TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025135307
公報種別
公開特許公報(A)
公開日
2025-09-18
出願番号
2024033086
出願日
2024-03-05
発明の名称
操縦指示方法、操縦指示装置、及び、プログラム
出願人
北菱電興株式会社
,
石川県公立大学法人
代理人
個人
主分類
A01B
69/00 20060101AFI20250910BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 抱える障害に応じた操縦指示を作業者へ通知する操縦指示方法を提供する。
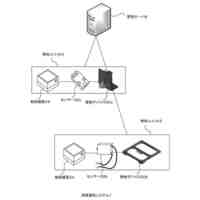
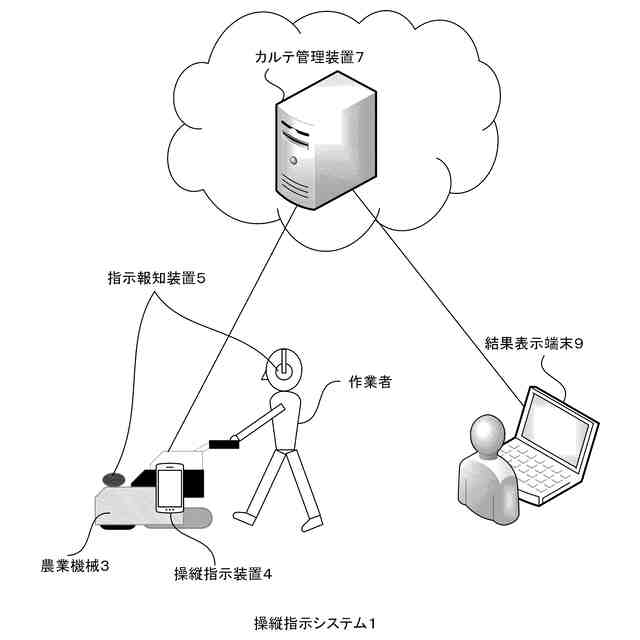
【解決手段】 操縦指示システム1は、位置測定モジュール40が、知的障害又は精神障害を抱える作業者が運転する農業機械3の位置を測定する位置測定ステップと、操縦指示装置4が、位置測定ステップにおいて測定された位置情報に基づいて、農業機械3の操縦指示を含む指示情報を生成する指示情報生成ステップと、指示報知装置5が、指示情報生成ステップにおいて生成された操縦指示を作業者へ報知する報知ステップとを有し、指示情報生成ステップにおいて、操縦指示装置4は、作業者の障害の種類、及び、障害の程度に基づいて、指示情報生成する。
【選択図】図1
特許請求の範囲
【請求項1】
位置測定モジュールが、知的障害又は精神障害を抱える作業者が運転する農業機械の位置を測定する位置測定ステップと、
操縦指示装置が、前記位置測定ステップにおいて測定された位置情報に基づいて、前記農業機械の操縦指示を含む指示情報を生成する指示情報生成ステップと、
指示報知装置が、前記指示情報生成ステップにおいて生成された操縦指示を前記作業者へ報知する報知ステップと
を有し、
前記指示情報生成ステップにおいて、前記操縦指示装置は、前記作業者の障害の種類、及び、障害の程度に基づいて、指示情報を生成する
操縦指示方法。
続きを表示(約 2,300 文字)
【請求項2】
前記指示情報生成ステップにおいて、前記作業者の障害の程度に応じた操縦指示の報知のタイミングを決定し、
前記報知ステップにおいて、前記指示報知装置は、前記指示情報生成ステップにおいて決定された操縦指示の報知のタイミングに基づいて、生成された操縦指示を作業者へ報知する
請求項1に記載の操縦指示方法。
【請求項3】
前記指示報知装置は、前記作業者の障害の種類に応じて、視覚、聴覚、又は触覚により指示を認識させる装置、又は、これらの組み合わせにより指示を認識させる装置であり、
前記指示情報生成ステップにおいて、前記操縦指示装置は、前記指示報知装置の指示の出力方法に基づいて指示情報を生成する
請求項1に記載の操縦指示方法。
【請求項4】
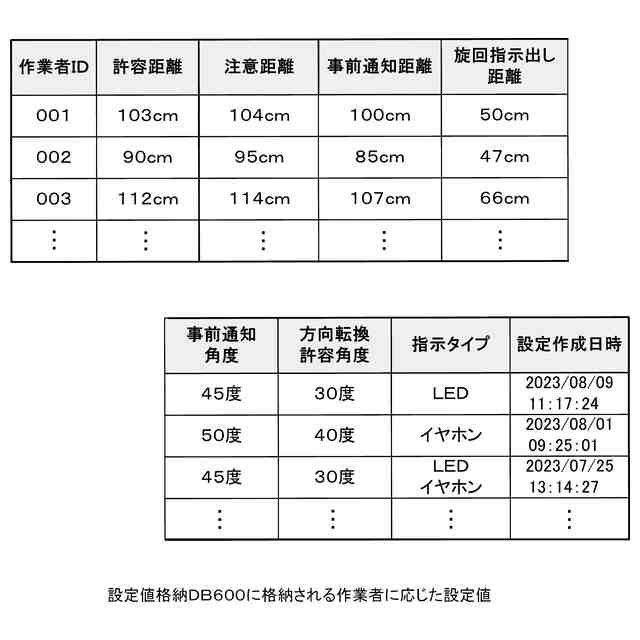
前記操縦指示装置が、前記作業者の障害の程度に応じた、農業機械への操縦指示に関する設定値を格納する設定値格納ステップ
をさらに有し、
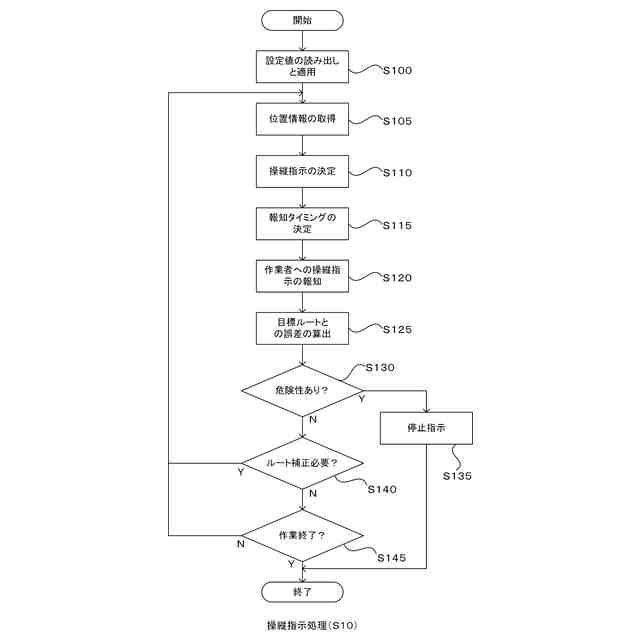
前記設定値格納ステップにおいて、前記操縦指示装置は、前記作業者による、操縦指示に基づいた農業機械の運転ルートと目標ルートとの誤差において、許容される範囲である許容誤差を格納し、
前記操縦指示装置が、前記設定値格納ステップにおいて格納される許容誤差に基づいて、前記運転ルートの補正が必要であるか否かを判定する補正判定ステップ
をさらに有し、
前記指示情報生成ステップにおいて、前記操縦指示装置は、前記補正判定ステップにおいて運転ルートの補正が必要であると判定された場合に、目標ルートと運転ルートとの誤差を前記許容誤差内に収める指示情報を生成し、
前記指示報知ステップにおいて、前記指示報知装置は、前記指示情報生成ステップにおいて生成された補正指示を前記作業者へ報知する
請求項1に記載の操縦指示方法。
【請求項5】
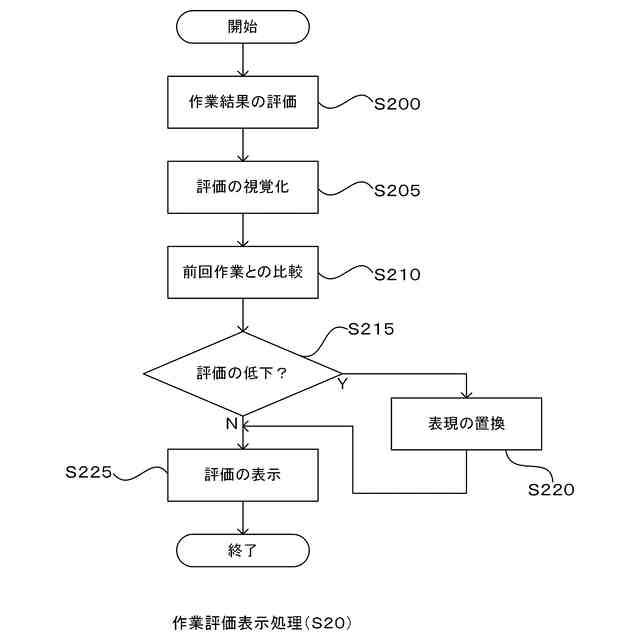
前記操縦指示装置が、前記指示情報生成ステップにより生成された指示情報に基づいた農業機械の操縦結果を評価する評価ステップと、
前記操縦指示装置が、前記評価ステップにおける評価と、当該評価に対応するイラスト又はシンボルとを関連付ける視覚情報関連付けステップと、
前記操縦指示装置が、前記評価ステップにおける評価を、前記視覚情報関連付けステップにおいて関連付けられたイラスト又はシンボルにより表示する表示ステップと
をさらに有する
請求項1に記載の操縦指示方法。
【請求項6】
前記評価ステップにおいて、前記操縦指示装置は、作業の正確性と、作業時間とに基づいて、前記作業者による作業を評価し、
前記評価ステップにおいて、前記操縦指示装置は、前記作業の正確性を、前記作業者による操縦指示に基づいた農業機械の運転ルートと目標ルートとの誤差により評価する
請求項5に記載の操縦指示方法。
【請求項7】
前記操縦指示装置が、同じ作業者による同じ作業において、前記評価ステップにおいて評価された前回の作業評価と、今回の作業評価とを比較する比較ステップと、
前記操縦指示装置が、前記比較ステップにおける比較結果において、評価が下がった場合に、下がった評価を示す文言を、既定の文言へと置換する置換ステップと
をさらに有し、
前記表示ステップにおいて、前記操縦指示装置が、前記評価ステップにおける評価を、前記置換ステップにおいて置換された文言により表示する
請求項5に記載の操縦指示方法。
【請求項8】
前記評価ステップにおいて、前記操縦指示装置は、同じ作業者により実施された作業の作業回数に基づいた作業の継続性を評価し、
前記表示ステップにおいて、前記操縦指示装置は、前記評価ステップにおいて評価された継続性を、前記視覚情報関連付けステップにおいて関連付けられたイラスト又はシンボルにより表示する
請求項5に記載の操縦指示方法。
【請求項9】
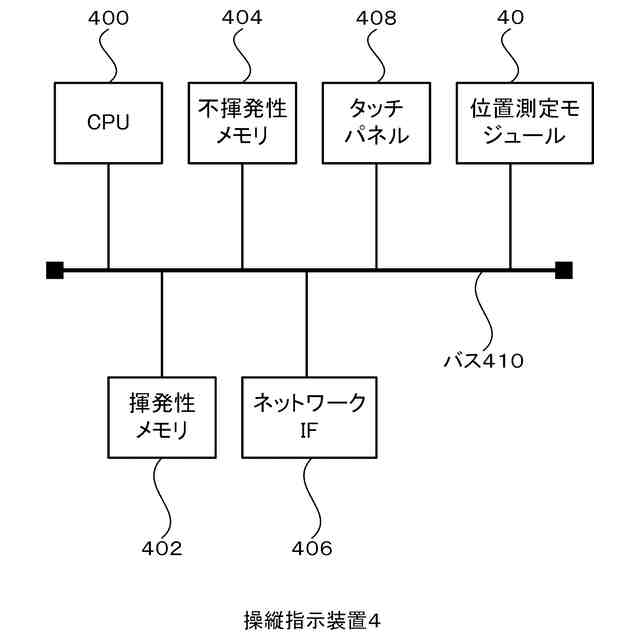
農業機械に取り付けられ、当該農業機械の位置を測定する位置測定モジュールから前記農業機械の位置情報を受信する位置情報受信部と、
前記位置情報受信部により受信された位置情報に基づいて、前記農業機械の操縦指示を含む指示情報を生成する指示情報生成部と、
前記指示情報作成部により生成された操縦指示を、作業者へ報知する指示報知装置に通知する指示情報通知部と
を有し、
前記農業機械は、知的障害又は精神障害を抱える作業者が運転し、
前記指示情報生成部は、前記作業者の障害の種類、及び、障害の程度に応じた指示情報を生成する
操縦指示装置。
【請求項10】
農業機械に取り付けられ、当該農業機械の位置を測定する位置測定モジュールから前記農業機械の位置情報を受信する位置情報受信ステップと、
前記位置情報受信ステップにより受信された位置情報に基づいて、前記農業機械の操縦指示を含む指示情報を生成する指示情報生成ステップと、
前記指示情報作成ステップにおいて生成された指示情報を、作業者へ報知する指示報知装置に通知する指示情報通知ステップと
を有し、
前記農業機械は、知的障害又は精神障害を抱える作業者が運転し、
前記指示情報生成ステップにおいて、前記作業者の障害の種類、及び、障害の程度に応じた指示情報生成する
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操縦指示方法、操縦指示装置、及び、プログラムに関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
例えば、特許文献1では、制御手段と接続される撮像装置及び/又は環境センサ及び測位装置を搭載する、圃園内に生育する作物の畝を跨いで走行する、管理装置本機を具えた圃園管理装置において、前記圃園管理装置は、前記圃園内の枕地を測位装置による位置情報及び/又はユーザーによる決定に従った走行経路に基づき自律走行を行うと共に、前記畝を跨いで走行する時には、前記測位装置による位置情報及び/又はユーザーによる決定に従った走行経路に基づく情報に加えて、畝を検知する情報を基に、自律運転を行うものであることを特徴とする圃園管理装置が開示されている。
【0003】
さらに、特許文献2では、複数の音声記録と、アクティブ化されると前記音声記録のうちの1つが音声再生回路(54)を通じて再生されるようにするユーザ入力組立物(34)とを含むストレージ・デバイス(44)を備える、労働者を教育するための職業指示装置(10)であって、前記労働者が行うことになっている少なくとも1つの職務を表す複数のシンボル(21~28)と、前記複数のシンボルに関連しており、前記複数のシンボルのうちの1つを選択するために、前記労働者によってアクティブ化されると、選択されたシンボルを示す電気信号を作り出す前記ユーザ入力組立物(34)と、各々が前記複数のシンボル(21~28)のうちの異なる1つに関連した情報を提供する、複数の音声指示メッセージを含む前記ストレージ・デバイス(44)と、前記ユーザ入力組立物(34)と前記ストレージ・デバイス(44)とに接続され、前記選択されたシンボルに関連した前記複数の音声指示メッセージのうちの1つを再生することによって前記電気信号に応答し、それによって前記労働者が行うことになっている前記職務に関連した指示を前記労働者に提供する前記音声再生回路(54)とによって特徴付けられる装置(10)が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-185955号公報
特表2008-523445号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、抱える障害に応じた操縦指示を作業者へ通知する操縦指示方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る操縦指示方法は、位置測定モジュールが、知的障害又は精神障害を抱える作業者が運転する農業機械の位置を測定する位置測定ステップと、操縦指示装置が、前記位置測定ステップにおいて測定された位置情報に基づいて、前記農業機械の操縦指示を含む指示情報を生成する指示情報生成ステップと、指示報知装置が、前記指示情報生成ステップにおいて生成された操縦指示を前記作業者へ報知する報知ステップとを有し、前記指示情報生成ステップにおいて、前記操縦指示装置は、前記作業者の障害の種類、及び、障害の程度に基づいて、指示情報を生成する。
【0007】
好適には、前記指示情報生成ステップにおいて、前記作業者の障害の程度に応じた操縦指示の報知のタイミングを決定し、前記報知ステップにおいて、前記指示報知装置は、前記指示情報生成ステップにおいて決定された操縦指示の報知のタイミングに基づいて、生成された操縦指示を作業者へ報知する。
【0008】
好適には、前記指示報知装置は、前記作業者の障害の種類に応じて、視覚、聴覚、又は触覚により指示を認識させる装置、又は、これらの組み合わせにより指示を認識させる装置であり、前記指示情報生成ステップにおいて、前記操縦指示装置は、前記指示報知装置の指示の出力方法に基づいて指示情報を生成する。
【0009】
好適には、前記操縦指示装置が、前記作業者の障害の程度に応じた、農業機械への操縦指示に関する設定値を格納する設定値格納ステップをさらに有し、前記設定値格納ステップにおいて、前記操縦指示装置は、前記作業者による、操縦指示に基づいた農業機械の運転ルートと目標ルートとの誤差において、許容される範囲である許容誤差を格納し、前記操縦指示装置が、前記設定値格納ステップにおいて格納される許容誤差に基づいて、前記運転ルートの補正が必要であるか否かを判定する補正判定ステップをさらに有し、前記指示情報生成ステップにおいて、前記操縦指示装置は、前記補正判定ステップにおいて運転ルートの補正が必要であると判定された場合に、目標ルートと運転ルートとの誤差を前記許容誤差内に収める指示情報を生成し、前記指示報知ステップにおいて、前記指示報知装置は、前記指示情報生成ステップにおいて生成された補正指示を前記作業者へ報知する。
【0010】
好適には、前記操縦指示装置が、前記指示情報生成ステップにより生成された指示情報に基づいた農業機械の操縦結果を評価する評価ステップと、前記操縦指示装置が、前記評価ステップにおける評価と、当該評価に対応するイラスト又はシンボルとを関連付ける視覚情報関連付けステップと、前記操縦指示装置が、前記評価ステップにおける評価を、前記視覚情報関連付けステップにおいて関連付けられたイラスト又はシンボルにより表示する表示ステップとをさらに有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
北菱電興株式会社
操縦指示方法、操縦指示装置、及び、プログラム
17日前
北菱電興株式会社
消費通知システム、消費通知方法、及び、プログラム
7か月前
北菱電興株式会社
遺失物管理システム、遺失物管理方法、及び、プログラム
1か月前
北菱電興株式会社
遺失物管理システム、遺失物管理方法、及び、プログラム
1か月前
個人
虫捕り器
6日前
個人
巻糸係止具
27日前
個人
刈込鋏保持具
2日前
個人
飼育容器
16日前
個人
後付巻降ろし器
6日前
個人
虫の生け捕り具
1か月前
個人
植物栽培用培地
1か月前
個人
釣り仕掛け処理具
1か月前
個人
イカ釣り用ヤエン
6日前
個人
植木鉢用台
1か月前
株式会社丹勝
緑化工法
3日前
株式会社シマノ
釣竿
6日前
井関農機株式会社
作業車両
6日前
岡部株式会社
浮魚礁
1か月前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
圃場作業機
27日前
個人
水耕栽培システム
16日前
井関農機株式会社
収穫作業車両
1か月前
個人
苔玉スタンド
1か月前
中国電力株式会社
巣撤去具
1か月前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
16日前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
1か月前
個人
伸縮する草刈り機の可動装置。
6日前
松山株式会社
農作業機
2日前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
16日前
個人
妻面トラス梁付き園芸用ハウス
18日前
株式会社シマノ
ルアー
1か月前
みのる産業株式会社
苗植付装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ