TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025129937
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026926
出願日
2024-02-26
発明の名称
コース走行車両、走行制御方法、および走行制御プログラム
出願人
三菱電機株式会社
代理人
弁理士法人クロスボーダー特許事務所
主分類
G08G
1/00 20060101AFI20250829BHJP(信号)
要約
【課題】自動運転を行う移動体において玉突き到着したことを判定することにより、玉突き到着時における走行の遅延を防止することを目的とする。
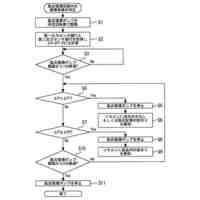
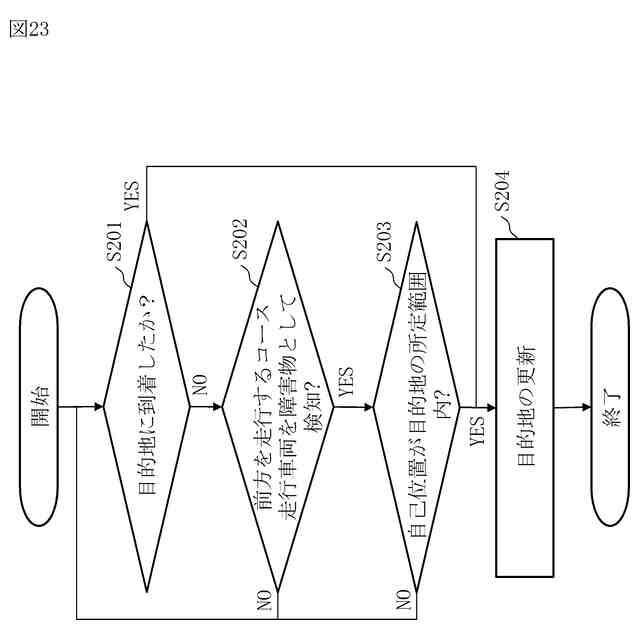
【解決手段】コース走行車両は、走行経路を自動運転する移動体である。コース走行車両の走行制御部は、障害物を検知しており、かつ自己位置が現在の自動運転の目的地の所定範囲内にあるかを判定する。走行制御部は、障害物を検知しており、かつ自己位置が現在の自動運転の目的地の所定範囲内にあると判定すると、コース走行車両が現在の自動運転の目的地に到達したと判定する。
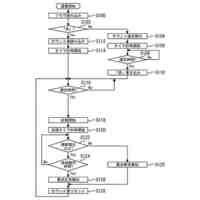
【選択図】図23
特許請求の範囲
【請求項1】
走行経路を自動運転するコース走行車両において、
当該コース走行車両が障害物を検知しており、かつ当該コース走行車両の自己位置が現在の自動運転の目的地の所定範囲内にあるかを判定し、当該コース走行車両が障害物を検知しており、かつ当該コース走行車両の自己位置が現在の自動運転の目的地の所定範囲内にある場合に、現在の自動運転の目的地に到達したと判定する走行制御部を備えるコース走行車両。
続きを表示(約 1,200 文字)
【請求項2】
前記走行制御部は、
現在の自動運転の目的地に到達したと判定すると、次の目的地への走行経路を自動運転するように制御する請求項1に記載のコース走行車両。
【請求項3】
前記コース走行車両は、
ゴルフコースを縦列に自動運転する複数のコース走行車両に含まれており、
前記走行制御部は、
前方を走行するコース走行車両を前記障害物として検知し、かつ自己位置が現在の自動運転の目的地の所定範囲内にある場合に、現在の自動運転の目的地に到達したと判定する請求項1または請求項2に記載のコース走行車両。
【請求項4】
前記走行制御部は、
前記前方を走行するコース走行車両の形状を学習することにより、前記前方を走行するコース走行車両を前記障害物として検知する請求項3に記載のコース走行車両。
【請求項5】
前記走行制御部は、
前記コース走行車両が手動運転から自動運転に切り替わると、前記コース走行車両の現在の位置とヨ-角とに基づいて、前記走行経路から前記コース走行車両の現在の位置とヨ-角に最も近い走行経路を抽出し、抽出した走行経路に基づいて前記コース走行車両の目的地を更新する請求項1または請求項2に記載のコース走行車両。
【請求項6】
前記走行制御部は、
前記走行経路に含まれるウェイポイントから、前記コース走行車両の現在のヨ-角の所定範囲内のヨ-角を有ずるウェイポイントを抽出し、抽出したウェイポイントから前記コース走行車両の現在の位置に最も近いウェイポイントを特定し、特定されたウェイポイントを含む走行経路の目的地を前記コース走行車両の目的地として更新する請求項5に記載のコース走行車両。
【請求項7】
走行経路を自動運転するコース走行車両に用いられる走行制御方法において、
コンピュータが、当該コース走行車両が障害物を検知しており、かつ当該コース走行車両の自己位置が現在の自動運転の目的地の所定範囲内にあるかを判定し、当該コース走行車両が障害物を検知しており、かつ当該コース走行車両の自己位置が現在の自動運転の目的地の所定範囲内にある場合に、現在の自動運転の目的地に到達したと判定する走行制御方法。
【請求項8】
走行経路を自動運転するコース走行車両に用いられる走行制御プログラムにおいて、
当該コース走行車両が障害物を検知しており、かつ当該コース走行車両の自己位置が現在の自動運転の目的地の所定範囲内にあるかを判定し、当該コース走行車両が障害物を検知しており、かつ当該コース走行車両の自己位置が現在の自動運転の目的地の所定範囲内にある場合に、現在の自動運転の目的地に到達したと判定する走行制御処理をコンピュータに実行させる走行制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、コース走行車両、走行制御方法、および走行制御プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
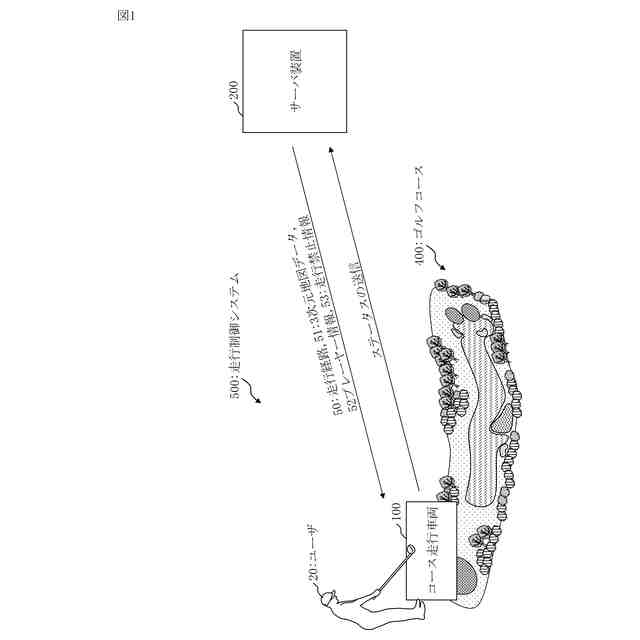
現状のゴルフコースでは4人乗りカートによるプレーが多くを占めている。一方で、各ゴルファがPMVあるいはAMRをゴルフカートとして利用する技術も開発されつつある。この場合、複数台のPMVあるいはAMRがゴルフコースにおいて自動走行を行うことになる。PMVは、Personal Mobility Vehicleの略語である。AMRは、Autonomous Mobile Robotの略語である。
【0003】
ゴルフコースなどでは、複数台のPMVが縦列に自律走行を行う場合がある。このとき、先頭のPMVが最初の目的地に到着したと判断したとき、後続のPMVは目的地に到着した状態とならない。後続のPMVは、前方のPMVを障害物検知して停止した状態となる。そして、後続のPMVが最初の目的地に到着し、次の目的地に発進した後に、その次のPMVが最初の目的地に到着するという挙動になる。これにより、各PMVにおける停止時間が長くなってしまうという問題がある。特にゴルフコースなどではプレーの遅延につながる恐れがある。
【0004】
特許文献1には、自律移動する無人搬送車の次の行き先を、経路上に配置された制御機器から設定する運転制御システムが開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2002-215237号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ゴルフ場向けPMVを例とすると、最大4台での自律走行が考えられる。このため、先頭PMVが最初の目的地に到着し次の目的地が設定され、次の目的地に発進した後に、2台目が最初の目的地に到着することになる。玉突き到着時におけるこのような挙動により、各PMVの停止時間が長くなる。よって、先頭PMVに乗車しているプレーヤーは4台目が到着するまで次のホールにおいて待つことになる。このように、待ち時間が発生することによるプレー時間の遅延が懸念される。
【0007】
特許文献1の技術は、次の行き先を経路上に配置された制御機器から設定するものであり、PMVあるいはAMR単体で制御することができず、処理時間およびコストの面からも適当ではない。
【0008】
本開示では、自動運転を行う移動体において玉突き到着したことを判定することにより、玉突き到着時における走行の遅延を防止することを目的とする。
【課題を解決するための手段】
【0009】
本開示に係るコース走行車両は、走行経路を自動運転するコース走行車両において、
当該コース走行車両が障害物を検知しており、かつ当該コース走行車両の自己位置が現在の自動運転の目的地の所定範囲内にあるかを判定し、当該コース走行車両が障害物を検知しており、かつ当該コース走行車両の自己位置が現在の自動運転の目的地の所定範囲内にある場合に、現在の自動運転の目的地に到達したと判定する走行制御部を備える。
【発明の効果】
【0010】
本開示に係るコース走行車両では、走行制御部が、障害物を検知しており、かつ自己位置が現在の自動運転の目的地の所定範囲内にあるかを判定する。そして、走行制御部が、障害物を検知しており、かつ自己位置が現在の自動運転の目的地の所定範囲内にある場合に、現在の自動運転の目的地に到達したと判定する。よって、本開示に係るコース走行車両によれば、玉突き到着したことを判定することができ、玉突き到着時における走行の遅延を防止することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
給湯機
1か月前
三菱電機株式会社
冷蔵庫
25日前
三菱電機株式会社
計測器
1か月前
三菱電機株式会社
照明器具
1か月前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
回転電機
14日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
照明装置
7日前
三菱電機株式会社
照明器具
13日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
回転電機
18日前
三菱電機株式会社
回転電機
10日前
三菱電機株式会社
照明装置
28日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
送風装置
1か月前
三菱電機株式会社
照明器具
20日前
三菱電機株式会社
電源回路
2か月前
三菱電機株式会社
照明装置
26日前
三菱電機株式会社
換気装置
13日前
三菱電機株式会社
電子機器
24日前
三菱電機株式会社
半導体装置
13日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
飛しょう体
1か月前
三菱電機株式会社
電気掃除機
18日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
回路遮断器
17日前
三菱電機株式会社
回路遮断器
27日前
三菱電機株式会社
半導体装置
24日前
三菱電機株式会社
半導体装置
13日前
三菱電機株式会社
半導体装置
24日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
電気接続部
2か月前
三菱電機株式会社
半導体装置
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ