TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126398
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022538
出願日
2024-02-19
発明の名称
車両の制御装置、車両の制御方法及びコンピュータプログラム
出願人
株式会社SUBARU
代理人
弁理士法人太田特許事務所
主分類
B60W
30/02 20120101AFI20250822BHJP(車両一般)
要約
【課題】トラクション制御中の車体の挙動を安定化可能な改良された車両の制御装置を提供する。
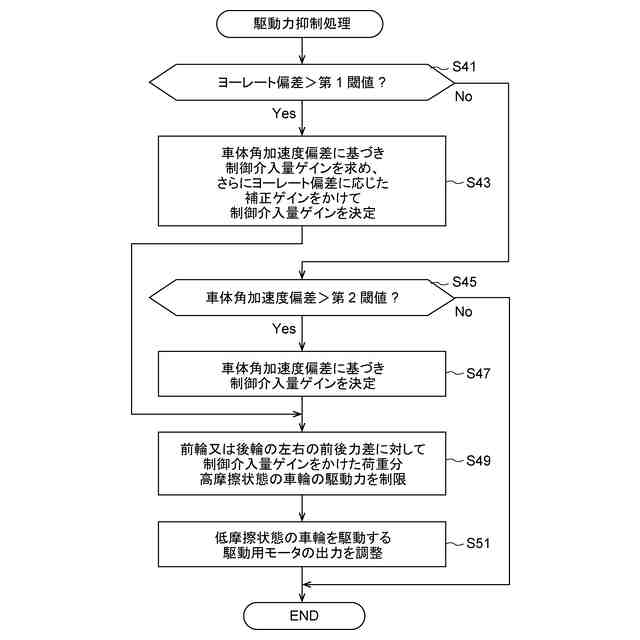
【解決手段】トラクション制御を実行する車両の制御装置は、トラクション制御中に目標ヨーレート及び目標車体角加速度を設定することと、トラクション制御中にタイヤ力センサにより検出される各車輪の前後力に基づいて、左右の車輪の前後力差を算出することと、左右の車輪の前後力差に基づいて実ヨーレート及び実車体角加速度を算出することと、目標ヨーレートと実ヨーレートとの差であるヨーレート偏差が所定の第1閾値を超えるか、又は、目標車体角加速度と実車体角加速度との差である車体角加速度偏差が所定の第2閾値を超える場合に、左右の車輪のうち前後力が大きい車輪に付与する駆動力を抑制し、ヨーレート偏差及び車体角加速度偏差を所定の範囲内とすることと、を実行する。
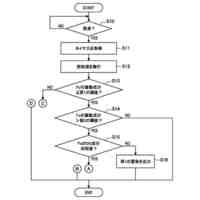
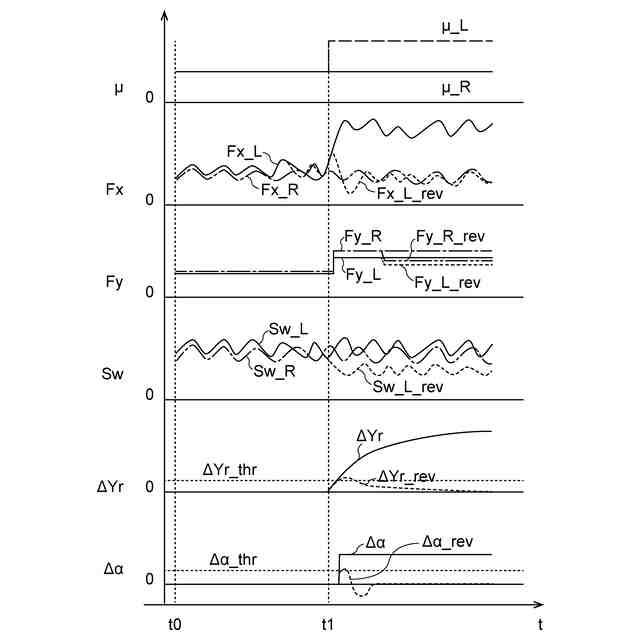
【選択図】図5
特許請求の範囲
【請求項1】
トラクション制御を実行する車両の制御装置において、
一つ又は複数のプロセッサと、前記一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、
前記一つ又は複数のプロセッサは、
前記トラクション制御中に目標ヨーレート及び目標車体角加速度を設定することと、
前記トラクション制御中にタイヤ力センサにより検出される各車輪の前後力に基づいて、左右の車輪の前後力差を算出することと、
前記左右の車輪の前後力差に基づいて実ヨーレート及び実車体角加速度を算出することと、
前記目標ヨーレートと前記実ヨーレートとの差であるヨーレート偏差が所定の第1閾値を超えるか、又は、前記目標車体角加速度と前記実車体角加速度との差である車体角加速度偏差が所定の第2閾値を超える場合に、前記左右の車輪のうち前記前後力が大きい車輪に付与する駆動力を抑制し、前記ヨーレート偏差及び前記車体角加速度偏差を所定の範囲内とすることと、
を実行する、車両の制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記一つ又は複数のプロセッサは、
前記ヨーレート偏差が前記所定の第1閾値を超える場合、前記ヨーレート偏差の値及び前記車体角加速度偏差の値に基づいて前記駆動力の抑制量を設定する、
請求項1に記載の車両の制御装置。
【請求項3】
前記一つ又は複数のプロセッサは、
前記ヨーレート偏差が前記所定の第1閾値以下、かつ、前記車体角加速度偏差が前記所定の第2閾値を超える場合、前記車体角加速度偏差の値に基づいて前記駆動力の抑制量を設定する、
請求項1に記載の車両の制御装置。
【請求項4】
前記一つ又は複数のプロセッサは、
前記ヨーレート偏差及び前記車体角加速度偏差を所定の範囲内とした後、さらに左右の後輪の横力が上昇傾向となった場合に、前記前後力が大きい車輪に付与する前記駆動力を抑制することを停止する、
請求項1に記載の車両の制御装置。
【請求項5】
コンピュータが、
トラクション制御中に目標ヨーレート及び目標車体角加速度を設定することと、
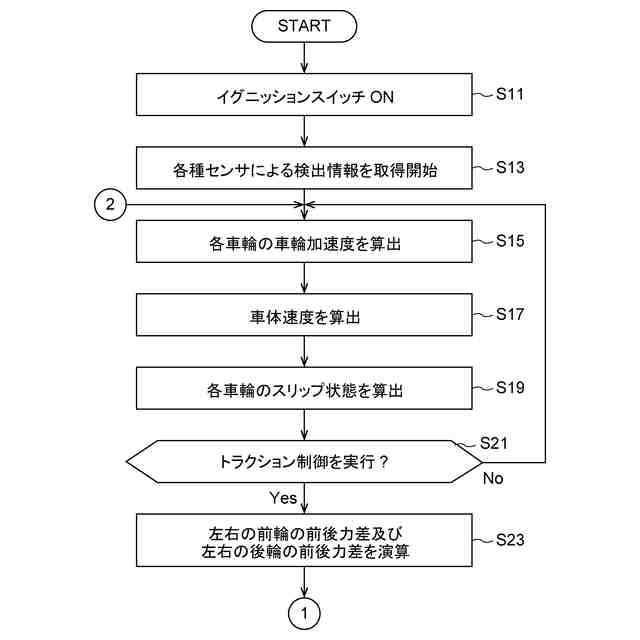
前記トラクション制御中にタイヤ力センサにより検出される各車輪の前後力に基づいて、左右の前輪の前後力差及び左右の後輪の前後力差を算出することと、
前記左右の前輪の前後力差及び左右の後輪の前後力差に基づいてヨーレート及び車体角加速度を算出することと、
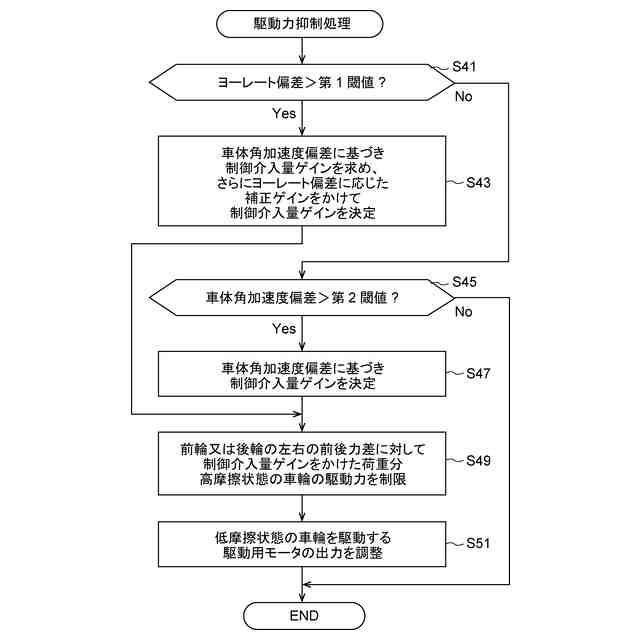
前記目標ヨーレートと前記ヨーレートとの差であるヨーレート偏差が所定の第1閾値以上であるか、又は、前記目標車体角加速度と前記車体角加速度との差である車体角加速度偏差が所定の第2閾値以上である場合に、前記前輪及び前記後輪のうち前記前後力が大きい車輪に付与する駆動力を抑制し、前記ヨーレート偏差及び前記車体角加速度偏差を所定の範囲内とすることと、
を実行する、車両の制御方法。
【請求項6】
コンピュータに、
トラクション制御中に目標ヨーレート及び目標車体角加速度を設定することと、
前記トラクション制御中にタイヤ力センサにより検出される各車輪の横力に基づいて、左右の前輪の横力差及び左右の後輪の横力差を算出することと、
前記左右の前輪の横力差及び左右の後輪の横力差に基づいてヨーレート及び車体角加速度を算出することと、
前記目標ヨーレートと前記ヨーレートとの差であるヨーレート偏差が所定の第1閾値以上であるか、又は、前記目標車体角加速度と前記車体角加速度との差である車体角加速度偏差が所定の第2閾値以上である場合に、前記前輪及び前記後輪のうちの前記前後力が大きい車輪に付与する前記駆動力を抑制し、前記ヨーレート偏差及び前記車体角加速度偏差を所定の範囲内とすることと、
を実行させる、コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の制御装置、車両の制御方法及びコンピュータプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
車両の発進時等の加速時における車輪の空転を防止するトラクションコントロールシステム(以下、「TCS」ともいう)が知られている。TCSは、例えばタイヤと路面との摩擦係数が低い低摩擦状態でアクセルペダルを強く踏み込んだ場合に、車輪の空転を検知すると駆動力を低下させ、車輪の回転数が低下し始めると再び駆動力を増大させる処理を繰り返し、各車輪に最大限の駆動力を発揮させる。
【0003】
TCSによるトラクション制御中においては、タイヤのスリップ率の上限及び下限が設定され、スリップ率が上限及び下限の範囲内に収まるように駆動力の制御が行われる。このため、駆動力が一定で摩擦係数が低い路面から高い路面へ切り替わると、スリップ率が低下し、トラクション制御が介入することによりスリップ率が低下するために駆動力が増大される。
【先行技術文献】
【特許文献】
【0004】
特開2020-199823号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、加速時において、左右の車輪のうちの一輪のみが低摩擦状態から高摩擦状態に変化すると、当該車輪の駆動力が増大して左右の駆動力差が生じ、車体にヨーモーメントが発生する。低摩擦状態においては、タイヤのスリップ角が大きく変化しない限りタイヤの幅方向の力(横力)が上昇しないため、車体の挙動が乱れやすい。
【0006】
本開示は、上記問題に鑑みてなされたものであり、本開示の目的とするところは、トラクション制御中の車体の挙動を安定化可能な改良された車両の制御装置、車両の制御方法及びコンピュータプログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本開示のある観点によれば、トラクション制御を実行する車両の制御装置において、一つ又は複数のプロセッサと、上記一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、上記一つ又は複数のプロセッサは、上記トラクション制御中に目標ヨーレート及び目標車体角加速度を設定することと、上記トラクション制御中にタイヤ力センサにより検出される各車輪の前後力に基づいて、左右の車輪の前後力差を算出することと、上記左右の車輪の前後力差に基づいて実ヨーレート及び実車体角加速度を算出することと、上記目標ヨーレートと上記実ヨーレートとの差であるヨーレート偏差が所定の第1閾値を超えるか、又は、上記目標車体角加速度と上記実車体角加速度との差である車体角加速度偏差が所定の第2閾値を超える場合に、上記左右の車輪のうち上記前後力が大きい車輪に付与する駆動力を抑制し、上記ヨーレート偏差及び上記車体角加速度偏差を所定の範囲内とすることと、を実行する車両の制御装置が提供される。
【0008】
また、上記課題を解決するために本開示の別の観点によれば、コンピュータが、トラクション制御中に目標ヨーレート及び目標車体角加速度を設定することと、上記トラクション制御中にタイヤ力センサにより検出される各車輪の前後力に基づいて、左右の前輪の前後力差及び左右の後輪の前後力差を算出することと、上記左右の前輪の前後力差及び左右の後輪の前後力差に基づいてヨーレート及び車体角加速度を算出することと、上記目標ヨーレートと上記ヨーレートとの差であるヨーレート偏差が所定の第1閾値以上であるか、又は、上記目標車体角加速度と上記車体角加速度との差である車体角加速度偏差が所定の第2閾値以上である場合に、上記前輪及び上記後輪のうち上記前後力が大きい車輪に付与する駆動力を抑制し、上記ヨーレート偏差及び上記車体角加速度偏差を所定の範囲内とすることと、を実行する車両の制御方法が提供される。
【0009】
また、上記課題を解決するために本開示の別の観点によれば、コンピュータに、トラクション制御中に目標ヨーレート及び目標車体角加速度を設定することと、上記トラクション制御中にタイヤ力センサにより検出される各車輪の横力に基づいて、左右の前輪の横力差及び左右の後輪の横力差を算出することと、上記左右の前輪の横力差及び左右の後輪の横力差に基づいてヨーレート及び車体角加速度を算出することと、上記目標ヨーレートと上記ヨーレートとの差であるヨーレート偏差が所定の第1閾値以上であるか、又は、上記目標車体角加速度と上記車体角加速度との差である車体角加速度偏差が所定の第2閾値以上である場合に、上記前輪及び上記後輪のうちの上記前後力が大きい車輪に付与する上記駆動力を抑制し、上記ヨーレート偏差及び上記車体角加速度偏差を所定の範囲内とすることと、を実行させるコンピュータプログラムが提供される。
【発明の効果】
【0010】
以上説明したように本開示によれば、トラクション制御中の車体の挙動を安定化させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SUBARU
車両
4日前
株式会社SUBARU
車両
4日前
株式会社SUBARU
潤滑構造
18日前
株式会社SUBARU
判定装置
1日前
株式会社SUBARU
エンジン
24日前
株式会社SUBARU
エンジン
3日前
株式会社SUBARU
容器ホルダ
24日前
株式会社SUBARU
運転支援装置
12日前
株式会社SUBARU
運転支援装置
1日前
株式会社SUBARU
運転支援装置
1日前
株式会社SUBARU
情報提示装置
10日前
株式会社SUBARU
車両用制御装置
1日前
株式会社SUBARU
車両用保護装置
1日前
株式会社SUBARU
通気管端部構造
18日前
株式会社SUBARU
車両用警告装置
22日前
株式会社SUBARU
車両用制御装置
23日前
株式会社SUBARU
車両用制御装置
5日前
株式会社SUBARU
エンジンシステム
18日前
株式会社SUBARU
車両の乗員保護装置
24日前
株式会社SUBARU
アーチガーニッシュ
17日前
株式会社SUBARU
車両の手動運転支援装置
22日前
株式会社SUBARU
車両用サッシュドア構造
5日前
株式会社SUBARU
可変バルブタイミング機構
8日前
株式会社SUBARU
車両用フェンダカバー構造
3日前
株式会社SUBARU
車両用バッテリ監視システム
24日前
株式会社SUBARU
車体用長尺パネル及び車体構造
3日前
株式会社SUBARU
ストレス検出装置およびストレス検出方法
1日前
株式会社SUBARU
乗員誘導機能を有する車両のリアゲートの自動開閉装置
4日前
株式会社SUBARU
オイルパイプ組付け用治具、及びオイルパイプの組付け方法
23日前
株式会社SUBARU
車両の制御装置、車両の制御方法及びコンピュータプログラム
1日前
株式会社SUBARU
インシュレータ、及び、インジェクタの振動伝播低減取付構造
1日前
株式会社SUBARU
車両の制動制御装置、車両の制動制御方法及びコンピュータプログラム
1日前
株式会社SUBARU
車両の制動制御装置、車両の制動制御方法及びコンピュータプログラム
1日前
個人
カーテント
2か月前
個人
タイヤレバー
1か月前
個人
警告装置
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ