TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141084
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040838
出願日
2024-03-15
発明の名称
サーボドライバ及びサーボドライバの調整方法
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
H02M
7/48 20070101AFI20250919BHJP(電力の発電,変換,配電)
要約
【課題】出力特性のばらつきを抑制できるサーボドライバ及びサーボドライバの調整方法を提供する。
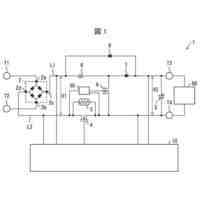
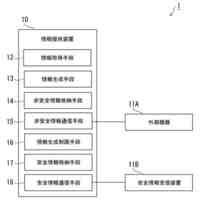
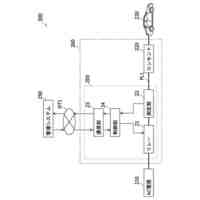
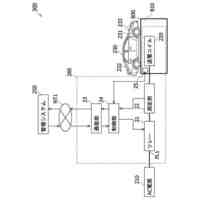
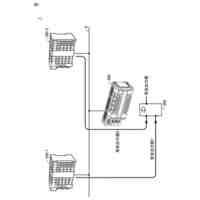
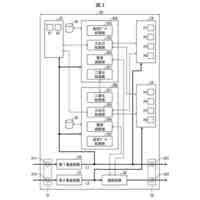
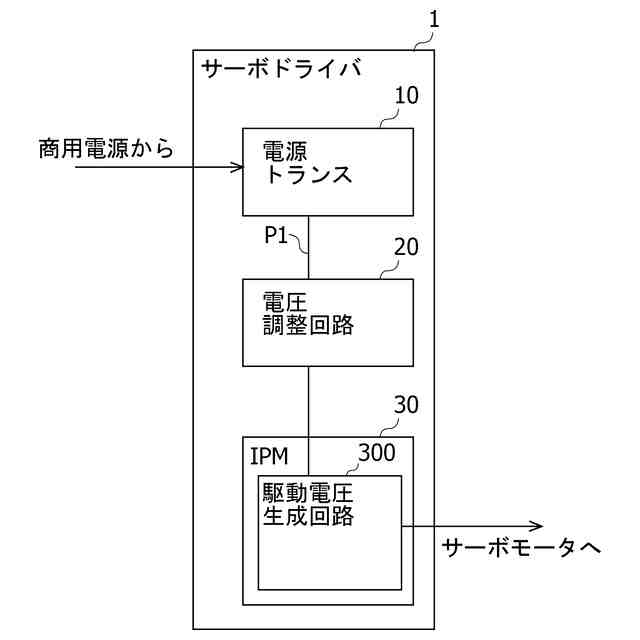
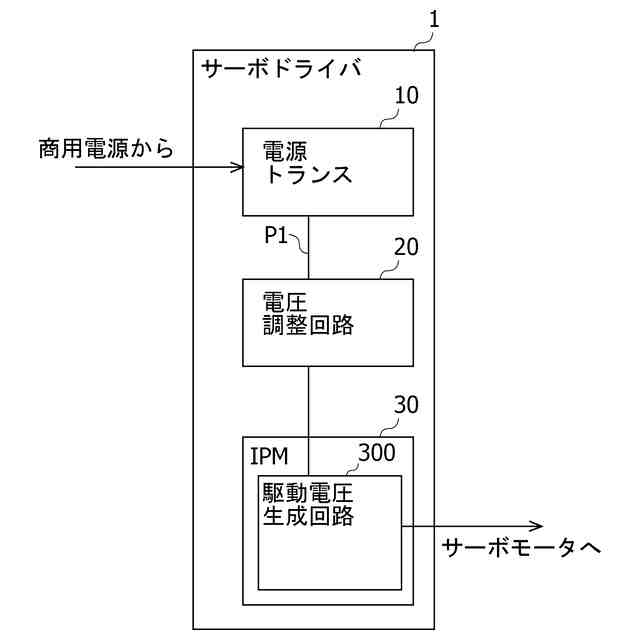
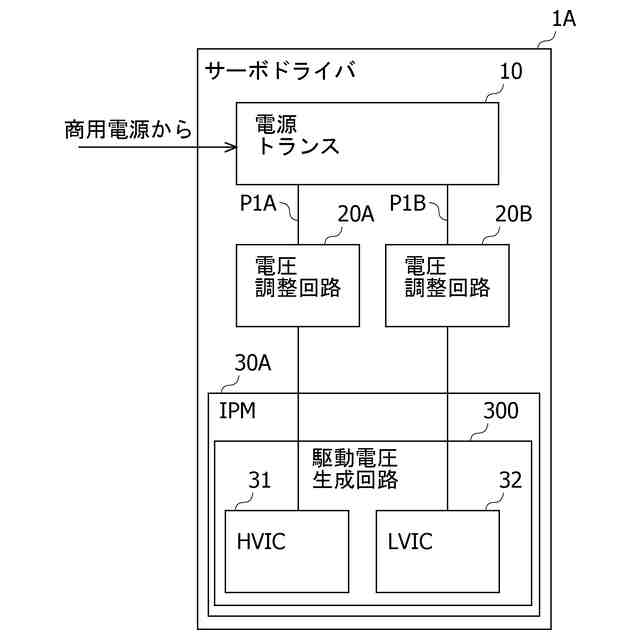
【解決手段】本サーボドライバは、所定の電圧を出力する電源部と、駆動電圧をサーボモータに出力するパワーモジュールであって、上記電源部から供給される電圧に応じて上記駆動電圧の単位時間当たりの電圧変化量が変動するパワーモジュールと、上記電源部と上記パワーモジュールとを接続する給電配線と、上記給電配線上に配置され、上記電源部から上記パワーモジュールに供給される電圧を調整する調整部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
所定の電圧を出力する電源部と、
駆動電圧をサーボモータに出力するパワーモジュールであって、前記電源部から供給される電圧に応じて前記駆動電圧の単位時間当たりの電圧変化量が変動するパワーモジュールと、
前記電源部と前記パワーモジュールとを接続する給電配線と、
前記給電配線上に配置され、前記電源部から前記パワーモジュールに供給される電圧を調整する調整部と、を備える、
サーボドライバ。
続きを表示(約 790 文字)
【請求項2】
前記調整部は可変抵抗器を含み、
前記調整部は、前記可変抵抗器の抵抗値が調整されることで、前記パワーモジュールに供給する電圧を調整する、
請求項1に記載のサーボドライバ。
【請求項3】
前記調整部は、
電圧の指令値を受け付ける受付部と、
前記パワーモジュールに供給する電圧が前記指令値と一致するように前記可変抵抗器の前記抵抗値を調整する抵抗調整部と、を含む、
請求項2に記載のサーボドライバ。
【請求項4】
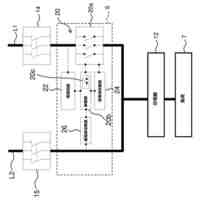
前記パワーモジュールは、上アーム用の第1出力素子と下アーム用の第2出力素子とを含み、
前記給電配線は、前記電源部と前記第1出力素子とを接続する第1給電配線と、前記電源部と前記第2出力素子とを接続する第2給電配線と、を含み、
前記調整部は、前記第1給電配線上に配置されて前記第1出力素子に供給する電圧を調整する第1調整部と、前記第2給電配線上に配置されて前記第2出力素子に供給する電圧を調整する第2調整部と、を含む、
請求項1から3のいずれか一項に記載のサーボドライバ。
【請求項5】
所定の電圧を出力する電源部と、駆動電圧をサーボモータに出力するパワーモジュールであって、前記電源部から供給される電圧に応じて前記駆動電圧の単位時間当たりの電圧変化量が変動するパワーモジュールと、前記電源部と前記パワーモジュールとを接続する給電配線上に配置される調整部と、を備えるサーボドライバの調整方法であって、
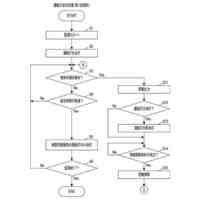
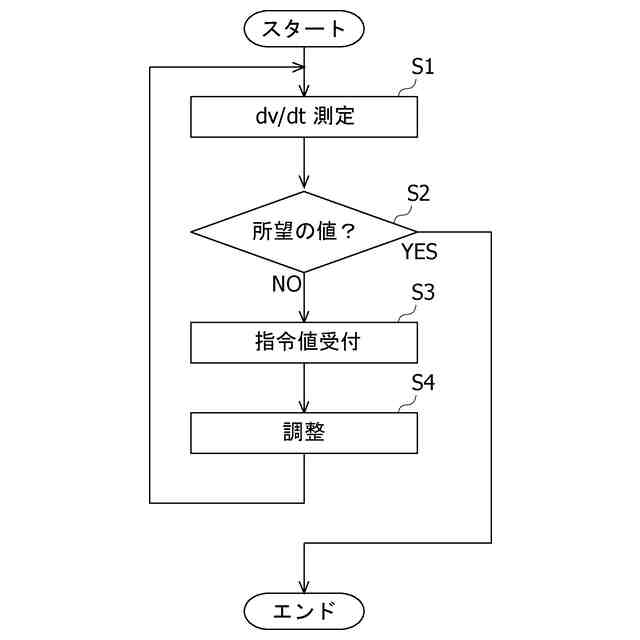
前記駆動電圧の前記単位時間当たりの前記電圧変化量を測定し、
前記単位時間当たりの前記電圧変化量が所望の値となるように、前記電源部から前記パワーモジュールに供給される電圧を前記調整部によって調整する、
サーボドライバの調整方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、サーボドライバ及びサーボドライバの調整方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
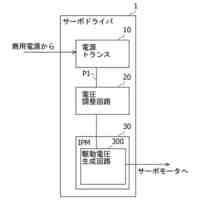
サーボドライバでは、サーボモータに駆動電圧を供給する回路にIntelligent Power Module(IPM)が利用される。特許文献1では、IPMに接続端子を増設し、当該接続端子に接続したコンデンサ及び抵抗を調節することで、IPM内で発生するノイズとスイッチング損失を調整する技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開平9-051068号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
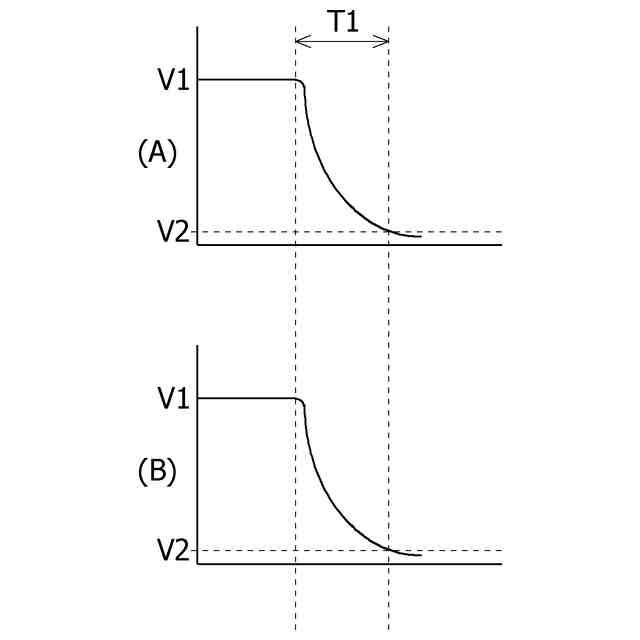
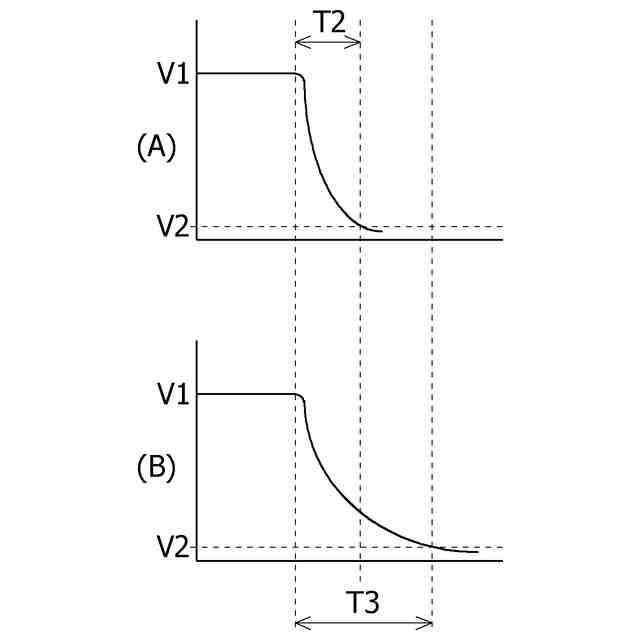
IPMはモジュール化されているため、dv/dtの調整を行うことができないため、同一機種のサーボドライバであってもIPMの個体差の影響により、サーボドライバの出力特性にばらつきが生じていた。
【0005】
開示の技術の1つの側面は、出力特性のばらつきを抑制できるサーボドライバ及びサーボドライバの調整方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
開示の技術の1つの側面は、次のようなサーボドライバによって例示される。本サーボドライバは、所定の電圧を出力する電源部と、駆動電圧をサーボモータに出力するパワーモジュールであって、上記電源部から供給される電圧に応じて上記駆動電圧の単位時間当たりの電圧変化量が変動するパワーモジュールと、上記電源部と上記パワーモジュールとを接続する給電配線と、上記給電配線上に配置され、上記電源部から上記パワーモジュールに供給される電圧を調整する調整部と、を備える。
【0007】
本サーボドライバでは、上記調整部によって上記パワーモジュールの上記単位時間当たりの上記電圧変化量が所望の値になるように調整される。そのため、本サーボドライバによれば、パワーモジュールの個体差による出力特性のばらつきを抑制できる。
【0008】
本サーボドライバは、次の特徴をさらに備えてもよい。上記調整部は可変抵抗器を含み、上記調整部は、上記可変抵抗器の抵抗値が調整されることで、上記パワーモジュールに供給する電圧を調整する。このような特徴を備える本サーボドライバは、上記可変抵抗器の抵抗値を調整するという容易な操作で上記パワーモジュールの上記単位時間当たりの上記電圧変化量が所望の値になるように調整できる。
【0009】
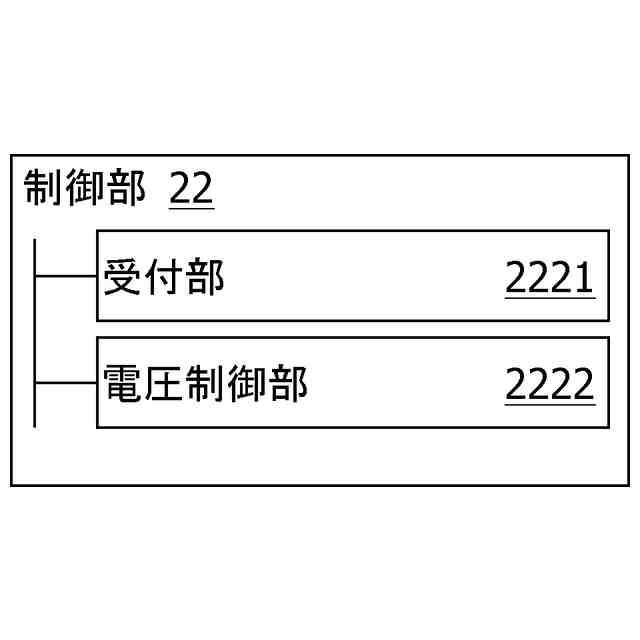
本サーボドライバは、次の特徴をさらに備えてもよい。上記調整部は、電圧の指令値を受け付ける受付部と、上記パワーモジュールに供給する電圧が上記指令値と一致するように上記可変抵抗器の上記抵抗値を調整する抵抗調整部と、を含む。このような特徴を備える本サーボドライバは、例えば、本サーボドライバのユーザに対して、上記パワーモジュールの上記単位時間当たりの上記電圧変化量を所望の値に調整可能とする。
【0010】
本サーボドライバは、次の特徴をさらに備えてもよい。上記パワーモジュールは、上ア
ーム用の第1出力素子と下アーム用の第2出力素子とを含む。上記給電配線は、上記電源部と上記第1出力素子とを接続する第1給電配線と、上記電源部と上記第2出力素子とを接続する第2給電配線と、を含む。上記調整部は、上記第1給電配線上に配置されて上記第1出力素子に供給する電圧を調整する第1調整部と、上記第2給電配線上に配置されて上記第2出力素子に供給する電圧を調整する第2調整部と、を含む。このような特徴を備える本サーボドライバは、上アームと下アームのそれぞれについて、上記パワーモジュールの上記単位時間当たりの上記電圧変化量を所望の値に調整可能とすることができる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電源回路
10日前
オムロン株式会社
電源回路
10日前
オムロン株式会社
電源回路
10日前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
情報提供装置
6日前
オムロン株式会社
スレーブ装置
6日前
オムロン株式会社
IOターミナル
6日前
オムロン株式会社
トリガスイッチ
6日前
オムロン株式会社
モータの監視装置
6日前
オムロン株式会社
導線折り曲げ治具
1か月前
オムロン株式会社
端子折り曲げ治具
6日前
オムロン株式会社
システムおよび方法
6日前
オムロン株式会社
セーフティデバイス
6日前
オムロン株式会社
電力開閉モジュール
6日前
オムロン株式会社
リモート安全入出力装置
6日前
オムロン株式会社
支援システム及び支援方法
6日前
オムロン株式会社
保護継電器及び電力制御装置
6日前
オムロン株式会社
情報処理装置及び情報処理方法
16日前
オムロン株式会社
パワーコンディショナシステム
6日前
オムロン株式会社
給電モジュール及び給電システム
6日前
オムロン株式会社
回転制御システム及び回転制御方法
1か月前
オムロン株式会社
教育支援システム及び教育支援方法
6日前
オムロン株式会社
電力供給システム及び電力制御装置
6日前
オムロン株式会社
計測装置、計測方法及びプログラム
6日前
オムロン株式会社
検査装置、検査方法およびプログラム
16日前
オムロン株式会社
安全IOターミナルおよび安全システム
6日前
オムロン株式会社
交通管制システム、および動作切替方法
6日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
6日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
6日前
オムロン株式会社
スレーブ装置およびネットワークシステム
6日前
オムロン株式会社
監視システム、警報方法、及びプログラム
6日前
オムロン株式会社
サーボドライバ及びサーボドライバの調整方法
6日前
オムロン株式会社
作業認識装置、作業認識方法およびプログラム
1か月前
オムロン株式会社
監視システム、点灯制御方法、及びプログラム
6日前
オムロン株式会社
情報処理システム、情報処理方法及びプログラム
1か月前
オムロン株式会社
開閉装置、及び開閉装置を備える蓄電池システム
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ