理を実行する制御手段を有した制御装置であって、目標位置に設定されている第1の目標位置とは異なる第2の目標位置に関する設定を取得する取得手段と、撮像画像における第1の目標位置と第2の目標位置の距離を算出する算出手段と、を有し、取得手段が目標位置の変更を取得した場合、制御手段は、第1の目標位置と第2の目標位置の距離に応じて不感帯を変更する、ことを特徴とする制御装置。
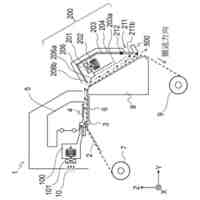
【選択図】 図2
特許請求の範囲
【請求項1】
撮像装置が撮像する撮像画像における被写体の位置を、目標位置に留めるように撮像方向を制御するための処理を実行する制御手段を有した制御装置であって、
前記目標位置に設定されている第1の目標位置とは異なる第2の目標位置に関する設定を取得する取得手段と、
前記撮像画像における前記第1の目標位置と前記第2の目標位置の距離を算出する算出手段と、
を有し、
前記取得手段が目標位置の変更を取得した場合、前記制御手段は、前記第1の目標位置と前記第2の目標位置の距離に応じて不感帯を変更する、
ことを特徴とする制御装置。
続きを表示(約 2,000 文字)
【請求項2】
前記制御手段は、前記算出手段が算出した距離が所定の閾値より大きい場合は、前記撮像画像における前記第2の目標位置を第1の不感帯に留めるように前記撮像方向を変更し、
前記制御手段は、前記算出手段が算出した距離が所定の閾値以下の場合は、前記第2の目標位置を第2の不感帯に留めるように前記撮像方向を変更し、
前記第1の不感帯ならびに前記第2の不感帯は前記被写体の位置を中心とした範囲であって、
前記第1の不感帯は前記第2の不感帯より小さい、
ことを特徴とする請求項1に記載の制御装置。
【請求項3】
前記第1の目標位置と前記第2の目標位置との距離は前記撮像画像におけるパン方向の距離ならびにチルト方向の距離のそれぞれのことを示し、
前記算出手段は、
前記パン方向の距離ならびに前記チルト方向の距離の少なくとも1つの距離が所定の閾値より大きい場合に前記算出手段が算出した距離が所定の閾値より大きいと判定し、
前記パン方向の距離ならびに前記チルト方向の距離のどちらも前記所定の閾値以下である場合に、前記算出手段が算出した距離が所定の閾値以下であると判定する判定手段を含む、
ことを特徴とする請求項2に記載の制御装置。
【請求項4】
前記制御手段が前記第2の目標位置が前記第2の不感帯に含まれると判定したとき、前記制御手段は前記第2の目標位置を前記第1の範囲に留めるように前記撮像方向を変更する、
ことを特徴とする請求項3に記載の制御装置。
【請求項5】
前記算出手段が算出した距離が所定の閾値より大きいと判定された場合は、前記制御手段は、第1の速度で第2の目標位置を前記第1の不感帯に留めるように前記撮像方向を制御し、
前記算出手段が算出した距離が所定の閾値以下と判定される場合は、第2の速度で前記第2の目標位置を前記第2の不感帯に留めるように前記撮像方向を制御し、
前記第2の速度は前記第1の速度より低速であることを特徴とする請求項4に記載の制御装置。
【請求項6】
前記算出手段が算出した距離が所定の閾値より大きいと判定される場合は、前記制御手段は、第1の速度で第2の目標位置を前記第1の範囲に留めるように前記撮像方向を変更し、
前記算出手段が算出した距離が所定の閾値以下と判定される場合、かつ、前記第2の目標位置が前記第1の不感帯に含まれない場合、前記第1の速度で前記第2の目標位置を前記第2の不感帯に留めるように前記撮像方向を変更し、
前記算出手段が算出した距離が所定の閾値以下と判定される場合、かつ、前記第2の目標位置が前記第1の不感帯に含まれる場合、前記第2の速度で前記第2の目標位置を前記第2の不感帯に留めるように前記撮像方向を変更する、
ことを特徴とする請求項4に記載の制御装置。
【請求項7】
前記算出手段が算出した距離が所定の閾値以下、かつ、前記撮像方向の制御速度が所定の閾値以下の場合、前記被写体の位置と前記第2の目標位置が一致するように前記撮像方向を制御する、
ことを特徴とする請求項3に記載の制御装置。
【請求項8】
前記撮像方向の制御速度とは、前記撮像装置のパン、チルトのそれぞれの制御速度のことを示し、
前記制御手段は、
前記撮像装置のパン、チルトの少なくとも1つの制御速度が所定の閾値より大きい場合に、前記制御速度が所定の閾値より大きい速度であると判定し、
前記撮像装置のパン、チルトのすべての制御速度が所定の閾値以下である場合に、前記制御速度が所定の閾値以下であると判定する、
ことを特徴とする請求項7に記載の制御装置。
【請求項9】
前記制御手段が前記被写体の位置が前記第2の目標位置と一致すると判定したとき、前記制御手段は前記第2の目標位置を前記第1の不感帯に留めるように前記撮像方向を変更する、
ことを特徴とする請求項8に記載の制御装置。
【請求項10】
撮像装置が撮像する撮像画像における被写体の位置を、目標位置に留めるように撮像方向を制御するための処理を実行する制御工程を有した制御装置の制御方法であって、
予め前記目標位置に設定されている第1の目標位置とは異なる第2の目標位置に関する設定を取得する取得工程と、
前記撮像画像における前記第1の目標位置と前記第2の目標位置の距離を算出する算出工程と、
を有し、
前記取得工程において目標位置の変更を取得した場合、前記制御工程において、前記制御手段は、前記第1の目標位置と前記第2の目標位置の距離に応じて不感帯を変更する、
ことを特徴とする制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、被写体を追尾する撮像装置の制御技術に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
PTZカメラと呼ばれるパン・チルト・ズームを制御することが可能なカメラにおいて、撮像画像から被写体を検出し、PTZカメラのパン・チルト・ズームを制御することで追尾する技術が知られている。係る追尾技術では、被写体を撮像画像において予め設定されたサイズ並びに位置(以下、目標位置と称す)に留めるようにカメラのパン・チルト・ズーム(以下PTZと称す)を自動的に制御することが可能である。
【0003】
特許文献1に、追尾する被写体(以下、追尾被写体と称す)が、不感帯の範囲内にあると判定したときはカメラの撮影方向を移動させず、不感帯の範囲外であると判定したときは該被写体を追尾する方向にカメラの撮影方向を移動させることが開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第4189534号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし特許文献1は、目標位置を変更した場合でも、追尾被写体が不感帯の範囲内にあると判定された場合や、不感帯の範囲内に追尾被写体が入った場合は追尾被写体が目標位置に到達前であっても撮影方向の変更を停止する。
【0006】
そこで本発明の目的は、ユーザが意図した撮像画像を提供することである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本実施形態における制御装置は、撮像装置が撮像する撮像画像における被写体の位置を、目標位置に留めるように撮像方向を制御するための処理を実行する制御手段を有した制御装置であって、目標位置に設定されている第1の目標位置とは異なる第2の目標位置に関する設定を取得する取得手段と、撮像画像における第1の目標位置と第2の目標位置の距離を算出する算出手段と、を有し、取得手段が目標位置の変更を取得した場合、制御手段は、第1の目標位置と第2の目標位置の距離に応じて不感帯を変更することを特徴とする。
【発明の効果】
【0008】
本発明によれば、ユーザが意図した撮像画像を提供することができる。
【図面の簡単な説明】
【0009】
第1の実施形態に係るシステム構成を示す図
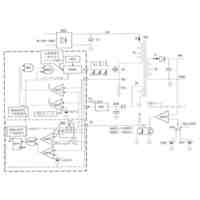
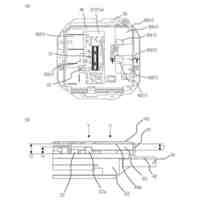
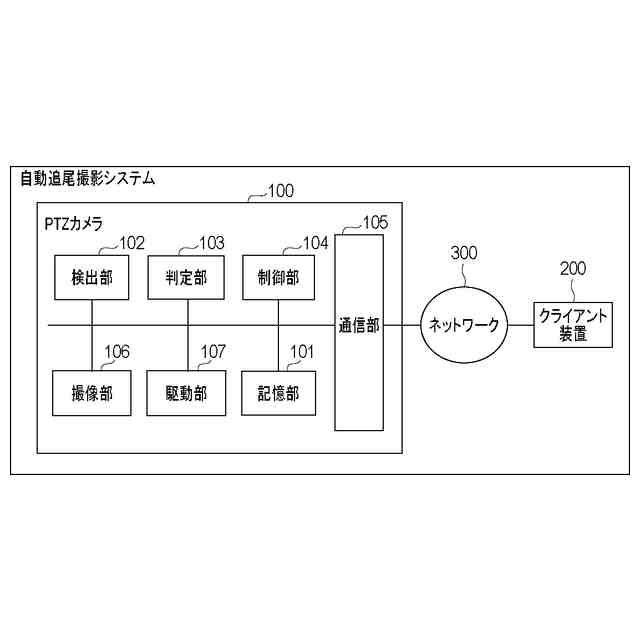
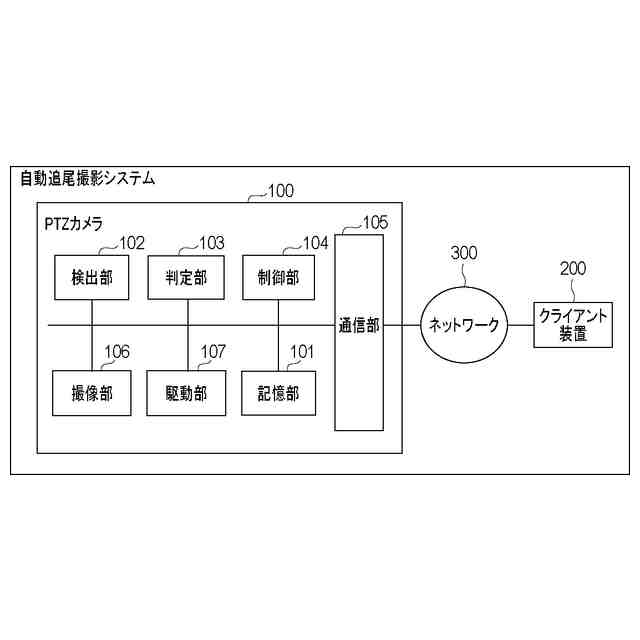
第1の実施形態に係るPTZカメラの機能ブロック構成図
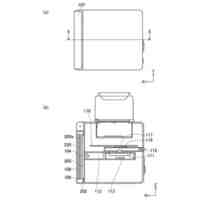
第1の実施形態に係るPTZカメラとクライアント装置のハードウェア構成図
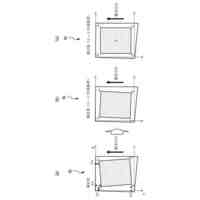
第1の実施形態に係る目標位置の変更した際の距離の算出を示す図
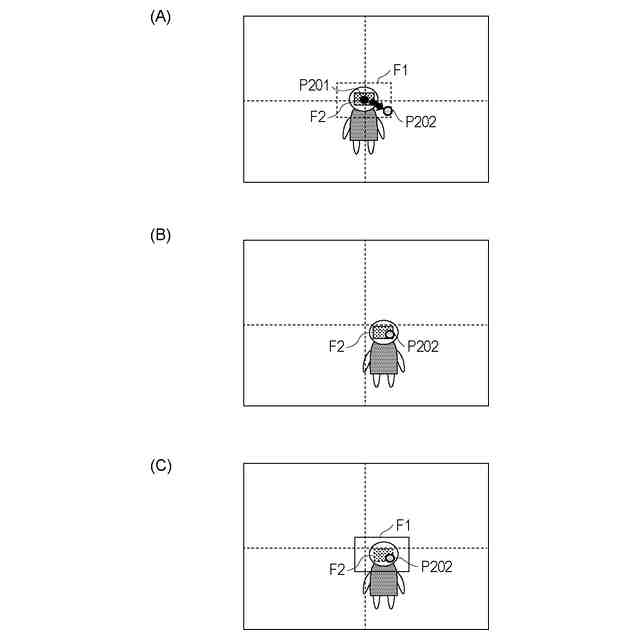
第1の実施形態に係る目標位置と不感帯の設定を示す図
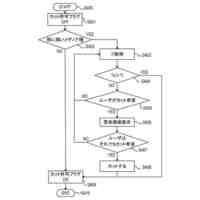
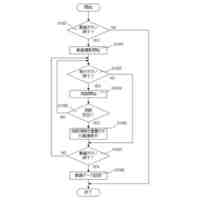
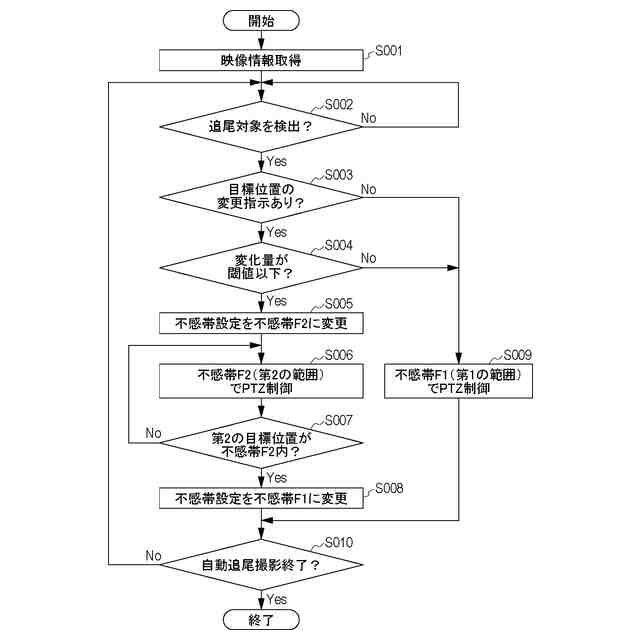
第1の実施形態に係る自動追尾制御を示すフローチャート
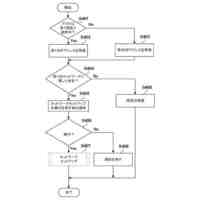
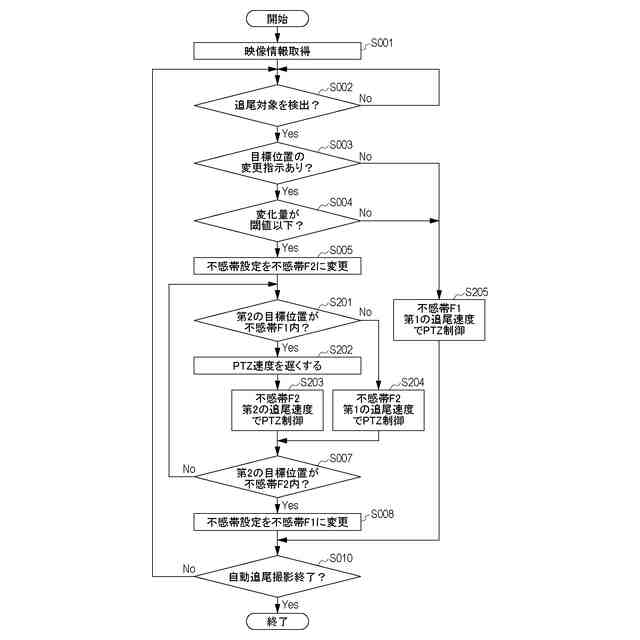
第2の実施形態に係る自動追尾制御を示すフローチャート
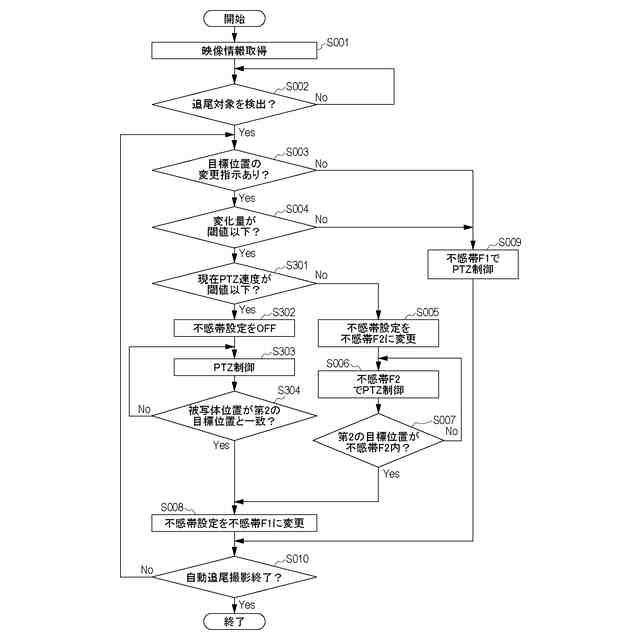
第3の実施形態に係る自動追尾制御を示すフローチャート
【発明を実施するための形態】
【0010】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではない。実施形態には複数の特徴が記載されているが、これらの複数の特徴の全てが発明に必須のものとは限らず、また、複数の特徴は任意に組み合わせられてもよい。さらに、添付図面においては、同一若しくは同様の構成に同一の参照番号を付し、重複した説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
撮像装置
18日前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
通信端末
1か月前
キヤノン株式会社
電源装置
13日前
キヤノン株式会社
電子機器
26日前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
電源装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
測距装置
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
乳酸センサ
4日前
キヤノン株式会社
プログラム
14日前
キヤノン株式会社
レンズ装置
11日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
画像形成装置
18日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ