TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025125241
公報種別
公開特許公報(A)
公開日
2025-08-27
出願番号
2024021171
出願日
2024-02-15
発明の名称
ワイパ制御装置、及びワイパ制御方法
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
B60S
1/08 20060101AFI20250820BHJP(車両一般)
要約
【課題】対向式ワイパにおいて互いの干渉を回避しつつも視界阻害を生じ難くすることができるワイパ制御装置、及びワイパ制御方法を提供する。
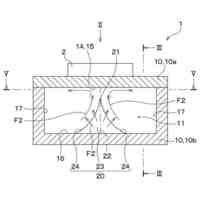
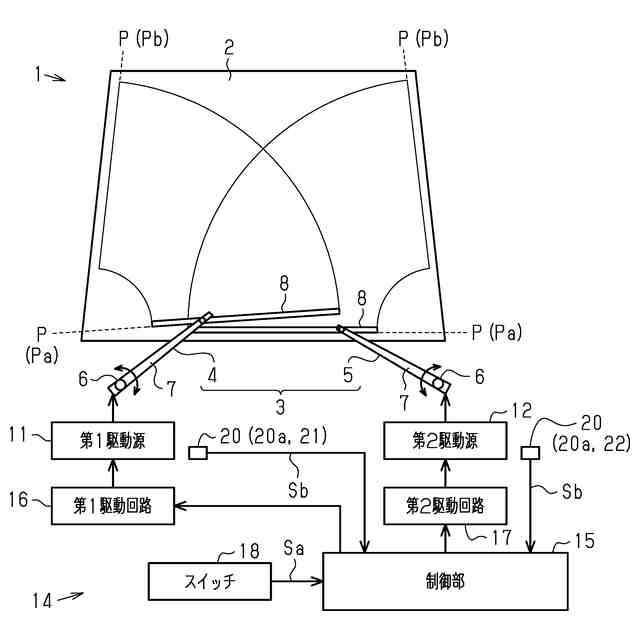
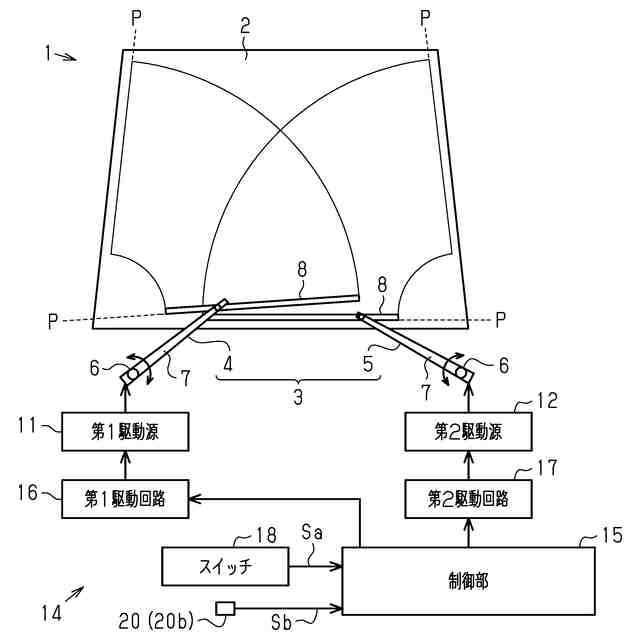
【解決手段】対向式ワイパ3の制御部15は、第1ワイパ4及び第2ワイパ5をともに往路作動させてこれらの両方を第2反転位置Pbに移動させる動作と、第1ワイパ4及び第2ワイパ5をともに復路作動させてこれらの両方を第1反転位置Paに移動させる動作と、を交互に実行する第1同期制御と、第1ワイパ4及び第2ワイパ5の一方を往路作動させるとともに他方を復路作動させるように制御する第2同期制御と、を実行する。制御部15は、第1同期制御と第2同期制御とを選択的に実行する。
【選択図】図1
特許請求の範囲
【請求項1】
第1駆動源(11)によって駆動される第1ワイパ(4)と、第2駆動源(12)によって駆動される第2ワイパ(5)とを、初期位置である第1反転位置(Pa)と前記第1反転位置に対向する位置の第2反転位置(Pb)との各反転位置(P)で繰り返し揺動反転させることにより、往復払拭動作を実行する対向式ワイパ(3)のワイパ制御装置(14)であって、
前記第1ワイパ及び前記第2ワイパの前記第2反転位置へ向けた移動である往路作動と、前記第1ワイパ及び前記第2ワイパの前記第1反転位置へ向けた移動である復路作動とにおいて、同期制御によって前記第1ワイパと前記第2ワイパとを同期させて往復払拭動作を実行する制御部(15)を備え、
前記制御部は、
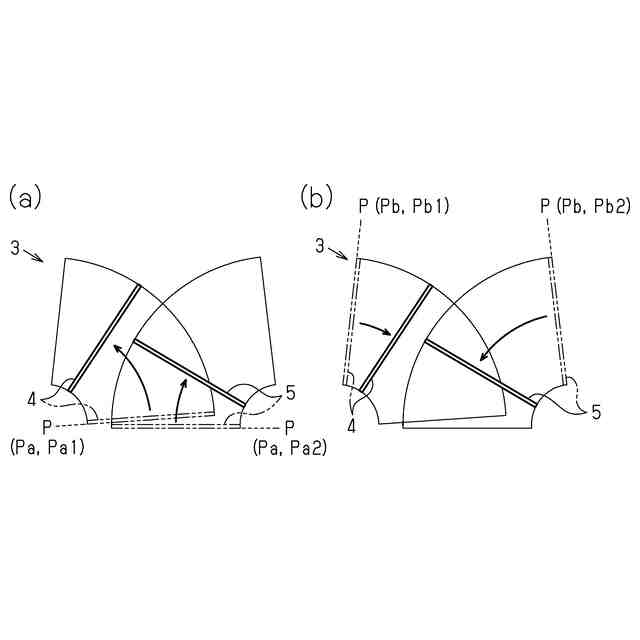
前記第1ワイパ及び前記第2ワイパをともに前記往路作動させて前記第1ワイパ及び前記第2ワイパの両方を前記第2反転位置へ移動させる動作と、前記第1ワイパ及び前記第2ワイパをともに前記復路作動させて前記第1ワイパ及び前記第2ワイパの両方を前記第1反転位置へ移動させる動作と、を交互に実行する第1同期制御と、前記第1ワイパ及び前記第2ワイパの一方を前記往路作動させるとともに他方を前記復路作動させるように制御する第2同期制御と、を実行し、
更に、前記制御部は、前記第1同期制御と前記第2同期制御とを選択的に実行する、ワイパ制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記第1反転位置は、前記第1ワイパ及び前記第2ワイパの各々の復路から往路への反転位置であり、
前記第2反転位置は、前記第1ワイパ及び前記第2ワイパの各々の往路から復路への反転位置である、請求項1に記載のワイパ制御装置。
【請求項3】
前記第1ワイパ及び前記第2ワイパの少なくとも一方の移動時の位置を直接又は間接的に検出する検出部(20)を備え、
前記制御部は、前記検出部の検出信号(Sb)に基づいて、前記第1同期制御と前記第2同期制御との間の選択を実行する、請求項1に記載のワイパ制御装置。
【請求項4】
前記検出部は、前記第1ワイパ及び前記第2ワイパの少なくとも一方の位置を直接検出する位置検出部(20a)であり、
前記制御部は、前記第1同期制御が選択されているとき、前記位置検出部の前記検出信号を用いた判定において、前記第1ワイパ及び前記第2ワイパの少なくとも一方の移動が反転位置間の移動範囲の途中で停止していると判定した場合に、前記第1同期制御から前記第2同期制御に切り替える、請求項3に記載のワイパ制御装置。
【請求項5】
前記制御部は、前記第2同期制御が選択されているとき、前記位置検出部の前記検出信号を用いた判定において、前記第1ワイパ及び前記第2ワイパの少なくとも一方が前記移動範囲内の全領域又は規定領域を正常に動くと判定した場合に、前記第2同期制御から前記第1同期制御に切り替える、請求項4に記載のワイパ制御装置。
【請求項6】
前記検出部は、前記第1ワイパ及び前記第2ワイパを有する車両の速度を検出する車速検出部(20b)であり、
前記制御部は、前記第1同期制御が選択されているとき、前記車速検出部の前記検出信号を用いた判定において、車速(V)が閾値(Vk)を超えた場合に、前記第1同期制御から前記第2同期制御に切り替える、請求項3に記載のワイパ制御装置。
【請求項7】
前記制御部は、前記第2同期制御が選択されているとき、前記閾値としての第1閾値(Vk1)以下の値に設定された第2閾値(Vk2)を用いた判定を実行し、車速が前記第2閾値未満又は以下であると判定した場合に、前記第2同期制御から前記第1同期制御に切り替える、請求項6に記載のワイパ制御装置。
【請求項8】
前記制御部は、前記同期制御を前記第1同期制御と前記第2同期制御との間で切り替える場合に、前記第1ワイパ及び前記第2ワイパの一方を停止させて他方のみを作動させる移行制御を実行する、請求項1に記載のワイパ制御装置。
【請求項9】
前記制御部は、前記対向式ワイパのスイッチ(18)を用いた切替操作によって設定された作動モードに基づいて、前記第1同期制御と前記第2同期制御とを切り替える、請求項1に記載のワイパ制御装置。
【請求項10】
前記制御部は、前記対向式ワイパの払拭周期に基づいて、前記第1同期制御と前記第2同期制御とを切り替える、請求項1に記載のワイパ制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワイパ制御装置、及びワイパ制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、特許文献1に開示されるように、対向式ワイパを往復動させることによってウィンドウガラスを払拭するワイパ装置が周知である。対向式ワイパは、例えば、一対のワイパを向き合うように作動させることにより、ウィンドウガラスに付着した雨や汚れなどを払拭する。
【先行技術文献】
【特許文献】
【0003】
特公平6-67717号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
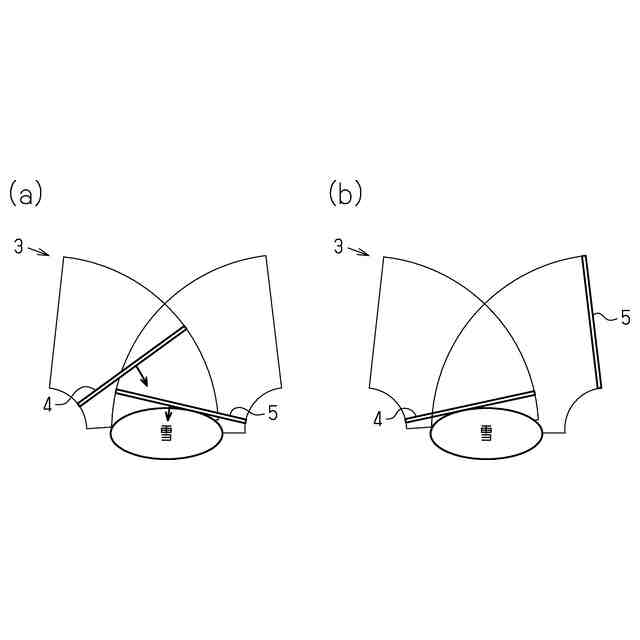
ところで、ウィンドウガラスの下部にはエンジンフードがあるため、降雪時、ウィンドウガラスに付着した雪をワイパで払拭しても、雪を押し出せずにフード部分に溜まることが多い。このとき、先行するワイパが雪溜まりを検知すると、互いのワイパの干渉を回避するために、先行するワイパの速度が低速化されたり、一時停止されたりするので、後続するワイパが先行するワイパの手前の高い位置で停止する。よって、視界、特に運転視界が後続のワイパによって阻害されてしまう可能性があった。
【0005】
本発明の目的は、対向式ワイパにおいて互いの干渉を回避しつつも視界阻害を生じ難くすることができるワイパ制御装置、及びワイパ制御方法を提供することにある。
【課題を解決するための手段】
【0006】
前記課題を解決するワイパ制御装置(14)は、第1駆動源(11)によって駆動される第1ワイパ(4)と、第2駆動源(12)によって駆動される第2ワイパ(5)とを、初期位置である第1反転位置(Pa)と前記第1反転位置に対向する位置の第2反転位置(Pb)との各反転位置(P)で繰り返し揺動反転させることにより、往復払拭動作を実行する対向式ワイパ(3)に用いられる装置であって、前記第1ワイパ及び前記第2ワイパの前記第2反転位置へ向けた移動である往路作動と、前記第1ワイパ及び前記第2ワイパの前記第1反転位置へ向けた移動である復路作動とにおいて、同期制御によって前記第1ワイパと前記第2ワイパとを同期させて往復払拭動作を実行する制御部(15)を備え、前記制御部は、前記第1ワイパ及び前記第2ワイパをともに前記往路作動させて前記第1ワイパ及び前記第2ワイパの両方を前記第2反転位置へ移動させる動作と、前記第1ワイパ及び前記第2ワイパをともに前記復路作動させて前記第1ワイパ及び前記第2ワイパの両方を前記第1反転位置へ移動させる動作と、を交互に実行する第1同期制御と、前記第1ワイパ及び前記第2ワイパの一方を前記往路作動させるとともに他方を前記復路作動させるように制御する第2同期制御と、を実行し、更に、前記制御部は、前記第1同期制御と前記第2同期制御とを選択的に実行する。
【0007】
前記課題を解決するワイパ制御方法は、第1駆動源(11)によって駆動される第1ワイパ(4)と、第2駆動源(12)によって駆動される第2ワイパ(5)とを、初期位置である第1反転位置(Pa)と前記第1反転位置に対向する位置の第2反転位置(Pb)との各反転位置(P)で繰り返し揺動反転させることにより、往復払拭動作を実行する対向式ワイパ(3)に用いられる方法であって、前記対向式ワイパは、前記第1ワイパ及び前記第2ワイパの前記第2反転位置へ向けた移動である往路作動と、前記第1ワイパ及び前記第2ワイパの前記第1反転位置へ向けた移動である復路作動とにおいて、同期制御によって前記第1ワイパと前記第2ワイパとを同期させて往復払拭動作を実行し、前記同期制御は、前記第1ワイパ及び前記第2ワイパをともに前記往路作動させて前記第1ワイパ及び前記第2ワイパの両方を前記第2反転位置へ移動させる動作と、前記第1ワイパ及び前記第2ワイパをともに前記復路作動させて前記第1ワイパ及び前記第2ワイパの両方を前記第1反転位置へ移動させる動作と、を交互に実行する第1同期制御と、前記第1ワイパ及び前記第2ワイパの一方を前記往路作動させるとともに他方を前記復路作動させるように制御する第2同期制御と、を含み、更に、前記同期制御は、前記第1同期制御と前記第2同期制御とを選択的に実行する。
【0008】
本構成のワイパ制御装置、及びワイパ制御方法によれば、第1同期制御と第2同期制御とを選択的に実行可能としたので、第1ワイパ及び第2ワイパの両方とも、互いの干渉を回避しつつもできる限り反転位置まで移動させて往復払拭動作を繰り返すことが可能となる。よって、ワイパによる視界阻害を生じ難くすることが可能となる。
【発明の効果】
【0009】
本発明は、対向式ワイパにおいて互いの干渉を回避しつつも視界阻害を生じ難くすることができる。
【図面の簡単な説明】
【0010】
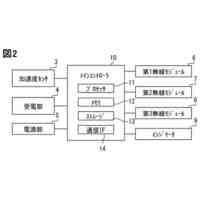
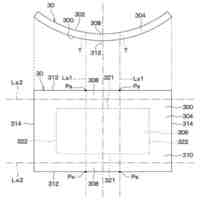
第1実施形態に係るワイパ制御装置の構成図である。
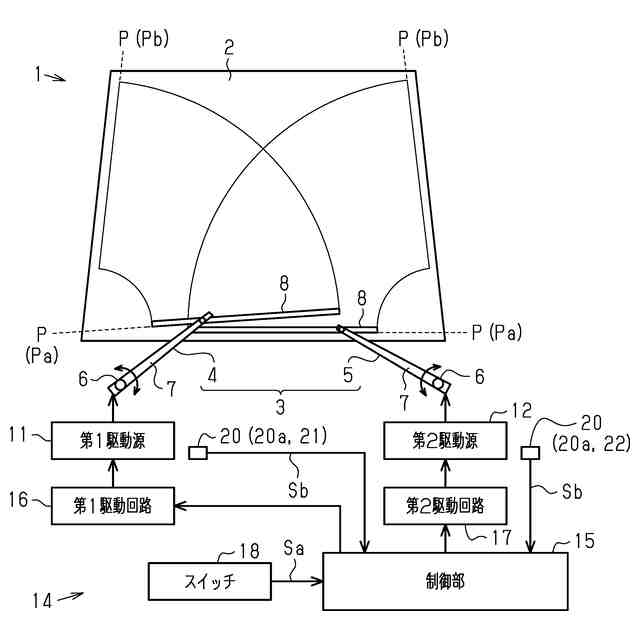
(a)、(b)は、対向式ワイパの動作図である。
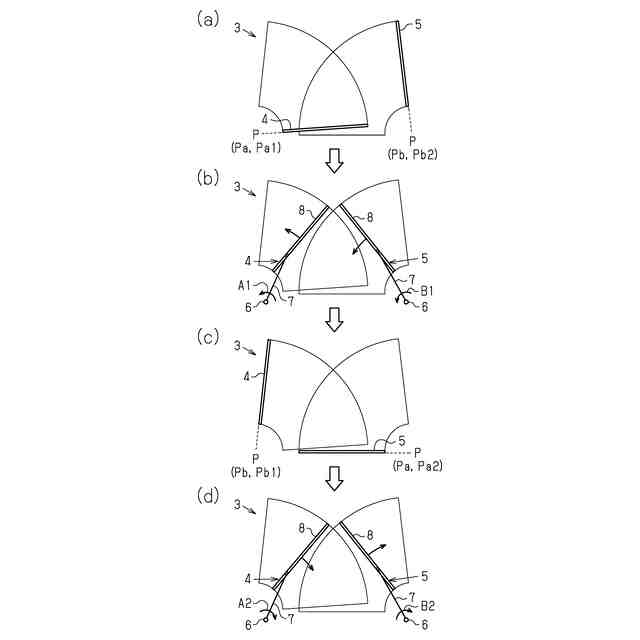
(a)~(d)は、第1同期制御の説明図である。
(a)~(d)は、第2同期制御の説明図である。
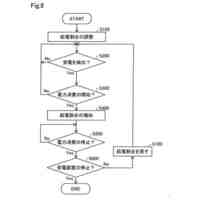
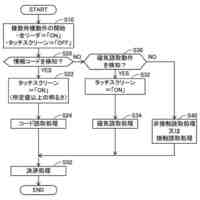
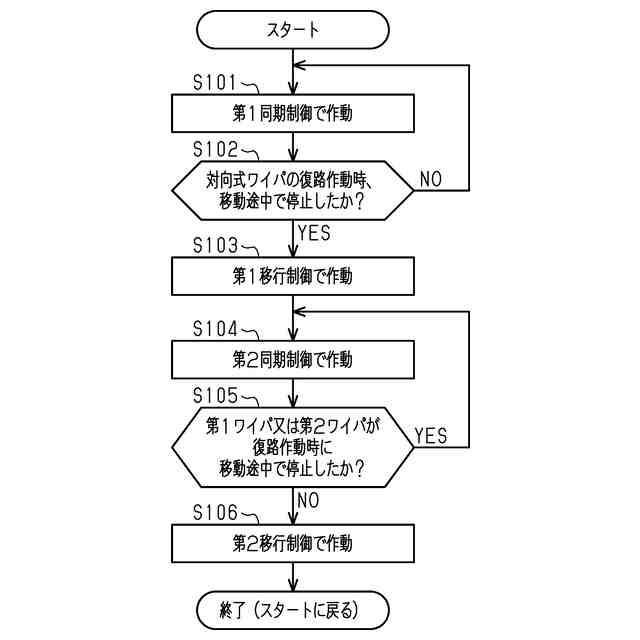
第1同期制御及び第2同期制御の切替えのフローチャートである。
(a)、(b)は、雪が溜まった際の対向式ワイパの動作図である。
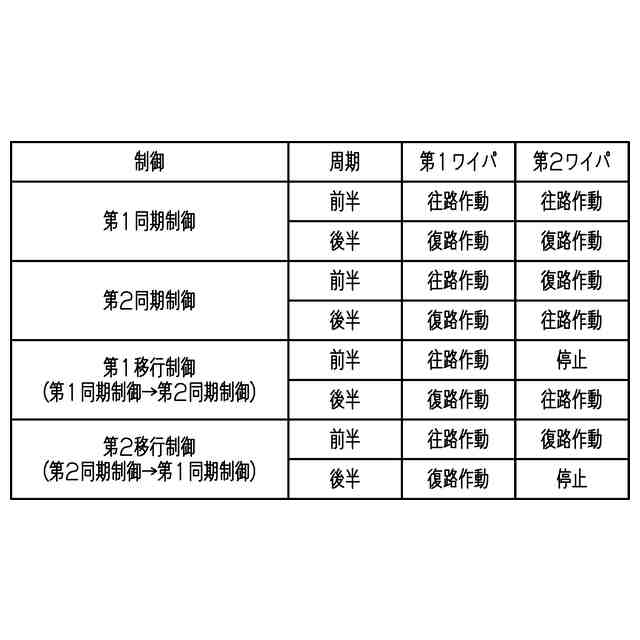
同期制御の各制御の内容をまとめた表である。
第2実施形態に係るワイパ制御装置の構成図である。
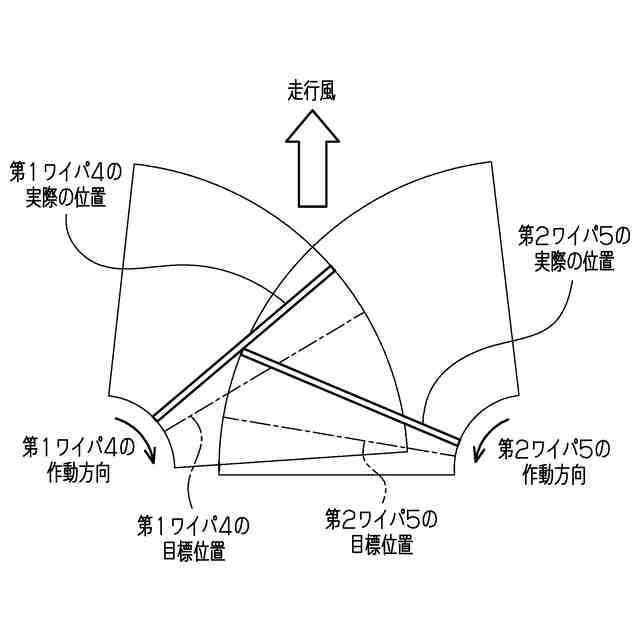
第1同期制御の際の対向式ワイパの状態を示す説明図である。
第1同期制御及び第2同期制御の切替えのフローチャートである。
第2同期制御の際の対向式ワイパの状態を示す説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
携帯機
24日前
株式会社デンソーエレクトロニクス
発音器
2か月前
株式会社デンソー
光学部材
1か月前
株式会社デンソー
制御装置
2か月前
株式会社デンソー
電子装置
2か月前
株式会社デンソー
ステータ
12日前
株式会社デンソー
電子装置
2か月前
株式会社デンソー
電子装置
13日前
株式会社デンソー
撮像装置
2か月前
株式会社デンソー
送電装置
13日前
株式会社デンソー
ステータ
17日前
株式会社デンソー
熱交換器
2か月前
株式会社デンソー
電子装置
17日前
株式会社デンソー
冷却装置
2か月前
株式会社デンソー
通信装置
2か月前
株式会社デンソー
電子装置
2か月前
株式会社デンソーウェーブ
携帯端末
19日前
株式会社デンソー
検出装置
2か月前
株式会社デンソー
電子機器
24日前
株式会社デンソー
圧電素子
26日前
株式会社デンソー
受電装置
2か月前
株式会社デンソー
駆動装置
27日前
株式会社デンソー
駆動装置
27日前
株式会社デンソー
電子装置
28日前
株式会社デンソー
通信装置
1か月前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
電源装置
1か月前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
電子装置
10日前
株式会社デンソー
電子装置
2か月前
株式会社デンソー
受電装置
2か月前
株式会社デンソーウェーブ
決済端末
2か月前
株式会社デンソー
測距装置
3日前
株式会社デンソー
半導体装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ