TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126387
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022522
出願日
2024-02-19
発明の名称
車両運転支援装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/16 20200101AFI20250822BHJP(車両一般)
要約
【課題】高速道路の本線の交通流を阻害せずに自車両が分岐路における自車両の走行安全性を確保することができる車両運転支援装置を提供する。
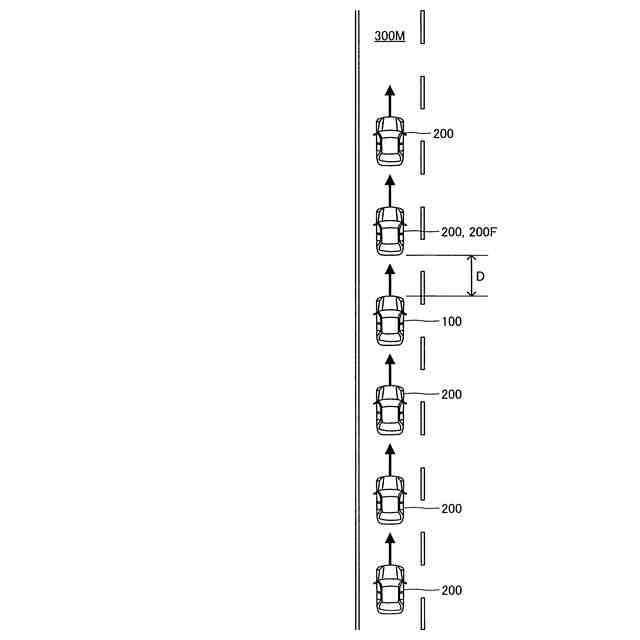
【解決手段】車両運転支援装置10は、先行車200Fに追従するように自車両100を自動で走行させる追従走行制御を実行する。車両運転支援装置は、自車両が高速道路300の本線300Mを走行しているときに追従走行制御を終了した場合、自車両と先行車との間の車間距離を自動で増大させる離間制御を実行する。車両運転支援装置は、自車両が所定時間以内に高速道路の本線から当該高速道路の分岐路300Bに進入することが判明しているときに追従走行制御を終了する場合において、先行車が分岐路に進入した場合、自車両が分岐路に進入した後に離間制御を実行する。
【選択図】 図3
特許請求の範囲
【請求項1】
先行車に追従するように自車両を自動で走行させる追従走行制御を実行する制御装置を備え、
前記制御装置は、前記自車両が高速道路の本線を走行しているときに前記追従走行制御を終了した場合、前記自車両と前記先行車との間の車間距離を自動で増大させる離間制御を実行するように構成されている、
車両運転支援装置において、
前記制御装置は、前記自車両が所定時間以内に前記高速道路の本線から当該高速道路の分岐路に進入することが判明しているときに前記追従走行制御を終了する場合において、前記先行車が前記分岐路に進入した場合、前記自車両が前記分岐路に進入した後に前記離間制御を実行するように構成されている、
車両運転支援装置。
続きを表示(約 390 文字)
【請求項2】
請求項1に記載の車両運転支援装置において、
前記制御装置は、
前記自車両の運転者が設定した目的地までの目標走行ルートを作成し、
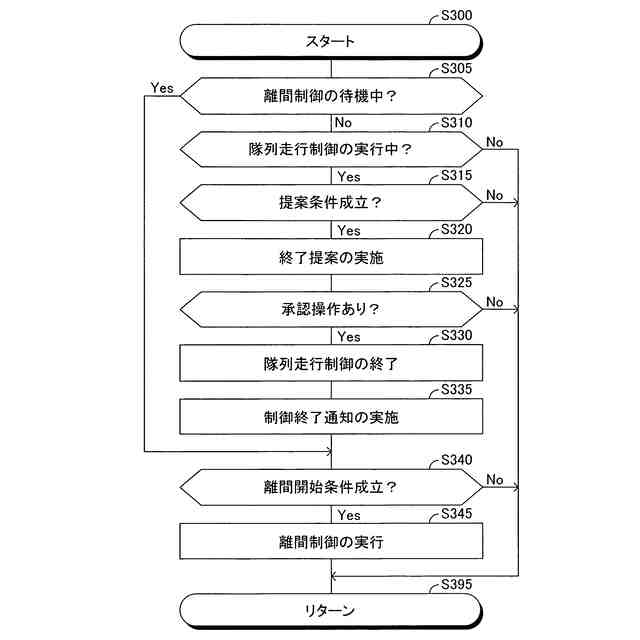
前記目標走行ルートに基づいて前記自車両が前記所定時間以内に前記高速道路の本線から当該高速道路の分岐路に進入することが判明した場合、前記追従走行制御を終了することを前記運転者に提案する終了提案を行い、
前記終了提案を承認する承認操作を前記運転者が行った場合、前記追従走行制御を終了する、
ように構成されている、
車両運転支援装置。
【請求項3】
請求項1又は請求項2に記載の車両運転支援装置において、
前記追従走行制御は、前記自車両を含む複数の車両が同一車線内で列をなして走行するように前記自車両を自動で走行させる隊列走行制御である、
車両運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両運転支援装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
複数の車両に隊列を組ませて各車両を自動で走行させる車両運転支援装置が知られている。又、こうした車両運転支援装置として、隊列からの自車両の離脱が完了するまでの間、自車両の走行安全性を確保するために、隊列における自車両の直前の車両(追従先行車)と自車両との間の車間距離を自動で増大させるように構成された車両運転支援装置も知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2001-273588号公報
【発明の概要】
【0004】
ところで、自車両が他車両と隊列を組んで自動で高速道路の本線を走行されているときに、当該自車両が高速道路の分岐路に進入するために隊列から離脱する場面がある。このとき、追従先行車も同じ分岐路に進入しようとして分岐路の手前で減速することがある。このとき、自車両の走行安全性を確保するために、自車両と追従先行車との間の車間距離が自動で増大されると、自車両が大きく減速することになり、その結果、高速道路の本線における交通流を阻害してしまう可能性がある。こうした可能性は、自車両が先行車に追従するように自動で高速道路の本線を走行しているときにも存在する。
【0005】
本発明の目的は、高速道路の本線の交通流を阻害せずに自車両が分岐路における自車両の走行安全性を確保することができる車両運転支援装置を提供することにある。
【0006】
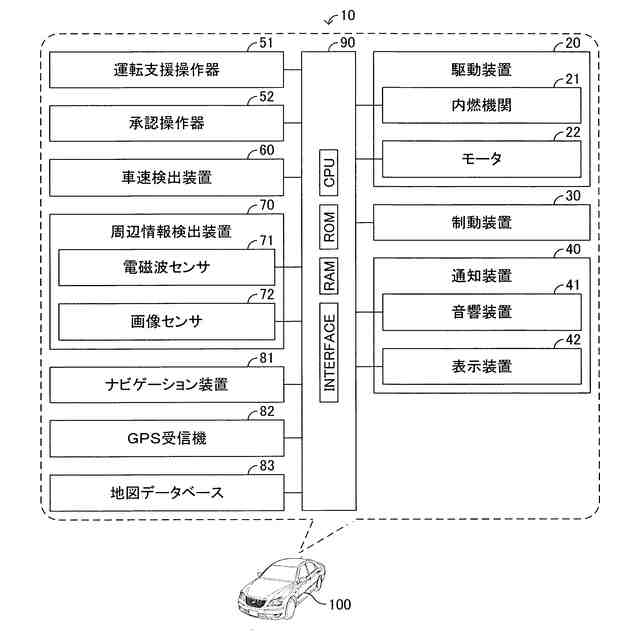
本発明に係る車両運転支援装置は、先行車に追従するように自車両を自動で走行させる追従走行制御を実行する制御装置を備えている。前記制御装置は、前記自車両が高速道路の本線を走行しているときに前記追従走行制御を終了した場合、前記自車両と前記先行車との間の車間距離を自動で増大させる離間制御を実行するように構成されている。そして、前記制御装置は、前記自車両が所定時間以内に前記高速道路の本線から当該高速道路の分岐路に進入することが判明しているときに前記追従走行制御を終了する場合において、前記先行車が前記分岐路に進入した場合、前記自車両が前記分岐路に進入した後に前記離間制御を実行するように構成されている。
【0007】
自車両が追従走行制御により高速道路の本線を走行されているときに、当該自車両が高速道路の分岐路に進入する場面がある。このとき、先行車も同じ分岐路に進入しようとして分岐路の手前で減速することがある。このとき、自車両の走行安全性を確保するために、車間距離が自動で増大されると、自車両が大きく減速することになり、その結果、高速道路の本線における交通流を阻害してしまう可能性がある。
【0008】
本発明に係る車両運転支援装置によれば、自車両が分岐路に進入した後に車間距離が増大される。従って、自車両が高速道路の本線を走行しているときには、車間距離の増大は行われない。このため、高速道路の本線における交通流を阻害せずに分岐路における自車両の走行安全性を確保することができる。
【0009】
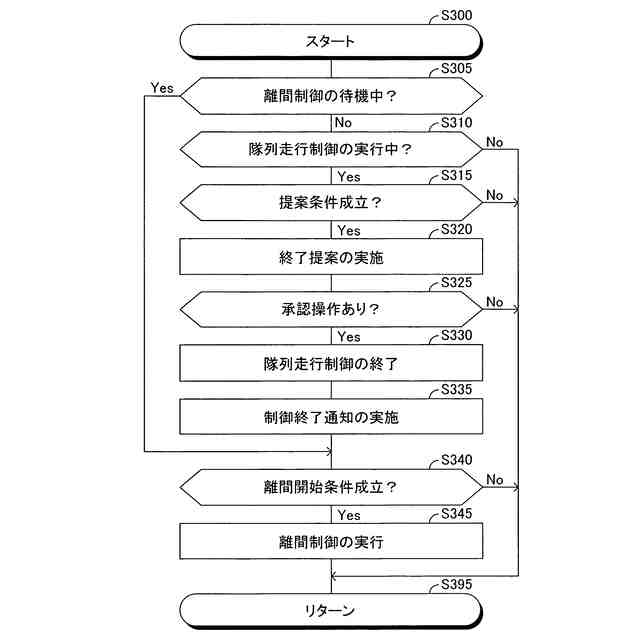
尚、本発明に係る車両運転支援装置において、前記制御装置は、前記自車両の運転者が設定した目的地までの目標走行ルートを作成し、前記目標走行ルートに基づいて前記自車両が前記所定時間以内に前記高速道路の本線から当該高速道路の分岐路に進入することが判明した場合、前記追従走行制御を終了することを前記運転者に提案する終了提案を行い、前記終了提案を承認する承認操作を前記運転者が行った場合、前記追従走行制御を終了するように構成され得る。
【0010】
本発明に係る車両運転支援装置によれば、目標走行ルートに基づいて自車両が所定時間以内に高速道路の本線から分岐路に進入することが判明した場合、追従走行制御を終了することが提案される。このため、運転者は、適切なタイミングで、追従走行制御を終了させる必要があることを知ることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
電動車
8日前
トヨタ自動車株式会社
負極層
8日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
モータ
12日前
トヨタ自動車株式会社
ロータ
12日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
モータ
12日前
トヨタ自動車株式会社
報知装置
5日前
トヨタ自動車株式会社
給電装置
5日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
駆動装置
8日前
トヨタ自動車株式会社
内燃機関
4日前
トヨタ自動車株式会社
充電装置
8日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
スペーサ
5日前
トヨタ自動車株式会社
路側装置
8日前
トヨタ自動車株式会社
蓄電装置
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ