TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025141440
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041371
出願日
2024-03-15
発明の名称
車両制御装置及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60R
21/0136 20060101AFI20250919BHJP(車両一般)
要約
【課題】接触時に対象物の属性を判定可能な車両制御装置及びプログラムを提供する。
【解決手段】車両と接触した対象物の属性を判定する制御部を備え、制御部は、車両の周囲の環境を検出した検出値に基づいて、車両外に存在する対象物の属性を認識し、車両と対象物との相対速度を算出し、車両に生じる加速度が、相対速度と加速度との関係に基づいて設定された判定閾値の範囲内である場合、車両と対象物とが接触したと判定する、車両制御装置である。
【選択図】図1
特許請求の範囲
【請求項1】
車両と接触した対象物の属性を判定する制御部を備え、
前記制御部は、
前記車両の周囲の環境を検出した検出値に基づいて、前記車両外に存在する前記対象物の前記属性を認識し、
前記車両と前記対象物との相対速度を算出し、
前記車両に生じる加速度が、前記相対速度と前記加速度との関係に基づいて設定された判定閾値の範囲内である場合、前記車両と前記対象物とが接触したと判定する、
車両制御装置。
続きを表示(約 570 文字)
【請求項2】
前記制御部は、
前記対象物と接触したと判定した場合、前記属性に応じた運転支援制御を実行する、
請求項1に記載の車両制御装置。
【請求項3】
前記制御部は、
認識した前記属性に応じて前記加速度に対する判定閾値の範囲を設定し、
前記加速度が前記判定閾値の範囲内である場合、前記車両と前記対象物とが接触したと判定する、
請求項1に記載の車両制御装置。
【請求項4】
前記制御部は、
前記属性を交通弱者であると推定した場合、前記交通弱者を保護するための運転支援制御を実行する、
請求項3に記載の車両制御装置。
【請求項5】
車両と接触した対象物の属性を判定する車両制御装置に搭載されたコンピュータにインストールされたプログラムであって、
前記車両の周囲の環境を検出した検出値に基づいて、前記車両外に存在する前記対象物の前記属性を認識し、
前記車両と前記対象物との相対速度を算出し、
前記車両に生じる加速度が、前記相対速度と前記加速度との関係に基づいて設定された判定閾値の範囲内である場合、前記車両と前記対象物とが接触したと判定する、処理を前記コンピュータに実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、接触した対象物を推定する車両制御装置及びプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、歩行者や自転車等の交通弱者と車両との衝突を検知して外部へ通報する衝突検知装置が記載されている。この衝突検知装置によれば、対象物を検知し、車両の加速度を検知し、対象物と車両との衝突予測タイミングを算出し、閾値を超えた加速度が検出された検出タイミングと衝突予測タイミングとが同時期である場合に、車両と対象物とが衝突したと判定している。
【先行技術文献】
【特許文献】
【0003】
特開2020-169016号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術によれば、加速度の検出タイミングと衝突予測タイミングとが同時期である場合に、車両と対象物とが衝突したと判定しているため、実際に衝突した対象物と検知した対象物とが同一のものでない可能性があり、対象物を誤判定する可能性があった。
【0005】
本発明は、接触時に対象物の属性を判定可能な車両制御装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様は、車両と接触した対象物の属性を判定する制御部を備え、前記制御部は、前記車両の周囲の環境を検出した検出値に基づいて、前記車両外に存在する前記対象物の前記属性を認識し、前記車両と前記対象物との相対速度を算出し、前記車両に生じる加速度が、前記相対速度と前記加速度との関係に基づいて設定された判定閾値の範囲内である場合、前記車両と前記対象物とが接触したと判定する、車両制御装置である。
【発明の効果】
【0007】
本発明によれば、接触時に対象物の属性を判定することができる。
【図面の簡単な説明】
【0008】
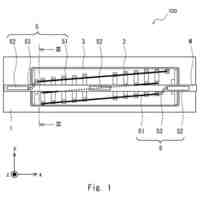
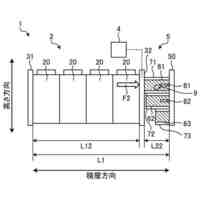
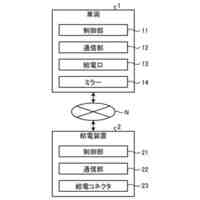
実施形態に係る車両の構成を示すブロック図である。
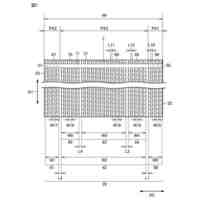
判定用マップの構成を示す図である。
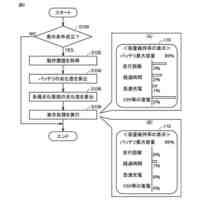
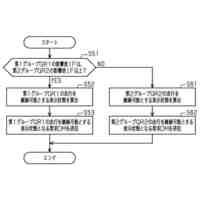
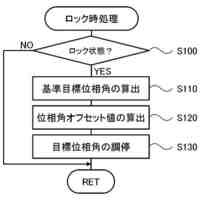
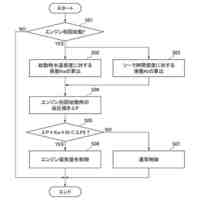
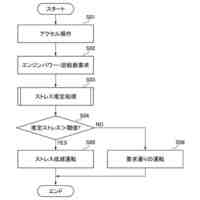
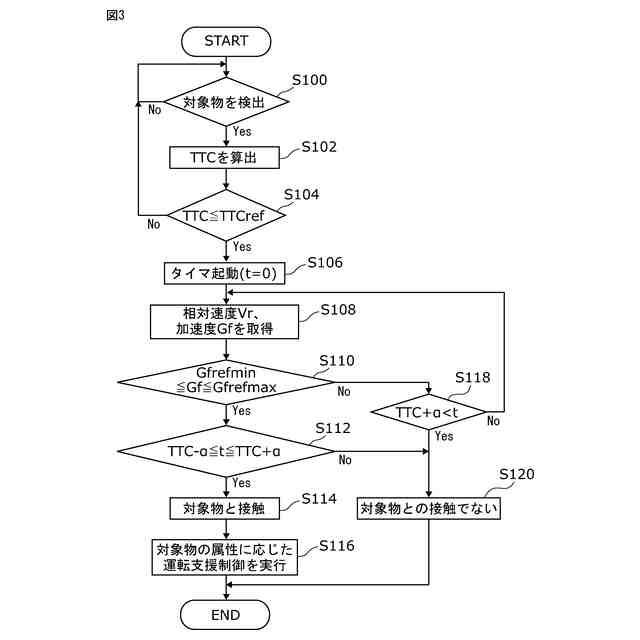
車両制御装置において実行される車両制御方法の処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
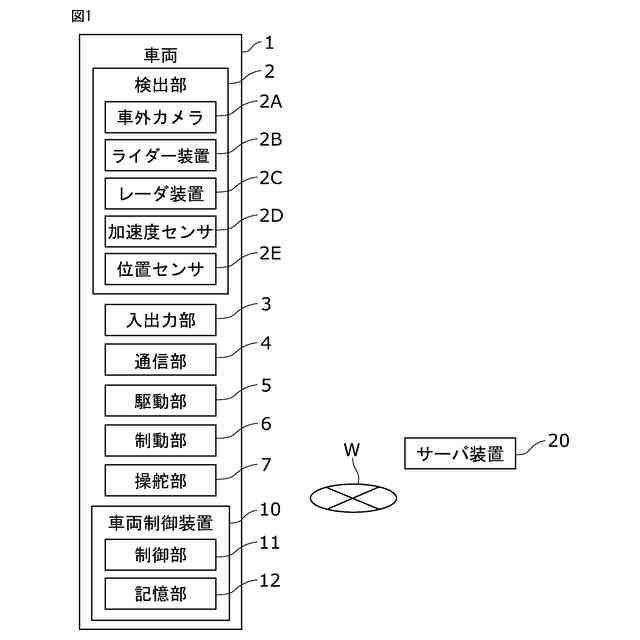
図1に示されるように、車両1は、例えば、走行に関する制御を実行する車両制御装置10を備えている。車両制御装置10は、運転者の操作に基づいて車両1の走行を制御する。車両制御装置10は、車両の走行に関する検出値を検出する検出部2により検出された検出値に基づいて、運転操作を支援する運転支援制御を実行する。
【0010】
検出部2は、車両1の外部の環境を撮像する車外カメラ2Aを備えている。検出部2は、車両1の周囲の所定の撮像範囲を撮像するように1つ以上の車外カメラ2Aを備えていてもよい。車外カメラ2Aは、車両1の周囲の環境を撮像した撮像データを生成し、車両制御装置10に出力する。検出部2は、車両1の外部環境を計測するライダー装置2Bを備えている。ライダー装置2Bは、車両1の外部環境をレーザ光に基づいて計測し、反射光の受光データに基づいて車両1の周囲の環境の3次元データを取得する。ライダー装置2Bは、検出値を車両制御装置10に出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
サーバ
7日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
ロータ
1日前
トヨタ自動車株式会社
電動車
13日前
トヨタ自動車株式会社
塗布装置
1日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
冷却構造
6日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
加熱装置
13日前
トヨタ自動車株式会社
電動車両
13日前
トヨタ自動車株式会社
検査装置
3日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
育苗装置
今日
トヨタ自動車株式会社
制御装置
13日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
制御装置
13日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
内燃機関
13日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
電動車両
13日前
トヨタ自動車株式会社
給電装置
13日前
トヨタ自動車株式会社
冷却装置
13日前
トヨタ自動車株式会社
蓄電装置
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ