TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125616
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021650
出願日
2024-02-16
発明の名称
センサシステム、移動体、センサシステムの制御方法、センサシステムの制御プログラム、および、コンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体
出願人
株式会社小糸製作所
代理人
弁理士法人アルファ国際特許事務所
主分類
B60W
50/023 20120101AFI20250821BHJP(車両一般)
要約
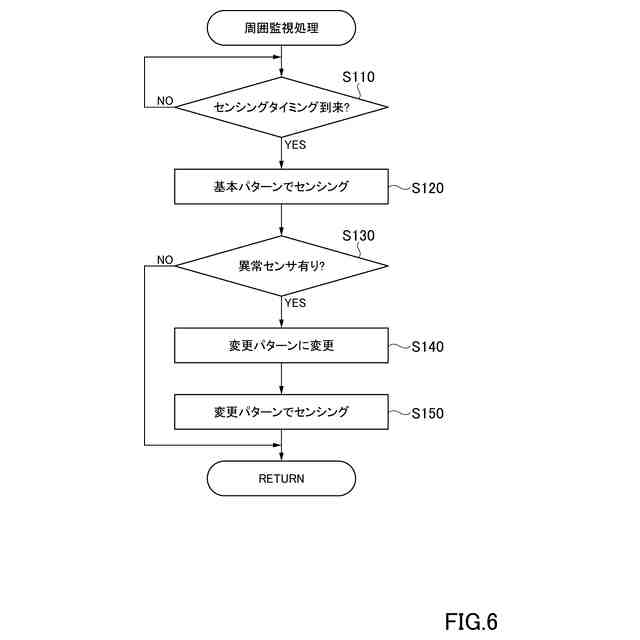
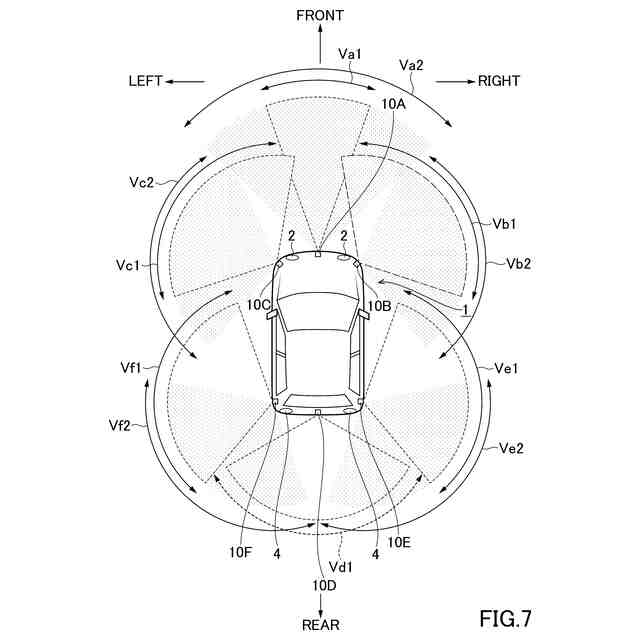
【課題】異常状態となった反射型センサの視野を補う。
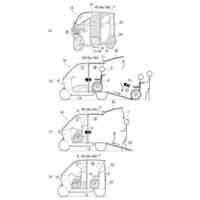
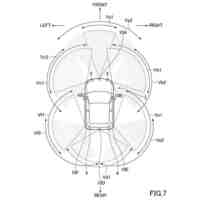
【解決手段】センサシステムのコントローラは、第1の反射型センサの視野と第2の反射型センサの視野とが、第1の方向に互いに隣り合う第1の視野パターンで、第1の反射型センサによる検知結果と第2の反射型センサによる検知結果とに基づき、測定対象に対するセンシングを行う。コントローラは、所定の変更条件が満たされた場合、第2の視野パターンに設定する。第2の視野パターンは、第1の方向において、第1の反射型センサの視野中心の向きと視野角との少なくとも一方を変更し、変更後の第1の反射型センサの視野と、第1の視野パターンにおける第2の反射型センサの視野との重複領域を、第1の視野パターンよりも増大させたパターンである。コントローラは、第2の視野パターンで、第1の反射型センサによる検知結果に基づき、測定対象に対するセンシングを行う。
【選択図】図7
特許請求の範囲
【請求項1】
第1の反射型センサと、
第2の反射型センサと、
コントローラと、を備えるセンサシステムであって、
前記コントローラは、
前記第1の反射型センサの視野と前記第2の反射型センサの視野とが、第1の方向に互いに隣り合う第1の視野パターンで、前記第1の反射型センサによる検知結果と前記第2の反射型センサによる検知結果とに基づき、測定対象に対するセンシングを行い、
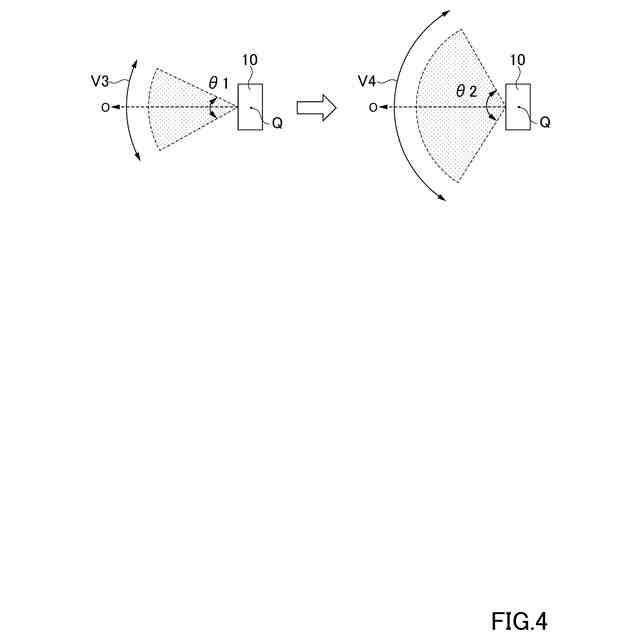
所定の変更条件が満たされた場合、前記第1の方向において、前記第1の反射型センサの視野中心の向きと視野角との少なくとも一方を変更し、変更後の前記第1の反射型センサの視野と、前記第1の視野パターンにおける前記第2の反射型センサの視野との重複領域を、前記第1の視野パターンよりも増大させた第2の視野パターンに設定し、
前記第2の視野パターンで、前記第1の反射型センサによる検知結果に基づき、前記測定対象に対するセンシングを行う、センサシステム。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載のセンサシステムであって、
前記所定の変更条件には、前記コントローラが前記第2の反射型センサの異常を検知したことを含む、センサシステム。
【請求項3】
請求項1に記載のセンサシステムであって、
前記コントローラは、
前記第1の視野パターンに対して前記第1の反射型センサの視野角を広くして、前記第2の視野パターンに設定し、
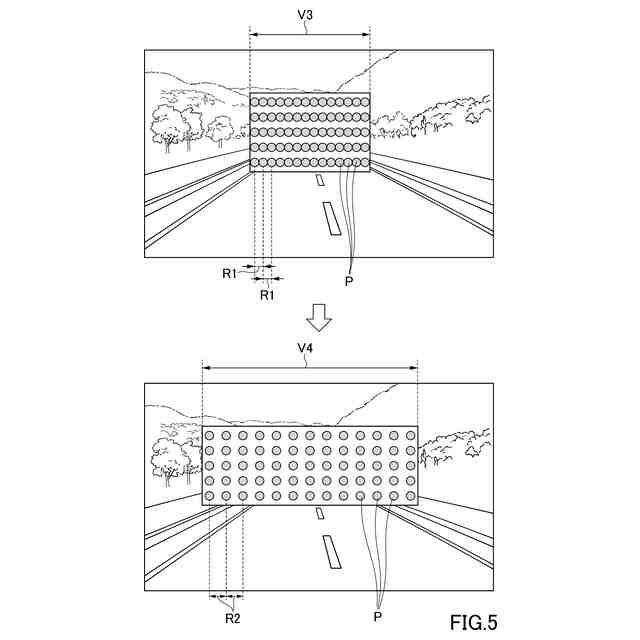
前記第1の視野パターンにおける前記第1の反射型センサの角度分解能は、前記第2の視野パターンにおける前記第1の反射型センサの角度分解能よりも高い、センサシステム。
【請求項4】
請求項1に記載のセンサシステムであって、
更に、前記第1の方向において、前記第1の反射型センサに対して前記第2の反射型センサとは反対側に位置する第3の反射型センサを備え、
前記コントローラは、
前記第1の反射型センサの視野中心の向きを変更して、前記第2の視野パターンに設定し、
前記第3の反射型センサの視野中心の向きと視野角との少なくとも一方を変更し、変更後の前記第3の反射型センサの視野と、前記第1の視野パターンにおける前記第1の反射型センサの視野との重複領域を、前記第1の視野パターンよりも増大させる、センサシステム。
【請求項5】
請求項1から請求項4までのいずれか一項に記載のセンサシステムを備える移動体であって、
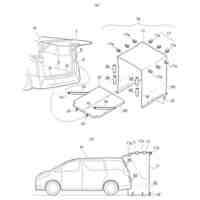
前記第1の反射型センサと前記第2の反射型センサとは、前記移動体の前側に配置されている、移動体。
【請求項6】
第1の反射型センサと、第2の反射型センサと、を備えるセンサシステムの制御方法であって、
前記第1の反射型センサの視野と前記第2の反射型センサの視野とが、第1の方向に互いに隣り合う第1の視野パターンで、前記第1の反射型センサによる検知結果と前記第2の反射型センサによる検知結果とに基づき、測定対象に対するセンシングを行い、
所定の変更条件が満たされた場合、前記第1の方向において、前記第1の反射型センサの視野中心の向きと視野角との少なくとも一方を変更し、変更後の前記第1の反射型センサの視野と、前記第1の視野パターンにおける前記第2の反射型センサの視野との重複領域を、前記第1の視野パターンよりも増大させた第2の視野パターンに設定し、
前記第2の視野パターンで、前記第1の反射型センサによる検知結果に基づき、前記測定対象に対するセンシングを行う、センサシステムの制御方法。
【請求項7】
第1の反射型センサと、第2の反射型センサと、を備えるセンサシステムが有するコントローラに、
前記第1の反射型センサの視野と前記第2の反射型センサの視野とが、第1の方向に互いに隣り合う第1の視野パターンで、前記第1の反射型センサによる検知結果と前記第2の反射型センサによる検知結果とに基づき、測定対象に対するセンシングを行わせ、
所定の変更条件が満たされた場合、前記第1の方向において、前記第1の反射型センサの視野中心の向きと視野角との少なくとも一方を変更し、変更後の前記第1の反射型センサの視野と、前記第1の視野パターンにおける前記第2の反射型センサの視野との重複領域を、前記第1の視野パターンよりも増大させた第2の視野パターンに設定させ、
前記第2の視野パターンで、前記第1の反射型センサによる検知結果に基づき、前記測定対象に対するセンシングを行わせる、センサシステムの制御プログラム。
【請求項8】
第1の反射型センサと、第2の反射型センサと、を備えるセンサシステムを制御するためのコンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体であって、
前記センサシステムに対して、
前記第1の反射型センサの視野と前記第2の反射型センサの視野とが、第1の方向に互いに隣り合う第1の視野パターンで、前記第1の反射型センサによる検知結果と前記第2の反射型センサによる検知結果とに基づき、測定対象に対するセンシングを行わせ、
所定の変更条件が満たされた場合、前記第1の方向において、前記第1の反射型センサの視野中心の向きと視野角との少なくとも一方を変更し、変更後の前記第1の反射型センサの視野と、前記第1の視野パターンにおける前記第2の反射型センサの視野との重複領域を、前記第1の視野パターンよりも増大させた第2の視野パターンに設定させ、
前記第2の視野パターンで、前記第1の反射型センサによる検知結果に基づき、前記測定対象に対するセンシングを行わせる、コンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体。
発明の詳細な説明
【技術分野】
【0001】
本明細書に開示される技術は、センサシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
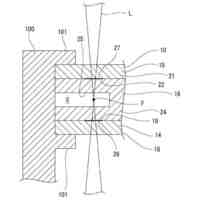
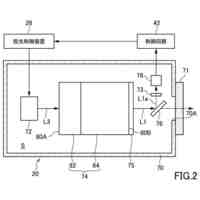
AD(Autonomous Driving:自動運転)やADAS(Advanced Driver-Assistance Systems:先進運転支援システム)の進展に伴い、車両の走行時における周囲環境の把握や自己位置推定に用いる測定装置の一つとして、LiDAR(Light Detection And Ranging)の開発研究が進められている。LiDARは、反射型センサを備える。反射型センサは、測定対象にレーザ光を投光(照射)し、レーザ光が測定対象に反射して戻ってくる反射光を受光する。LiDARは、反射型センサがレーザ光を出射した投光タイミングと反射光を受光した受光タイミングとの時間差に基づき測定対象までの距離を測定することにより測定対象に関する情報を出力する。
【0003】
移動体(例えば車両)には、例えば第1の反射型センサと第2の反射型のセンサとを備えるセンサシステムが配置される。第1の反射型センサの視野と第2の反射型センサの視野とは異なる。このため、例えば第2の反射型センサが故障等によりセンシングを正常に行えなくなった場合、第2の反射型センサの視野に対するセンシングを行うことができなくなる。そこで、従来から、補完的な視野を有する補完用のセンサを別途配置する技術が知られている。補完用のセンサは、第2の反射型センサの視野を補完する視野を有している。このため、仮に第2の反射型センサが故障等しても、補完用のセンサによって、第2の反射型センサの視野が補完される(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特表2022-512092号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来のセンサシステムでは、補完用のセンサを別途設ける必要があり、改良の余地があった。なお、このような課題は、移動体に配置されるセンサシステムに限らず、互いに視野が異なる複数の反射型センサを備えるセンサシステムに共通する課題である。
【0006】
本明細書では、上述した課題を解決することが可能な技術を開示する。
【課題を解決するための手段】
【0007】
本明細書に開示される技術は、例えば、以下の形態として実現することが可能である。
【0008】
(1)本明細書に開示されるセンサシステムは、第1の反射型センサと、第2の反射型センサと、コントローラと、を備える。前記コントローラは、前記第1の反射型センサの視野と前記第2の反射型センサの視野とが、第1の方向に互いに隣り合う第1の視野パターンで、前記第1の反射型センサによる検知結果と前記第2の反射型センサによる検知結果とに基づき、測定対象に対するセンシングを行い、所定の変更条件が満たされた場合、第2の視野パターンに設定する。第2の視野パターンは、前記第1の方向において、前記第1の反射型センサの視野中心の向きと視野角との少なくとも一方を変更し、変更後の前記第1の反射型センサの視野と、前記第1の視野パターンにおける前記第2の反射型センサの視野との重複領域を、前記第1の視野パターンよりも増大させたパターンである。前記コントローラは、前記第2の視野パターンで、前記第1の反射型センサによる検知結果に基づき、前記測定対象に対するセンシングを行う。本センサシステムによれば、所定の変更条件が満たされた場合、第1の反射型センサの視野中心の方向と視野角との少なくとも一方を変更し、第2の反射型センサの視野を補うことができる。
【0009】
(2)上記センサシステムにおいて、前記所定の変更条件には、前記コントローラが前記第2の反射型センサの異常を検知したことを含む構成としてもよい。本センサシステムによれば、第2の反射型センサに異常が発生した場合、第1の反射型センサの視野中心の方向と視野角との少なくとも一方を変更し、第2の反射型センサの視野を補うことができる。
【0010】
(3)上記センサシステムにおいて、前記コントローラは、前記第1の視野パターンに対して前記第1の反射型センサの視野角を広くして、前記第2の視野パターンに設定し、前記第1の視野パターンにおける前記第1の反射型センサの角度分解能は、前記第2の視野パターンにおける前記第1の反射型センサの角度分解能よりも高い構成としてもよい。本センサシステムによれば、例えば、第1の視野パターンにおける第1の反射型センサの角度分解能が、第2の視野パターン時と同じである場合に比べて、第1の視野パターンにおける第1の反射型センサのセンシング精度を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小糸製作所
車輌用灯具
10日前
株式会社小糸製作所
車両用灯具
3日前
株式会社小糸製作所
車両用灯具
25日前
株式会社小糸製作所
車両用灯具
25日前
株式会社小糸製作所
車両用前照灯
16日前
株式会社小糸製作所
回路基板および照明装置
4日前
株式会社小糸製作所
投光器、および、測定装置
10日前
株式会社小糸製作所
測定装置、測定装置の制御方法、測定装置の制御プログラム、および、コンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体
2日前
株式会社小糸製作所
測定装置、測定装置の制御方法、測定装置の制御プログラム、および、コンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体
2日前
株式会社小糸製作所
測定装置の制御方法、測定装置、測定装置の制御プログラム、および、コンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体
6日前
株式会社小糸製作所
センサシステム、移動体、センサシステムの制御方法、センサシステムの制御プログラム、および、コンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体
3日前
個人
カーテント
2か月前
個人
タイヤレバー
1か月前
個人
車窓用防虫網戸
3か月前
個人
前輪キャスター
6日前
個人
車輪清掃装置
3か月前
個人
タイヤ脱落防止構造
3日前
個人
ホイルのボルト締結
2か月前
個人
ルーフ付きトライク
23日前
井関農機株式会社
作業車両
2か月前
個人
車両通過構造物
1か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
1か月前
個人
キャンピングトライク
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
13日前
個人
キャンピングトレーラー
2か月前
個人
乗合路線バスの客室装置
1か月前
個人
ワイパーゴム性能保持具
3か月前
個人
車両用スリップ防止装置
2か月前
個人
アクセルのソフトウェア
2か月前
個人
円湾曲ホイール及び球体輪
1か月前
日本精機株式会社
車室演出装置
3日前
井関農機株式会社
収穫作業車両
3か月前
株式会社クラベ
ヒータユニット
3か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ