TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116725
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011323
出願日
2024-01-29
発明の名称
移動ロボット、移動ロボットの制御方法、およびプログラム
出願人
グローリー株式会社
代理人
個人
主分類
G05D
1/244 20240101AFI20250801BHJP(制御;調整)
要約
【課題】マーカの更なる設置作業を必ずしも伴わずとも、移動ロボットの目標停止位置を柔軟に設定することが可能な技術を提供する。
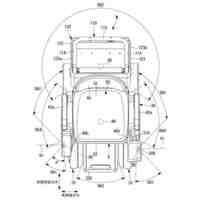
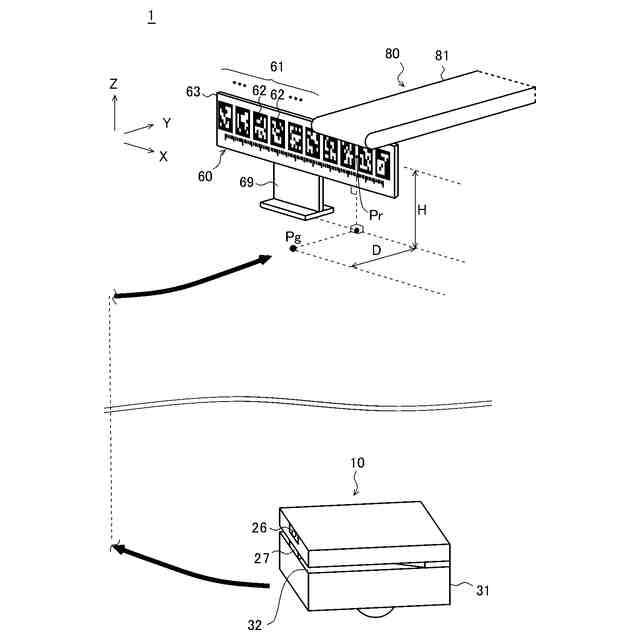
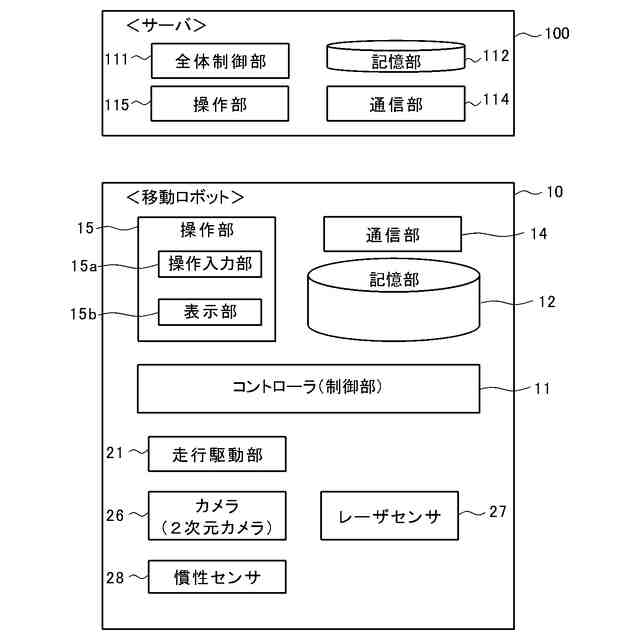
【解決手段】移動ロボット10の制御方法は、a)水平方向に予め配列された複数の固有マーカ62の中から任意に選択される基準マーカに応じた基準位置Prに基づき、目標停止位置Pgを設定するステップと、b)複数の固有マーカ62のうち、移動ロボット10に設けられたカメラ26の撮影画像内に含まれる固有マーカ62に基づき目標停止位置Pgを認識し、移動ロボットの走行制御を行うステップと、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動ロボットの制御方法であって、
a)前記移動ロボットの目標停止位置付近において水平方向に予め配列された複数の固有マーカの中から任意に選択される基準マーカに応じた基準位置に基づき、前記目標停止位置を設定するステップと、
b)前記複数の固有マーカのうち、前記移動ロボットに設けられたカメラの撮影画像内に含まれる固有マーカに基づき前記目標停止位置を認識し、前記移動ロボットの走行制御を行うステップと、
を備えることを特徴とする、移動ロボットの制御方法。
続きを表示(約 1,200 文字)
【請求項2】
前記目標停止位置は、ユーザによって指定される前記基準位置と、前記基準位置に対する前記目標停止位置の相対的関係とに基づき、設定されることを特徴とする、請求項1に記載の移動ロボットの制御方法。
【請求項3】
前記基準位置は、前記複数の固有マーカの配列方向において前記複数の固有マーカの配置範囲内にて変更可能であることを特徴とする、請求項1または請求項2に記載の移動ロボットの制御方法。
【請求項4】
前記基準位置は、前記複数の固有マーカの近傍に配置された目盛りであって前記複数の固有マーカの配列方向における各固有マーカの位置を示す目盛りに基づき指定されることを特徴とする、請求項1から請求項3のいずれかに記載の移動ロボットの制御方法。
【請求項5】
前記複数の固有マーカは、上面視にて直線状に配置されていることを特徴とする、請求項1から請求項4のいずれかに記載の移動ロボットの制御方法。
【請求項6】
前記目標停止位置は、上面視にて、前記基準位置から前記複数の固有マーカの配列方向に垂直な方向に向かう直線上に設定されることを特徴とする、請求項5に記載の移動ロボットの制御方法。
【請求項7】
前記複数の固有マーカは、帯状シートに印刷出力されて形成されることを特徴とする、請求項1から請求項6のいずれかに記載の移動ロボットの制御方法。
【請求項8】
前記ステップb)は、
b-1)前記複数の固有マーカのうち前記基準マーカが前記撮影画像内に含まれない場合であっても、前記複数の固有マーカのうち、前記撮影画像内に含まれる他の固有マーカに基づき、前記目標停止位置を認識するステップ、
を備えることを特徴とする、請求項1から請求項7のいずれかに記載の移動ロボットの制御方法。
【請求項9】
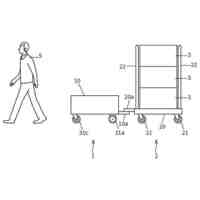
c)前記目標停止位置付近に配置された受渡先設備と前記移動ロボットとの間で搬送対象の物品の受け渡しを行うステップ、
をさらに備えることを特徴とする、請求項1から請求項8のいずれかに記載の移動ロボットの制御方法。
【請求項10】
前記ステップa)においては、前記目標停止位置における前記移動ロボットの目標角度である目標停止角度もが設定され、
前記ステップb)は、
b-2)現在位置と前記目標停止位置と前記目標停止角度とに基づく仮目標位置を随時更新しつつ設定し、当該仮目標位置に向けて前記移動ロボットを随時移動させることによって、前記移動ロボットを前記目標停止位置に向けて移動させるステップ、
を備えることを特徴とする、請求項1から請求項9のいずれかに記載の移動ロボットの制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動ロボットおよびそれに関連する技術に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
自律移動ロボットの移動制御方法において、固有マーカ(認識用マーカ)を用いる技術が存在する(特許文献1参照)。
【0003】
特許文献1においては、教示された教示経路に沿って移動する教示経路追従移動制御と目的地に設けられた認識用マーカを画像認識して移動するマーカ追従移動制御とを切り替える技術が記載されている。マーカ追従移動制御において、自律移動ロボットは、目的地に予め設けられた認識用マーカに基づき位置を認識し、当該認識用マーカによる位置認識結果に基づき目標停止位置へ向けて移動する。
【0004】
特許文献1の技術では、目的地に単一の認識用マーカが固定されて配置されており、当該単一の認識用マーカによって単一の目標停止位置が決定される。
【先行技術文献】
【特許文献】
【0005】
特開2015-121928号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、移動ロボットによる物品搬送等において、搬送対象物の受渡場所(たとえば受渡先設備(ベルトコンベヤ等)の位置)が変更される状況が生じ得る。たとえば、元の(変更前の)位置から10cm横にずらした位置が変更後の受渡場所(受渡位置)として決定されることがある。その場合(特に、床面に対して固定された固定台等に認識用マーカが設置されていた場合等)には、上記従来技術では、変更後の受渡位置に応じた箇所に認識用マーカを設置し直す(貼り直す)作業(再設置作業)が求められる。
【0007】
あるいは、新たな受渡場所を既存の受渡場所の近傍に追加する状況(たとえば、新たなベルトコンベヤを既存のベルトコンベヤの横に追加配置する状況、あるいは、物品載置棚における新たな載置場所を既存の載置場所の近傍(数十cm横)に追加する状況)等も生じ得る。その場合、上記従来技術においては、認識用マーカを新たな受渡位置に応じた箇所に新たに追加して設置する作業(追加設置作業)等が求められる。
【0008】
しかしながら、再設置作業および追加設置作業等は煩雑であり、そのような更なる設置作業が発生することは効率的ではない。
【0009】
そこで、この発明は、マーカの更なる設置作業を必ずしも伴わずとも、移動ロボットの目標停止位置を柔軟に設定することが可能な技術を提供することを課題とする。
【課題を解決するための手段】
【0010】
上記課題を解決すべく、本発明に係る移動ロボットの制御方法は、a)前記移動ロボットの目標停止位置付近において水平方向に予め配列された複数の固有マーカの中から任意に選択される基準マーカに応じた基準位置に基づき、前記目標停止位置を設定するステップと、b)前記複数の固有マーカのうち、前記移動ロボットに設けられたカメラの撮影画像内に含まれる固有マーカに基づき前記目標停止位置を認識し、前記移動ロボットの走行制御を行うステップと、を備えることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
22日前
個人
作業車両自動化システム
3日前
愛知製鋼株式会社
目標軌跡の設定方法
11日前
ローム株式会社
半導体集積回路
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1日前
三栄ハイテックス株式会社
基準電圧回路
2か月前
トヨタ自動車株式会社
生産管理システム
8日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
2か月前
三菱電機株式会社
自己位置推定装置
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
トヨタ自動車株式会社
減圧弁
5日前
株式会社オプトン
制御プログラム生成装置
1か月前
株式会社鷺宮製作所
制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
マーク ヘイリー
消防ロボット
15日前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社テイエルブイ
減圧弁の制御装置
17日前
アズビル株式会社
制御システムおよび制御方法
11日前
アズビル株式会社
制御システムおよび制御方法
11日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
三菱電機株式会社
電源回路
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
オムロン株式会社
安全装置
1か月前
株式会社ダイヘン
搬送車
2か月前
ミツミ電機株式会社
電源回路および駆動回路
11日前
ローム株式会社
半導体装置
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ