TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131072
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028579
出願日
2024-02-28
発明の名称
力覚センサとロボットを用いた等速自在継手の外側継手部材の検査方法および検査装置
出願人
NTN株式会社
代理人
個人
,
個人
主分類
F16D
3/20 20060101AFI20250902BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】等速自在継手の外側継手部材のスプライン嵌合検査やトラック溝PCDランク選別検査の自動化が可能な検査方法および検査装置を提供すること。
【解決手段】ロボットのハンドの先端に力覚センサを設け、他端をスプライン模範に接続したロボットを用い、力覚センサの検出力をロボットの動作制御にフィードバックし、スプライン嵌合検査を行う等速自在継手の外側継手部材の検査方法であって、基台に設けられた固定ユニットに把持された外側継手部材のスプラインの端部にスプライン模範を被せた状態で回転させてスプラインの位相合わせを行う位相合わせ工程と、位相の一致を回転モーメント荷重に対する力覚センサの検出力から判定する位相一致判定工程と、その後、スプライン模範を挿入して、スプライン模範の挿入高さを検査すると共に、スプライン模範押し付け力を検査するスプライン嵌合検査工程とを備え、スプライン嵌合検査を行うことを特徴とする。
【選択図】図10
特許請求の範囲
【請求項1】
ロボットのハンドの先端に力覚センサを設け、前記力覚センサの一端をハンドに接続すると共に他端をスプライン模範に接続したロボットを用い、前記力覚センサの検出力を前記ロボットの動作制御にフィードバックし、スプライン嵌合検査を行う等速自在継手の外側継手部材の検査方法であって、
基台に設けられた固定ユニットに把持された前記外側継手部材の前記スプラインの端部に前記スプライン模範を被せた状態で回転させてスプラインの位相合わせを行う位相合わせ工程と、位相の一致を回転モーメント荷重に対する前記力覚センサの検出力から判定する位相一致判定工程と、その後、前記スプライン模範を挿入して、前記スプライン模範の挿入高さを検査すると共に、前記スプライン模範の押し付け力を検査するスプライン嵌合検査工程とを備え、スプライン嵌合検査を行うことを特徴とする力覚センサとロボットを用いた等速自在継手の外側継手部材の検査方法。
続きを表示(約 1,800 文字)
【請求項2】
ロボットのハンドの先端に力覚センサを設け、前記力覚センサの一端をハンドに接続すると共に他端をスプライン模範に接続したロボットを用い、前記力覚センサの検出力を前記ロボットの動作制御にフィードバックし、スプライン嵌合検査を行う等速自在継手の外側継手部材の検査装置であって、
スプライン嵌合検査部が、前記スプライン模範、前記チャックおよび基台上に固設された固定ユニットを備え、
前記チャックおよび前記固定ユニットが、前記外側継手部材を把持可能に構成され、前記固定ユニットに把持した前記外側継手部材に前記スプライン嵌合検査部の前記スプライン模範を下降可能とし、
前記力覚センサが、前記スプライン嵌合検査部における前記スプライン模範の位相の一致に伴う回転モーメント荷重と押し付け力を検出可能とし、スプライン嵌合検査を行うことを特徴とする力覚センサとロボットを用いた等速自在継手の外側継手部材の検査装置。
【請求項3】
ロボットのハンドの先端に力覚センサを設け、前記力覚センサの一端をハンドに接続すると共に他端をチャックに接続したロボットを用い、前記力覚センサの検出力を前記ロボットの動作制御にフィードバックし、トラック溝PCDランク選別検査を行う等速自在継手の外側継手部材の検査方法であって、
前記外側継手部材を前記チャックにより把持し、基台に設けられたトラック溝PCDランク模範に前記外側継手部材の開口側端部を被せた状態で回転させてトラック溝の位相合わせを行う位相合わせ工程と、位相の一致を回転モーメント荷重に対する前記力覚センサの検出力から判定する位相一致判定工程とを備え、トラック溝PCDランク選別検査を行うことを特徴とする力覚センサとロボットを用いた等速自在継手の外側継手部材の検査方法。
【請求項4】
ロボットのハンドの先端に力覚センサを設け、前記力覚センサの一端をハンドに接続すると共に他端をチャックに接続したロボットを用い、前記力覚センサの検出力を前記ロボットの動作制御にフィードバックし、トラック溝PCDランク選別検査を行う等速自在継手の外側継手部材の検査装置であって、
前記トラック溝PCDランク選別検査部が、前記チャックおよび前記基台上に固設されたトラック溝PCDランク模範を備え、
前記チャックに把持した前記外側継手部材を前記トラック溝PCDランク選別検査部の前記トラック溝PCDランク模範に下降可能とし、
前記力覚センサが、前記トラック溝PCDランク選別検査部における前記トラック溝PCDランク模範の位相の一致に伴う回転モーメント荷重を検出可能とし、トラック溝PCDランク選別検査を行うことを特徴とする力覚センサとロボットを用いた等速自在継手の外側継手部材の検査装置。
【請求項5】
前記スプライン嵌合検査と、前記トラック溝PCDランク選別検査の両方を行うことを特徴とする請求項1および請求項3に記載の力覚センサとロボットを用いた等速自在継手の外側継手部材の検査方法。
【請求項6】
前記スプライン嵌合検査と、前記トラック溝PCDランク選別検査の両方を行うことを特徴とする請求項2および請求項4に記載の力覚センサとロボットを用いた等速自在継手の外側継手部材の検査装置。
【請求項7】
前記基台に設けられたトラック溝PCDランク模範は、ローラ外径のサイズが違う複数個で構成されている請求項3~6のいずれか一項に記載の力覚センサとロボットを用いた等速自在継手の外側継手部材の検査方法および検査装置。
【請求項8】
前記ロボットのハンドの中心に前記スプライン模範を設け、前記スプライン模範の周りに前記チャックを設けて、前記トラック溝PCDランク模範の端部に前記外側継手部材を被せた状態で回転させてトラック溝の位相合わせを行う際に、前記外側継手部材の前記スプラインと前記スプライン模範の位相の一致による嵌合状態によって回転モーメントで外側継手部材と前記チャックとの間に滑りが生じるのを防止したことを特徴とする請求項5又は請求項6に記載の力覚センサとロボットを用いた等速自在継手の外側継手部材の検査方法および検査装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、力覚センサとロボットを用いた等速自在継手の外側継手部材の検査方法および検査装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
自動車や各種産業機械の動力伝達系を構成する等速自在継手は、駆動側と従動側の二軸をトルク伝達可能に連結すると共に、前記二軸が作動角をとっても等速で回転トルクを伝達することができる。等速自在継手は、角度変位のみを許容する固定式等速自在継手と、角度変位および軸方向変位の両方を許容する摺動式等速自在継手とに大別され、例えば、自動車のエンジンから駆動車輪に動力を伝達するドライブシャフトにおいては、デフ側(インボード側)に摺動式等速自在継手が使用され、駆動車輪側(アウトボード側)には固定式等速自在継手が使用される。
【0003】
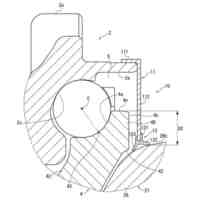
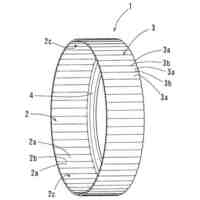
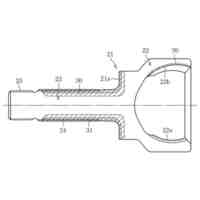
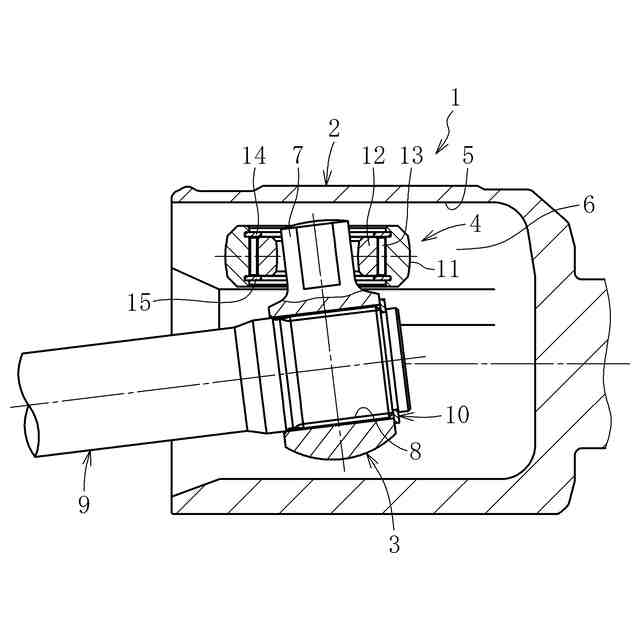
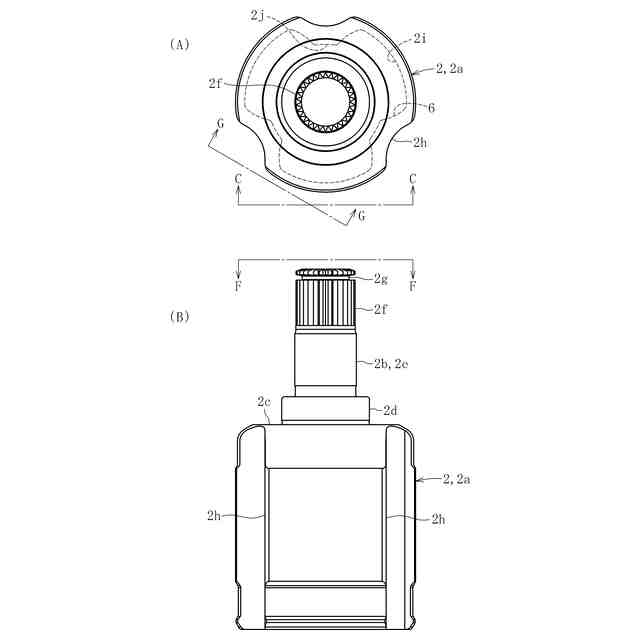
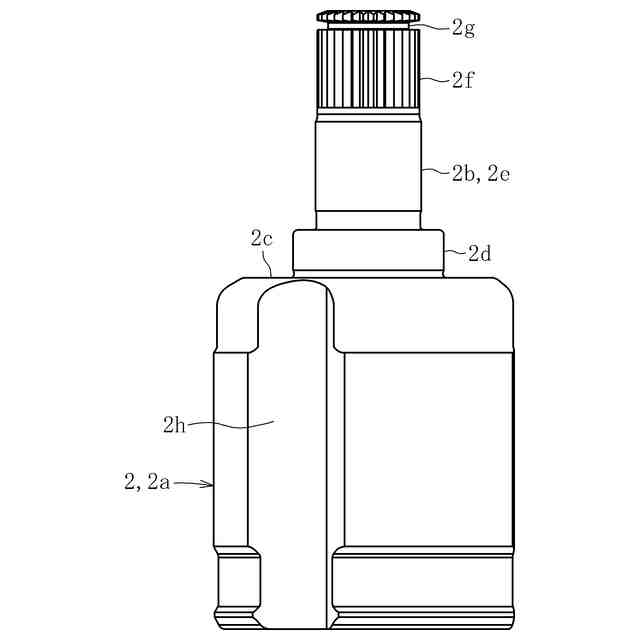
摺動式等速自在継手の一つとしてトリポード型等速自在継手がある。トリポード型等速自在継手は、トルク伝達部材であるローラがシングルローラタイプと、ダブルローラタイプが知られている。ダブルローラタイプのトリポード型等速自在継手(以下、単にトリポード型等速自在継手ともいう)は、外側継手部材と、内側継手部材としてのトリポード部材と、トルク伝達部材としてのローラアセンブリとで主要部が構成されている。外側継手部材のカップ部の底部にはステム部が一体に形成され、ステム部の端部にはデファレンシャルと連結されるスプラインが形成されている。
【0004】
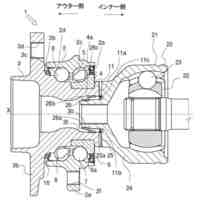
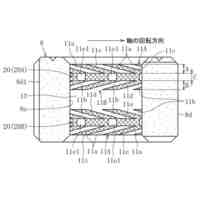
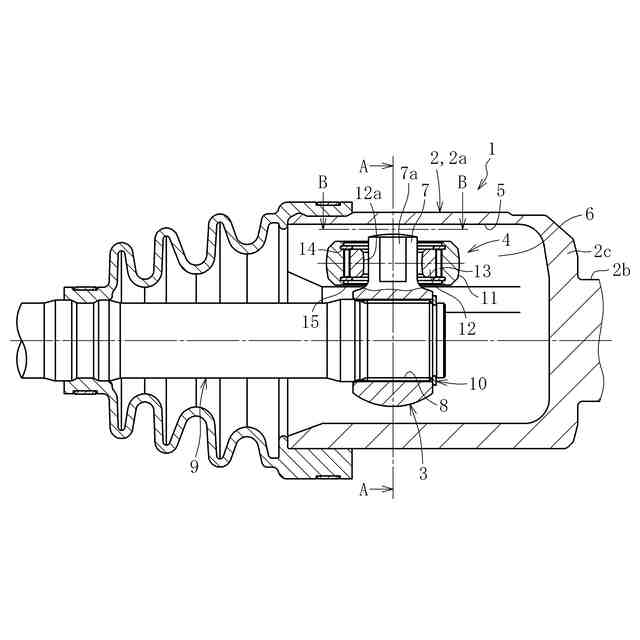
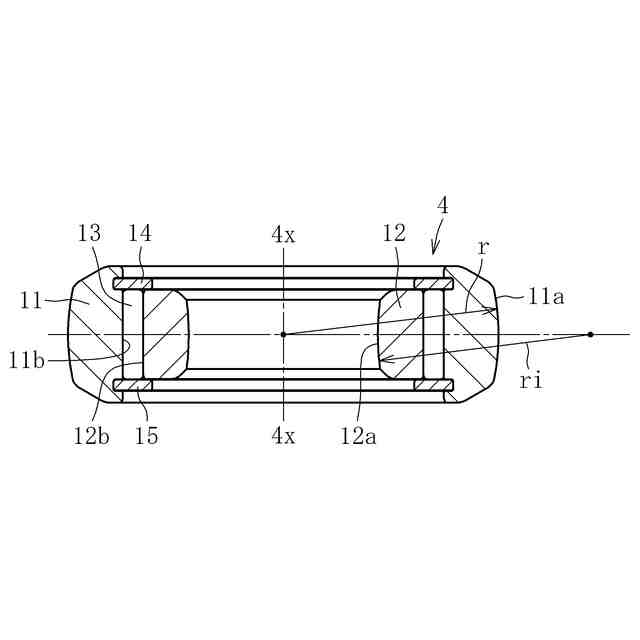
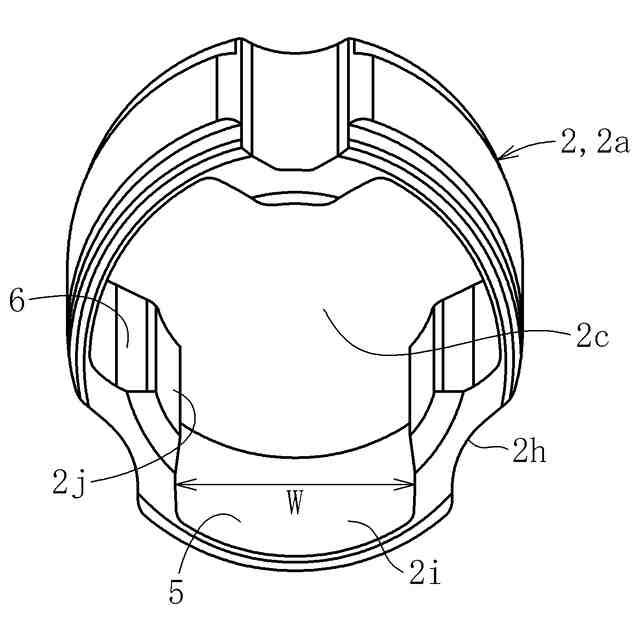
外側継手部材は、その内周面に軸方向に延びる3本の直線状トラック溝が周方向等間隔に形成され、各トラック溝の両側には、円周方向に対向して配置され、それぞれ軸方向に延びるローラ案内面が形成されている。外側継手部材の内部には、トリポード部材とローラアセンブリが収容されている。トリポード部材は、半径方向に突出した3本の脚軸を有する。ローラアセンブリは、ローラと、このローラの内側に配置されて脚軸に外嵌されたインナリングと、ローラとインナリングとの間に介在された複数の針状ころとで主要部が構成されており、外側継手部材のトラック溝に収容されている。インナリングの内周面は、インナリングの軸線を含む縦断面において円弧状凸面をなす。
【0005】
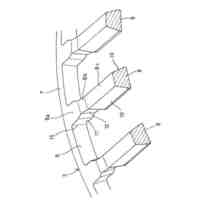
トリポード部材の各脚軸の外周面は、脚軸の軸線を含んだ縦断面においてストレート形状をなし、脚軸の軸線と直交する横断面において略楕円形状をなし、継手の軸線と直交する方向でインナリングの内周面と接触し、継手の軸線方向でインナリングの内周面との間に隙間が形成されている。このトリポード型等速自在継手では、トリポード部材の脚軸に装着されたローラアセンブリのローラが、外側継手部材のトラック溝のローラ案内面上を転動する。脚軸の横断面が略楕円形状であるので、トリポード型等速自在継手が作動角を取ったとき、外側継手部材の軸線に対してトリポード部材の軸線は傾斜するが、ローラアセンブリはトリポード部材の脚軸の軸線に対して傾斜可能である。したがって、ローラがローラ案内面上を正しく転動するので、誘起スラストやスライド抵抗の低減を図ることができ、継手の低振動化を実現することができる。外側継手部材に形成されたローラ案内面を有する3つのトラック溝の形状は、主にアンギュラコンタクトやサーキュラコンタクトが適用される。
【0006】
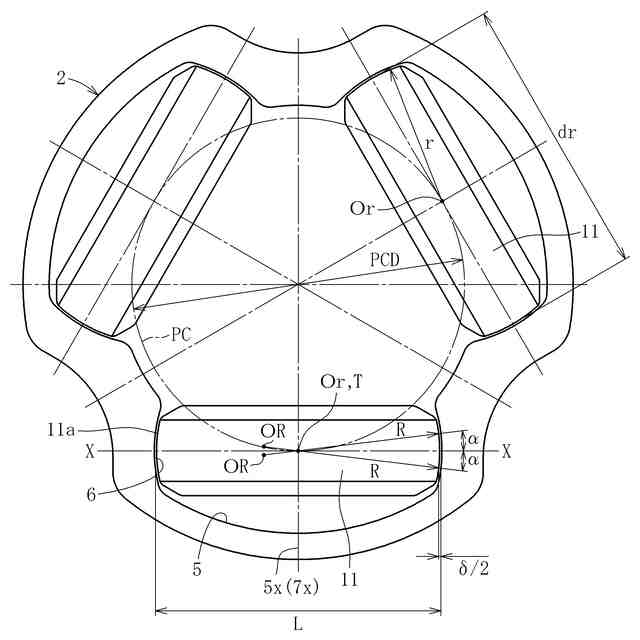
摺動式トリポード型等速自在継手は、製造コストを安価にするために、外側継手部材のカップ部内を冷間鍛造で仕上げ、熱処理後、カップ部内を研削加工等による仕上げ加工を施さないことが一般的である。そのため、冷間鍛造の精度の影響に加えて、さらに、トラック溝のローラ案内面の熱処理によって生じる熱処理変形により、トラック溝のピッチ円上のローラ案内面間の幅寸法であるトラック径は、ばらつきが生じる。この結果、トラック径とローラ外径との間のすきまであるトラックすきまに影響する。
【0007】
摺動式トリポード型等速自在継手は、適正なトラックすきまを確保するために、外側継手部材のトラック径に対してローラ外径を選択組合せすることが一般的であるが、この選択組合せの効率的な実用を可能にすることが生産性、製造コストの面で重要である。
【0008】
上記のようなトリポード型等速自在継手の外側継手部材のステム部に形成されたスプラインの嵌合検査や、トラック径に対するローラ外径の選択組合せのためのトラック溝PCDランク選別検査は、従来人手を主体に行っていた。スプラインの嵌合検査やトラック溝PCDランク選別検査には、嵌合、選別検査の前に外側継手部材の位相合わせが必要であり、現状、この位相合わせには、センサ等を用いた大掛かりな装置の使用が考えられる。等速自在継手の用途とは異なるが、嵌合作業の自動化にはロボットを用いた次のような技術が提案されている。
【0009】
例えば、歯車の穴に軸を挿入する作業では、力制御のみでは挿入距離が長く挿入させるまでに時間がかかることから、カメラを併用して挿入する時間を短くする技術が提案されている(特許文献1)。また、力検出部を持つロボットによりねじ穴の検査を行うに当たって、ねじ用限界ゲージをねじ穴に挿入して、回転させて合否判定を行うが、この時、力の検出によって動作を停止する。位置の判定は挿入量などのどれか一つ以上を基準にすることで安定して挿入できる技術が提案されている(特許文献2)。
【0010】
さらに、製品の穴に円柱の模範を挿入する際に、寸法公差が小さい場合、精度よくティーチングする必要がある。その際、回転させながら挿入することで滑らかに挿入できるようになる技術が提案されている(特許文献3)。
【先行技術文献】
【特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
NTN株式会社
玉軸受
26日前
NTN株式会社
ころ軸受
1か月前
NTN株式会社
密封装置
8日前
NTN株式会社
転がり軸受
22日前
NTN株式会社
深溝玉軸受
8日前
NTN株式会社
転がり軸受
21日前
NTN株式会社
転がり軸受
13日前
NTN株式会社
円筒ころ軸受
26日前
NTN株式会社
球面滑り軸受
11日前
NTN株式会社
状態監視装置
1か月前
NTN株式会社
軸受用保持器
4日前
NTN株式会社
絶縁転がり軸受
6日前
NTN株式会社
車輪用軸受装置
26日前
NTN株式会社
車輪用軸受装置
7日前
NTN株式会社
車輪用軸受装置
14日前
NTN株式会社
保持器付き針状ころ
1か月前
NTN株式会社
シェル形針状ころ軸受
1か月前
NTN株式会社
循環式トイレユニット
今日
NTN株式会社
ラジアルフォイル軸受
6日前
NTN株式会社
算出装置、および算出方法
7日前
NTN株式会社
摺動ナットおよびすべりねじ装置
2か月前
学校法人中部大学
振動測定装置
6日前
NTN株式会社
通電ユニットおよび軸受ユニット
8日前
NTN株式会社
軸受用絶縁カバー及び転がり軸受
1か月前
NTN株式会社
転がり軸受用保持器及び転がり軸受
1か月前
NTN株式会社
密封装置及びそれを備えた車輪用軸受装置
7日前
NTN株式会社
動圧軸受、流体動圧軸受装置、及びモータ
1か月前
NTN株式会社
軸受装置
14日前
NTN株式会社
機械部品
1か月前
NTN株式会社
軸受装置
18日前
NTN株式会社
クラッチユニットおよびステアバイワイヤ方式の操舵装置
8日前
NTN株式会社
シャント抵抗、シャント抵抗の製造方法、および制御装置
1か月前
NTN株式会社
転がり軸受
5日前
NTN株式会社
等速自在継手用外側継手部材及びこれを備える等速自在継手
11日前
NTN株式会社
角度検出装置
1か月前
NTN株式会社
把持機構を備えたハンド、およびこれを備えた部品供給システム
26日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ