TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126711
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024023095
出願日
2024-02-19
発明の名称
非接触電力伝送システム、送電装置及び移動体
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
H02J
50/90 20160101AFI20250822BHJP(電力の発電,変換,配電)
要約
【課題】複数の異なる移動体に対して適正な電力伝送を行うことができる非接触電力伝送システム、送電装置及び移動体を提供する。
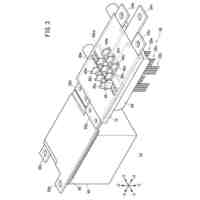
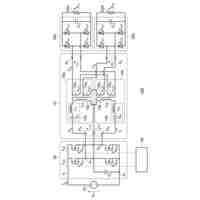
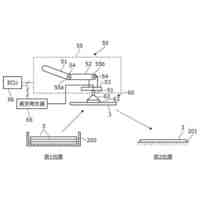
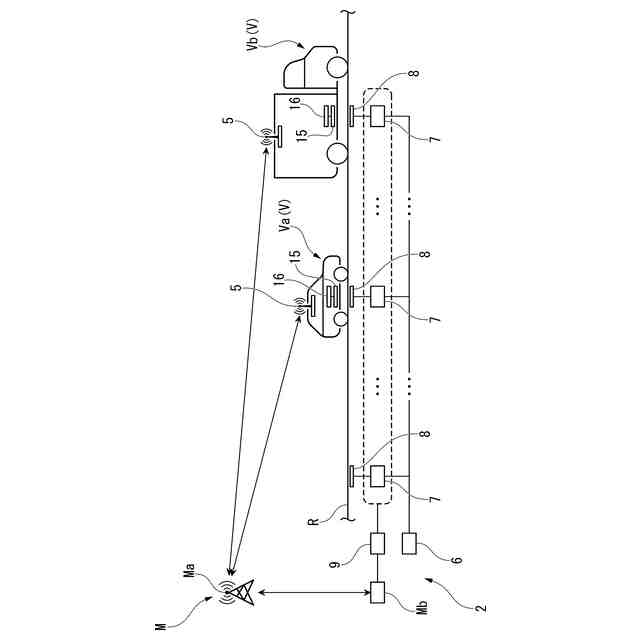
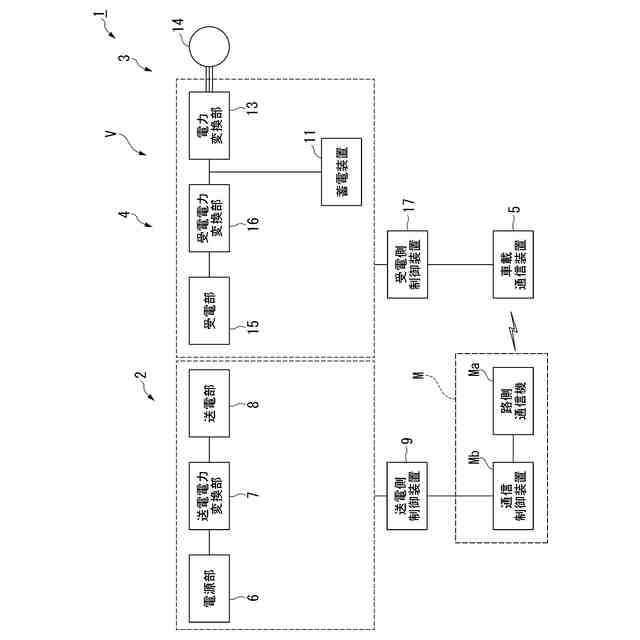
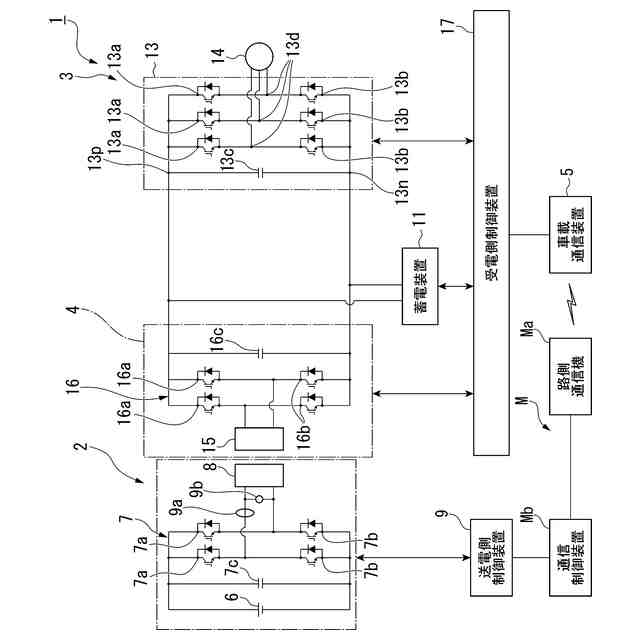
【解決手段】非接触電力伝送システム1は、送電部8と、送電電力変換部7と、送電側制御装置9とを備える。送電部8は、受電装置4に非接触で伝送される交流電力を送り出す一次側コイル8aを備える。送電電力変換部7は、一次側コイル8aに接続される複数のトランジスタ7a,7bを備える。送電電力変換部7は、電源部6から供給される直流電力を交流電力に変換する。送電側制御装置9は、送電部8による送電開始初期の伝送電力を所定電力未満に設定する。送電側制御装置9は、送電部8による送電開始からの時間経過に応じて伝送電力を所定電力に向かって増大傾向に変化させる。
【選択図】図2
特許請求の範囲
【請求項1】
移動体に搭載される受電側コイル、受電側通信装置及び受電側制御装置と、
前記移動体の移動路に配置される少なくとも1つの送電側コイルと送電側通信装置及び送電側制御装置とを有する送電装置と
を備え、
前記受電側通信装置及び前記送電側通信装置は、前記受電側コイル及び前記送電側コイルの結合度合いが所定度合い以上に到達するより前に、無線の第1通信によって第1情報を授受し、
前記受電側コイルは、前記受電側通信装置と前記送電側通信装置との前記第1通信の後又は前記受電側コイル及び前記送電側コイル同士が所定距離以内である場合に、磁界結合の誘起電圧による第2通信で第2情報を前記送電側コイルに送信し、
前記送電側コイルは、前記受電側コイルとの前記第2通信の後に、電力を非接触で前記受電側コイルに伝送し、
前記受電側制御装置及び前記送電側制御装置は、前記第1情報及び前記第2情報の通信を制御するとともに、前記第1情報及び前記第2情報に基づいて前記受電側コイルと前記送電側コイルとの間の非接触での電力伝送を制御する
非接触電力伝送システム。
続きを表示(約 2,800 文字)
【請求項2】
前記受電側通信装置から前記送電側通信装置に送信される前記第1情報は、少なくとも電力伝送に関する情報を備え、
前記送電側通信装置から前記受電側通信装置に送信される前記第1情報は、少なくとも鍵情報を備え、
前記第2情報は、少なくとも前記鍵情報を備える
請求項1に記載の非接触電力伝送システム。
【請求項3】
前記送電装置は、少なくとも1つの前記送電側コイルの各々に接続されて、電源から供給される電力を独立的に変換する少なくとも1つの送電側電力変換部を備え、
前記送電側制御装置は、前記鍵情報と前記電力伝送に関する情報との組み合わせに基づき、少なくとも1つの前記送電側コイルの各々が前記受電側コイルから受信する前記鍵情報に対応付けられる前記電力伝送に関する情報に応じて、少なくとも1つの前記送電側コイルの各々による非接触での電力伝送を独立的に制御する
請求項2に記載の非接触電力伝送システム。
【請求項4】
前記送電側制御装置は、
前記送電側通信装置から前記受電側通信装置に前記鍵情報を送信した後に、前記送電側電力変換部を停止状態から前記第2情報の受信待機状態へと移行させ、
前記送電側コイルが前記受電側コイルから受信した前記鍵情報の照合が完了した後に、前記送電側電力変換部を前記受信待機状態から前記結合度合いの推定のために電圧パルスを出力する探索状態へと移行させ、
前記探索状態で前記結合度合いが所定閾度合い以上に到達する場合に前記送電側電力変換部を送電制御状態に移行させるとともに、前記探索状態で前記結合度合いが前記所定閾度合い以上に到達しない場合に前記送電側電力変換部を前記受信待機状態へと移行させる
請求項3に記載の非接触電力伝送システム。
【請求項5】
前記移動体に搭載されて前記受電側コイルに接続される受電側電力変換部を備え、
前記受電側制御装置は、
前記受電側通信装置が前記送電側通信装置から前記鍵情報を受信した後に、前記受電側電力変換部を前記受電側コイルの短絡状態から前記第2情報の送信状態へと移行させ、
前記第2情報の送信後に、前記受電側電力変換部を前記送信状態から電力の受電待機状態へ移行させ、
前記受電待機状態で受電電力が所定時間以内に所定電力以上に到達する場合に前記受電側電力変換部を受電制御状態に移行させるとともに、前記受電待機状態で受電電力が前記所定時間以内に前記所定電力以上に到達しない場合に前記受電側電力変換部を前記送信状態へと移行させる
請求項4に記載の非接触電力伝送システム。
【請求項6】
移動体の移動路に配置されるとともに、前記移動体に搭載される受電側コイルに電力を非接触で伝送する少なくとも1つの送電側コイルと、
前記送電側コイル及び前記受電側コイルの結合度合いが所定度合い以上に到達するより前に、前記移動体に搭載される受電側通信装置との間の無線の第1通信によって第1情報を授受する送電側通信装置と、
前記受電側コイルと前記送電側コイルとの間の磁界結合の誘起電圧による第2通信で前記送電側コイルが受け取る第2情報と、前記第1情報とに基づいて、前記受電側コイルと前記送電側コイルとの間の非接触での電力伝送を制御する送電側制御装置と
を備える
送電装置。
【請求項7】
少なくとも1つの前記送電側コイルの各々に接続されて、電源から供給される電力を独立的に変換する少なくとも1つの送電側電力変換部を備え、
前記送電側通信装置が前記受電側通信装置から受信する前記第1情報は、少なくとも電力伝送に関する情報を備え、
前記送電側通信装置が前記受電側通信装置に送信する前記第1情報は、少なくとも鍵情報を備え、
前記第2情報は、少なくとも前記鍵情報を備え、
前記送電側制御装置は、前記鍵情報と前記電力伝送に関する情報との組み合わせに基づき、少なくとも1つの前記送電側コイルの各々が前記受電側コイルから受信する前記鍵情報に対応付けられる前記電力伝送に関する情報に応じて、少なくとも1つの前記送電側コイルの各々による非接触での電力伝送を独立的に制御する
請求項6に記載の送電装置。
【請求項8】
前記送電側制御装置は、
前記送電側通信装置から前記受電側通信装置に前記鍵情報を送信した後に、前記送電側電力変換部を停止状態から前記第2情報の受信待機状態へと移行させ、
前記送電側コイルが前記受電側コイルから受信した前記鍵情報の照合が完了した後に、前記送電側電力変換部を前記受信待機状態から前記結合度合いの推定のために電圧パルスを出力する探索状態へと移行させ、
前記探索状態で前記結合度合いが所定閾度合い以上に到達する場合に前記送電側電力変換部を送電制御状態に移行させるとともに、前記探索状態で前記結合度合いが前記所定閾度合い以上に到達しない場合に前記送電側電力変換部を前記受信待機状態へと移行させる
請求項7に記載の送電装置。
【請求項9】
送電側コイルから非接触で伝送される電力を受け取る受電側コイルと、
前記送電側コイル及び前記受電側コイルの結合度合いが所定度合い以上に到達するより前に、送電装置に備えられる送電側通信装置との間の無線の第1通信によって第1情報を授受する受電側通信装置と、
前記受電側コイルと前記送電側コイルとの間の磁界結合の誘起電圧による第2通信で第2情報を前記送電側コイルに送信する受電側制御装置と
を備える
移動体。
【請求項10】
前記受電側コイルに接続される受電側電力変換部を備え、
前記受電側通信装置が前記送電側通信装置に送信する前記第1情報は、少なくとも電力伝送に関する情報を備え、
前記受電側通信装置が前記送電側通信装置から受信する前記第1情報は、少なくとも鍵情報を備え、
前記第2情報は、少なくとも前記鍵情報を備え、
前記受電側制御装置は、
前記受電側通信装置が前記送電側通信装置から前記鍵情報を受信した後に、前記受電側電力変換部を前記受電側コイルの短絡状態から前記第2情報の送信状態へと移行させ、
前記第2情報の送信後に、前記受電側電力変換部を前記送信状態から電力の受電待機状態へ移行させ、
前記受電待機状態で受電電力が所定時間以内に所定電力以上に到達する場合に前記受電側電力変換部を受電制御状態に移行させるとともに、前記受電待機状態で受電電力が前記所定時間以内に前記所定電力以上に到達しない場合に前記受電側電力変換部を前記送信状態へと移行させる
請求項9に記載の移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、非接触電力伝送システム、送電装置及び移動体に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
近年、より多くの人々が手ごろで信頼でき、持続可能かつ先進的なエネルギーへのアクセスを確保できるようにするため、エネルギーの効率化に貢献する二次電池を搭載する車両での充給電に関する研究開発が行われている。
従来、非接触での電力伝送により送電側から受電側に電力を供給する非接触電力伝送システムでは、受電側から送電側に送信される情報に基づき、送電側による受電側の識別及び受電側の要求電力に応じた電力伝送を行うシステムが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-393号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
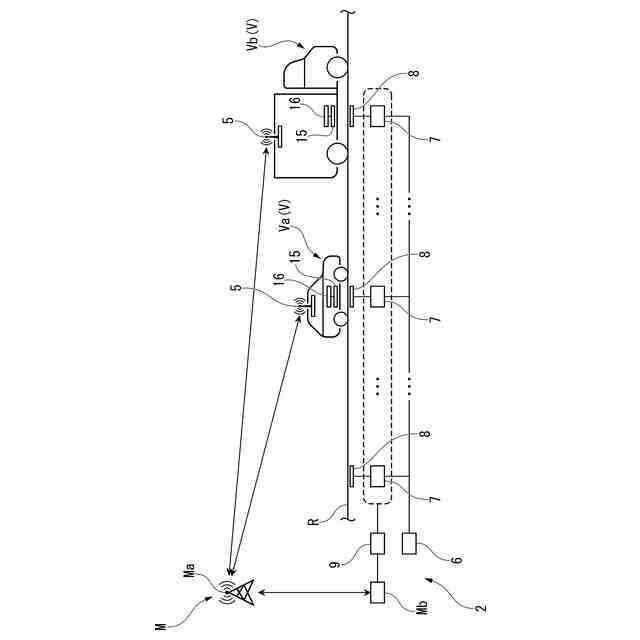
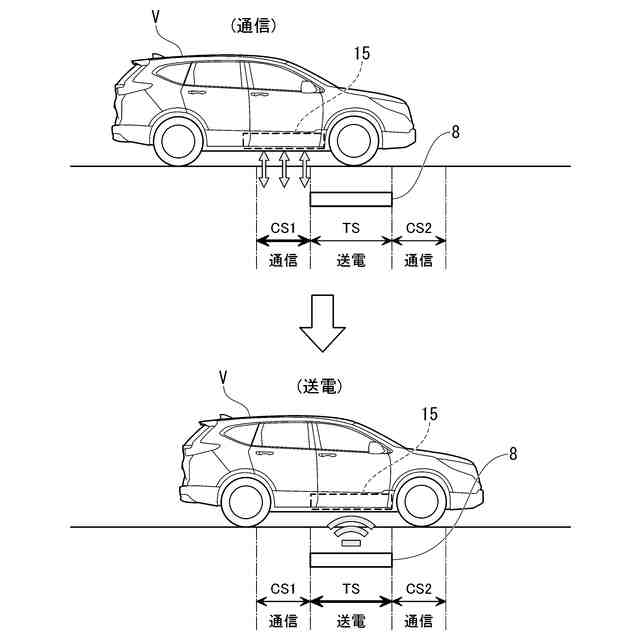
ところで、二次電池を搭載する車両での充給電に関する技術において、走行中の車両に対する非接触での電力伝送では、複数の走行車両の各々に対して、迅速に正確な車両識別を行うとともに、要求電力に応じた適正な電力伝送を行うことが望まれている。例えば、走行路に設置される送電側コイルから給電を受ける走行車両の場合、数十ms程度の極短時間の間に、送電側と受電側との間の通信を確立して要求電力に応じた電力伝送を完了することが望まれる。また、例えば、要求電力が異なる複数の走行車両が存在して、車間距離の狭まり及び割り込みが発生する混合交通の環境下等であっても、複数の走行車両の各々に同時を含む適切なタイミングで電力伝送を行うことが望まれている。
しかしながら、例えば上記従来技術のシステムでは、車両及び地上給電装置の各々は、受電装置又は送電装置に加えて、広域無線通信及び狭域無線通信の2つの異なる専用の無線通信装置を必要とすることによって、システム構成が煩雑になるという問題が生じる。また、例えば、給電開始の直前で車両識別を行うための狭域無線通信において、極短時間での通信が安定しない又は通信確立が成立しない場合には、電力伝送の不成立又は過剰な給電等の異常が生じるおそれがある。
【0005】
本発明は、複数の異なる移動体に対して適正な電力伝送を行うことができる非接触電力伝送システム、送電装置及び移動体を提供することを目的とする。そして、延いてはエネルギーの効率化に寄与するものである。
【課題を解決するための手段】
【0006】
上記課題を解決して係る目的を達成するために、本発明は以下の態様を採用した。
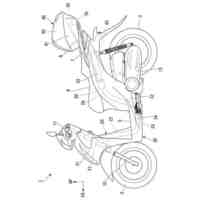
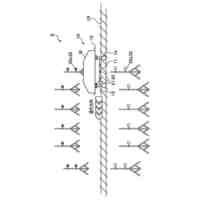
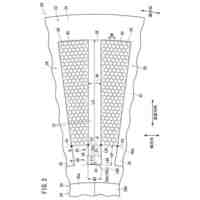
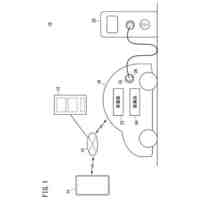
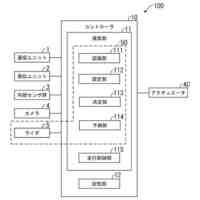
(1):本発明の一態様に係る非接触電力伝送システム(例えば、実施形態での非接触電力伝送システム1)は、移動体(例えば、実施形態での車両V)に搭載される受電側コイル(例えば、実施形態での二次側コイル15a)、受電側通信装置(例えば、実施形態での車載通信装置5)及び受電側制御装置(例えば、実施形態での受電側制御装置17)と、前記移動体の移動路(例えば、実施形態での走行路R)に配置される少なくとも1つの送電側コイル(例えば、実施形態での一次側コイル8a)と送電側通信装置(例えば、実施形態での通信システムM)及び送電側制御装置(例えば、実施形態での送電側制御装置9)とを有する送電装置(例えば、実施形態での送電装置2)とを備え、前記受電側通信装置及び前記送電側通信装置は、前記受電側コイル及び前記送電側コイルの結合度合いが所定度合い以上に到達するより前に、無線の第1通信によって第1情報を授受し、前記受電側コイルは、前記受電側通信装置と前記送電側通信装置との前記第1通信の後又は前記受電側コイル及び前記送電側コイル同士が所定距離以内である場合に、磁界結合の誘起電圧による第2通信で第2情報を前記送電側コイルに送信し、前記送電側コイルは、前記受電側コイルとの前記第2通信の後に、電力を非接触で前記受電側コイルに伝送し、前記受電側制御装置及び前記送電側制御装置は、前記第1情報及び前記第2情報の通信を制御するとともに、前記第1情報及び前記第2情報に基づいて前記受電側コイルと前記送電側コイルとの間の非接触での電力伝送を制御する。
【0007】
(2):上記(1)に記載の非接触電力伝送システムでは、前記受電側通信装置から前記送電側通信装置に送信される前記第1情報は、少なくとも電力伝送に関する情報を備え、前記送電側通信装置から前記受電側通信装置に送信される前記第1情報は、少なくとも鍵情報を備え、前記第2情報は、少なくとも前記鍵情報を備えてもよい。
【0008】
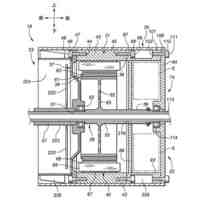
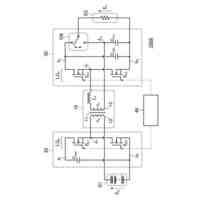
(3):上記(2)に記載の非接触電力伝送システムでは、前記送電装置は、少なくとも1つの前記送電側コイルの各々に接続されて、電源(例えば、実施形態での電源部6)から供給される電力を独立的に変換する少なくとも1つの送電側電力変換部(例えば、実施形態での送電電力変換部7)を備え、前記送電側制御装置は、前記鍵情報と前記電力伝送に関する情報との組み合わせに基づき、少なくとも1つの前記送電側コイルの各々が前記受電側コイルから受信する前記鍵情報に対応付けられる前記電力伝送に関する情報に応じて、少なくとも1つの前記送電側コイルの各々による非接触での電力伝送を独立的に制御してもよい。
【0009】
(4):上記(3)に記載の非接触電力伝送システムでは、前記送電側制御装置は、前記送電側通信装置から前記受電側通信装置に前記鍵情報を送信した後に、前記送電側電力変換部を停止状態から前記第2情報の受信待機状態へと移行させ、前記送電側コイルが前記受電側コイルから受信した前記鍵情報の照合が完了した後に、前記送電側電力変換部を前記受信待機状態から前記結合度合いの推定のために電圧パルスを出力する探索状態へと移行させ、前記探索状態で前記結合度合いが所定閾度合い以上に到達する場合に前記送電側電力変換部を送電制御状態に移行させるとともに、前記探索状態で前記結合度合いが前記所定閾度合い以上に到達しない場合に前記送電側電力変換部を前記受信待機状態へと移行させてもよい。
【0010】
(5):上記(4)に記載の非接触電力伝送システムは、前記移動体に搭載されて前記受電側コイルに接続される受電側電力変換部(例えば、実施形態での受電電力変換部16)を備え、前記受電側制御装置は、前記受電側通信装置が前記送電側通信装置から前記鍵情報を受信した後に、前記受電側電力変換部を前記受電側コイルの短絡状態から前記第2情報の送信状態へと移行させ、前記第2情報の送信後に、前記受電側電力変換部を前記送信状態から電力の受電待機状態へ移行させ、前記受電待機状態で受電電力が所定時間以内に所定電力以上に到達する場合に前記受電側電力変換部を受電制御状態に移行させるとともに、前記受電待機状態で受電電力が前記所定時間以内に前記所定電力以上に到達しない場合に前記受電側電力変換部を前記送信状態へと移行させてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
板ばね
22日前
本田技研工業株式会社
収納部
16日前
本田技研工業株式会社
搬送装置
14日前
本田技研工業株式会社
積層装置
21日前
本田技研工業株式会社
ロボット
22日前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
鞍乗型車両
15日前
本田技研工業株式会社
電池パック
24日前
本田技研工業株式会社
物体検出装置
7日前
本田技研工業株式会社
電力変換装置
8日前
本田技研工業株式会社
電流検出装置
9日前
本田技研工業株式会社
車両制御装置
3日前
本田技研工業株式会社
電流検出装置
9日前
本田技研工業株式会社
管理システム
4日前
本田技研工業株式会社
電気駆動装置
1か月前
本田技研工業株式会社
電力変換装置
4日前
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
導体接合方法
3日前
本田技研工業株式会社
位置推定装置
3日前
本田技研工業株式会社
薄板搬送装置
10日前
本田技研工業株式会社
運転評価装置
29日前
本田技研工業株式会社
電力変換装置
8日前
本田技研工業株式会社
物体検出装置
9日前
本田技研工業株式会社
画像処理装置
28日前
本田技研工業株式会社
鞍乗り型車両
17日前
本田技研工業株式会社
ガス回収装置
15日前
本田技研工業株式会社
情報提供装置
23日前
本田技研工業株式会社
情報提供装置
23日前
本田技研工業株式会社
外界認識装置
11日前
本田技研工業株式会社
鞍乗り型車両
1日前
本田技研工業株式会社
鞍乗り型車両
17日前
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
体幹用装着具
25日前
本田技研工業株式会社
位置決め装置
21日前
本田技研工業株式会社
電動駆動装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ