TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025127857
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024805
出願日
2024-02-21
発明の名称
気象観測装置、気象観測方法及びプログラム
出願人
学校法人早稲田大学
代理人
弁理士法人創光国際特許事務所
主分類
G01W
1/00 20060101AFI20250826BHJP(測定;試験)
要約
【課題】レーダーを用いて行われる雲体に関する測定の精度を向上させる。
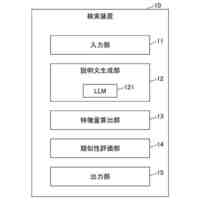
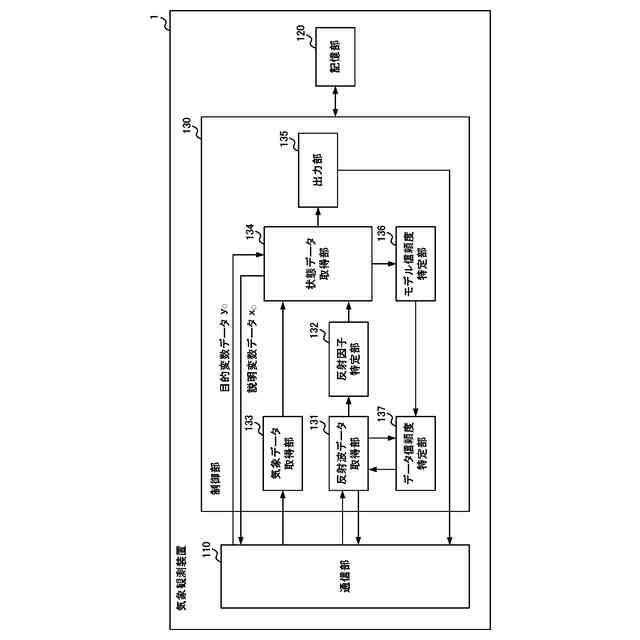
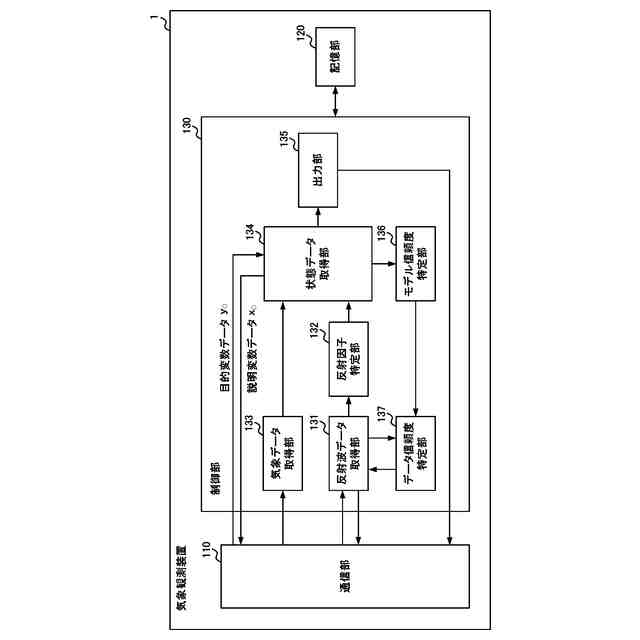
【解決手段】気象観測装置1は、学習済モデルに説明変数データを入力することにより取得した状態データに基づいて学習済モデルの信頼度であるモデル信頼度を特定するモデル信頼度特定部136と、少なくともモデル信頼度に基づいて、複数の空間位置それぞれに対応する状態データの信頼度を示すデータ信頼度を特定するデータ信頼度特定部137と、状態データに基づいて、雲体の状態を示す推定気象データを出力する出力部135と、を有し、反射波データ取得部131は、複数の位置のうちデータ信頼度が相対的に低い1以上の低信頼度位置を含む所定範囲内から、低信頼度位置以外の位置を含む所定範囲内から反射波データを取得する回数以上の回数にわたって低信頼度位置に対応する複数の反射波データを取得する。
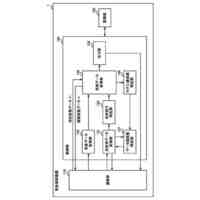
【選択図】図4
特許請求の範囲
【請求項1】
レーダー装置にレーダー電波を発射させ、当該レーダー電波が空中の雲体に反射した反射波に基づく反射波データを取得する反射波データ取得部と、
前記雲体の位置における気圧及び気温を示す気象データを外部装置から取得する気象データ取得部と、
前記反射波データに基づいて、前記雲体の位置ごとに観測されるレーダー反射因子を特定する反射因子特定部と、
前記反射波データが取得された時点に対応する前記気象データと前記レーダー反射因子とを含む説明変数データが入力されると、前記雲体の状態を示し、かつ目的変数データである状態データの確率分布を出力する学習済モデルに前記説明変数データを入力することにより、前記状態データを取得する状態データ取得部と、
前記状態データに基づいて、前記説明変数データが入力された場合の前記学習済モデルの信頼度であるモデル信頼度を特定するモデル信頼度特定部と、
少なくとも前記モデル信頼度に基づいて、複数の空間位置それぞれに対応する前記状態データの信頼度を示すデータ信頼度を特定するデータ信頼度特定部と、
前記状態データに基づいて、前記雲体の状態を示す推定気象データを出力する出力部と、
を有し、
前記反射波データ取得部は、複数の位置のうち前記データ信頼度が相対的に低い1以上の低信頼度位置を含む所定範囲内から、低信頼度位置以外の位置を含む所定範囲内から前記反射波データを取得する回数以上の回数にわたって前記低信頼度位置に対応する複数の前記反射波データを取得する、
気象観測装置。
続きを表示(約 1,300 文字)
【請求項2】
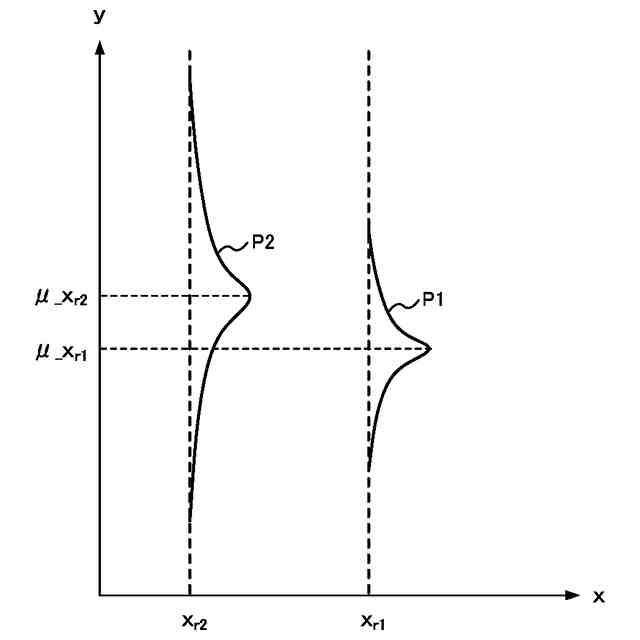
前記モデル信頼度特定部は、前記状態データの確率分布の広がりに基づいて前記モデル信頼度を特定する、
請求項1に記載の気象観測装置。
【請求項3】
前記データ信頼度特定部は、前記モデル信頼度と、前記反射波データの受信強度(RSSI)及びSN比(SNR)の少なくともいずれかを引数とするデータ誤差関数と、に基づいて前記データ信頼度を特定する、
請求項1に記載の気象観測装置。
【請求項4】
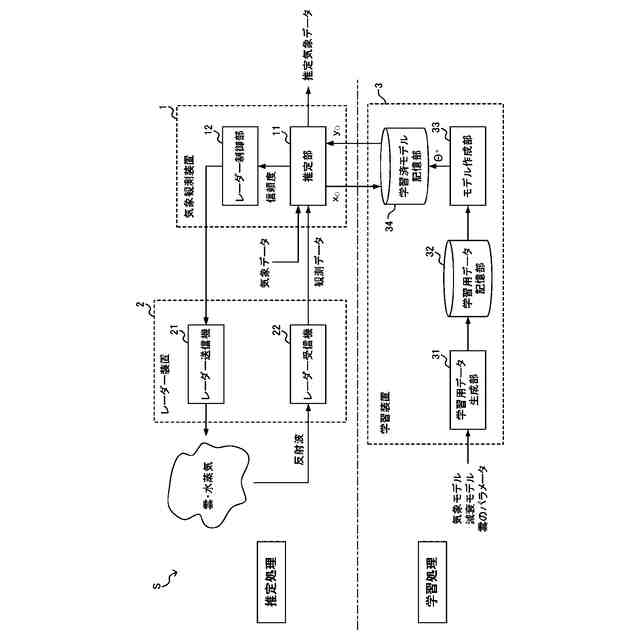
学習用気象データと学習用レーダー反射因子とを含む説明変数データと、学習用雲体の状態を示す状態データと、により構成される複数の学習用データセットを用いて前記状態データの確率分布に対応する確率密度関数を決めるモデルパラメータを機械学習したガウス過程回帰モデルである前記学習済モデルを記憶する記憶部をさらに有する、
請求項1に記載の気象観測装置。
【請求項5】
前記状態データ取得部は、前記気象データ取得部が取得した複数の時点に対応する複数の前記気象データのうち、前記反射波データ取得部が前記反射波データを取得した時点に対応する前記雲体の位置における気圧及び気温を示す前記気象データを前記レーダー反射因子とともに説明変数として前記学習済モデルに入力する、
請求項1に記載の気象観測装置。
【請求項6】
前記反射波データ取得部は、前記データ信頼度特定部が前記データ信頼度を特定する前に前記レーダー装置が発射したレーダー電波の電力よりも大きな電力のレーダー電波をさらに発射して、前記1以上の低信頼度位置を含む所定範囲内からの前記反射波データを取得する、
請求項1から5のいずれか1項に記載の気象観測装置。
【請求項7】
前記反射波データ取得部は、前記データ信頼度が閾値未満である場合、当該データ信頼度に対応する位置を含む前記所定範囲内であり、かつ前記反射波データを取得していない位置からの前記複数の反射波データを取得する、
請求項1から5のいずれか1項に記載の気象観測装置。
【請求項8】
前記出力部は、前記状態データの確率分布から決まる前記状態データの平均値を前記雲体の状態を示す前記推定気象データとして出力する、
請求項1から5のいずれか1項に記載の気象観測装置。
【請求項9】
前記出力部は、所定範囲内の複数の位置に対応する個々の前記反射波データに対応する個々の前記状態データの確率分布から決まる個々の平均値の平均値を、前記所定範囲内の位置に対応する前記推定気象データとして出力する、
請求項8に記載の気象観測装置。
【請求項10】
前記出力部は、前記前記個々の状態データの平均値を前記個々の反射波データの受信強度及びSN比の少なくともいずれかで重みづけして求めた平均値に基づく前記雲体の状態を示す前記推定気象データを出力する、
請求項9に記載の気象観測装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、気象観測装置、気象観測方法及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、レーダー電波を用いて雨雲を観測する技術が知られている。特許文献1には、過去の観測データに基づく機械学習により作成された学習済モデルを用いて、レーダー電波から取得された情報に基づいて雨が降る位置を推定するシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-139033号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
レーダー装置を用いて雨雲を観測する場合、レーダー電波が雲体で反射して生じる反射波の測定結果に基づいて、雲体に含まれる雲水量又は水蒸気量等が推測される。雲体又は水蒸気等の状態によっては、反射波の減衰量が大きくなったり、気流の変化又は外乱の影響で反射波の受信電力が変動したり、雑音が重畳したりして、反射波に基づく雲水量又は水蒸気量等の推測の精度が低下してしまうという問題があった。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、レーダーを用いて行われる雲体に関する測定の精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様の気象観測装置は、レーダー装置にレーダー電波を発射させ、当該レーダー電波が空中の雲体に反射した反射波に基づく反射波データを取得する反射波データ取得部と、前記雲体の位置における気圧及び気温を示す気象データを外部装置から取得する気象データ取得部と、前記反射波データに基づいて、前記雲体の位置ごとに観測されるレーダー反射因子を特定する反射因子特定部と、前記反射波データが取得された時点に対応する前記気象データと前記レーダー反射因子とを含む説明変数データが入力されると、前記雲体の状態を示し、かつ目的変数データである状態データの確率分布を出力する学習済モデルに前記説明変数データを入力することにより、前記状態データを取得する状態データ取得部と、前記状態データに基づいて、前記説明変数データが入力された場合の前記学習済モデルの信頼度であるモデル信頼度を特定するモデル信頼度特定部と、少なくとも前記モデル信頼度に基づいて、複数の空間位置それぞれに対応する前記状態データの信頼度を示すデータ信頼度を特定するデータ信頼度特定部と、前記状態データに基づいて、前記雲体の状態を示す推定気象データを出力する出力部と、を有し、前記反射波データ取得部は、複数の位置のうち前記データ信頼度が相対的に低い1以上の低信頼度位置を含む所定範囲内から、低信頼度位置以外の位置を含む所定範囲内から前記反射波データを取得する回数以上の回数にわたって前記低信頼度位置に対応する複数の前記反射波データを取得する。
【0007】
前記モデル信頼度特定部は、前記状態データの確率分布の広がりに基づいて前記モデル信頼度を特定してもよい。
【0008】
前記データ信頼度特定部は、前記モデル信頼度と、前記反射波データの受信強度(RSSI)及びSN比(SNR)の少なくともいずれかを引数とするデータ誤差関数と、に基づいて前記データ信頼度を特定してもよい。
【0009】
学習用気象データと学習用レーダー反射因子とを含む説明変数データと、学習用雲体の状態を示す状態データと、により構成される複数の学習用データセットを用いて前記状態データの確率分布に対応する確率密度関数を決めるモデルパラメータを機械学習したガウス過程回帰モデルである前記学習済モデルを記憶する記憶部をさらに有してもよい。
【0010】
前記状態データ取得部は、前記気象データ取得部が取得した複数の時点に対応する複数の前記気象データのうち、前記反射波データ取得部が前記反射波データを取得した時点に対応する前記雲体の位置における気圧及び気温を示す前記気象データを前記レーダー反射因子とともに説明変数として前記学習済モデルに入力してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人早稲田大学
蛍光分析装置
3か月前
学校法人早稲田大学
周波数フィルタ
4か月前
学校法人早稲田大学
太陽光発電モジュール
1か月前
学校法人早稲田大学
光変換装置及び光伝送システム
1か月前
学校法人早稲田大学
視触覚センサ及びその製造方法
23日前
学校法人早稲田大学
熱界面接合部材及びその製造方法
1か月前
学校法人早稲田大学
光学素子および空中映像投影装置
1か月前
学校法人早稲田大学
金属シリコンとガラスの溶融分離方法
14日前
学校法人早稲田大学
多重衝突パルス噴流圧縮方式のエンジン
5か月前
オルト株式会社
オートファジー活性化剤
4か月前
学校法人早稲田大学
気象観測装置、気象観測方法及びプログラム
2か月前
学校法人早稲田大学
情報処理方法、情報処理装置及びプログラム
1か月前
学校法人早稲田大学
体液からヒト骨格筋線維タイプを推定する方法
10日前
学校法人早稲田大学
カーボンナノチューブの製造装置および製造方法
1か月前
三機工業株式会社
下水汚泥焼却灰の肥料化方法
今日
学校法人早稲田大学
知覚支援システム、評価装置及びそのプログラム
9日前
学校法人早稲田大学
寿命評価装置、そのプログラム、及び寿命評価方法
1か月前
学校法人早稲田大学
量子計算方法、量子計算システム、及びプログラム
4か月前
NTT株式会社
検索装置、検索方法及びプログラム
1か月前
環境計測株式会社
光化学オキシダント予測システム
1か月前
イスクラ産業株式会社
膀胱がん用抗がん剤の製造方法
29日前
積水化学工業株式会社
合成部材及び合成セグメントの施工方法
4か月前
積水化学工業株式会社
合成部材及び合成セグメントの施工方法
4か月前
国立大学法人 鹿児島大学
評価方法、評価装置及びプログラム
4か月前
NTT株式会社
配送計画装置、配送計画方法、及びプログラム
3か月前
公立大学法人横浜市立大学
データ収集システムおよびプログラム
2か月前
NTT株式会社
推定装置、復元装置、推定方法、およびプログラム
28日前
学校法人早稲田大学
分離方法及びリチウムイオン二次電池用電極活物質のリサイクル方法
1日前
積水化学工業株式会社
被切削部材、被切削群、及び立坑壁の施工方法
4か月前
国立大学法人 熊本大学
パルス電流発生装置及びパルス電流発生方法
2か月前
NTT株式会社
組合せ最適化方法、組合せ最適化装置、及びプログラム
1か月前
学校法人早稲田大学
アンテナの放射特性を測定する測定方法、測定システム、及びプログラム
1か月前
国立大学法人 東京大学
フラビウイルスに対するアプタマー及びその使用
28日前
株式会社コーセー
情報処理装置の動作方法、情報処理装置、及びプログラム
1日前
国立大学法人東京科学大学
アニーリング処理装置、アニーリング処理方法及びプログラム
2か月前
学校法人早稲田大学
スルフィド結合含有重合体、その製造方法、スルフィド結合含有重合体組成物、及び光学材料
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ