TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025145734
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046088
出願日
2024-03-22
発明の名称
ロボット遠隔操作制御システム、ロボット遠隔操作制御装置、ロボット遠隔操作制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
3/00 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】それぞれがエンドエフェクタを有する3本以上のアームを遠隔操作する際、従来より作業性を向上させることができるロボット遠隔操作制御システム、ロボット遠隔操作制御装置、ロボット遠隔操作制御方法、およびプログラムを提供することを目的とする。
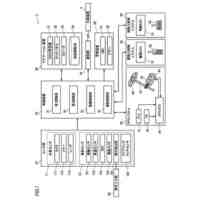
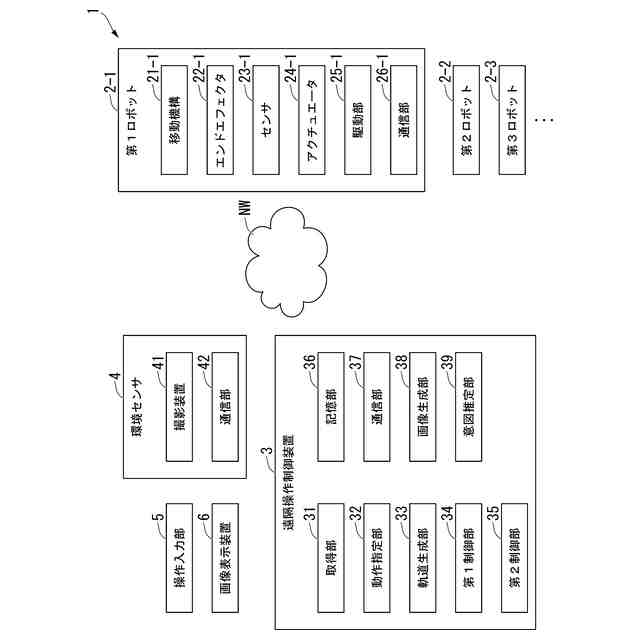
【解決手段】ロボット遠隔操作制御システムは、ロボットは3以上のエンドエフェクタと、エンドエフェクタそれぞれを移動させる移動機構と、操作者の動きに応じて、少なくとも1つのエンドエフェクタの動作を制御する第1制御部と、操作者の動きに基づいて、エンドエフェクタの行動起点を決定し、エンドエフェクタの行動起点からの動作を指定する動作指定部と、動作指定部が指定した動作から、エンドエフェクタの制約された軌道を生成する軌道生成部と、第1制御部が制御しないエンドエフェクタのうち少なくとも1つのエンドエフェクタを軌道上で動作させる第2制御部と、を備える。
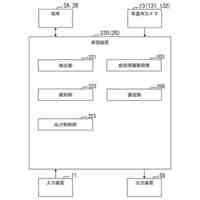
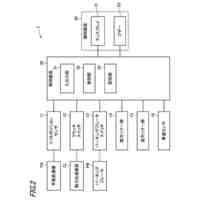
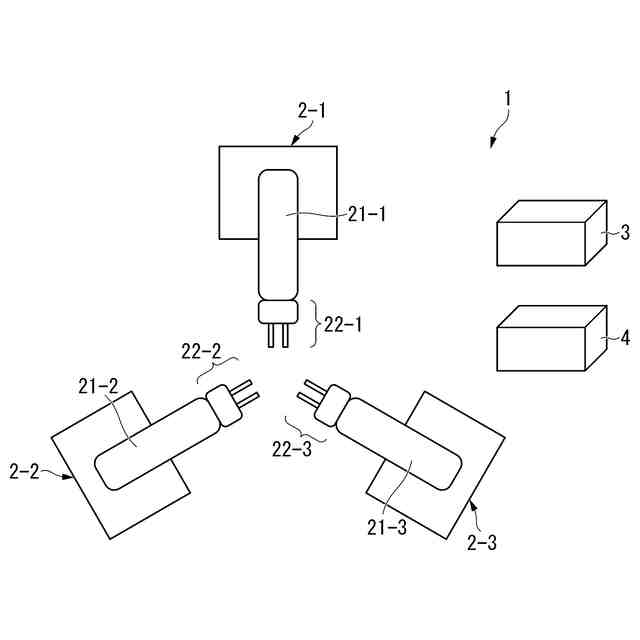
【選択図】図2
特許請求の範囲
【請求項1】
操作者の動きを認識し、ロボットに前記操作者の動きを伝えて前記ロボットを操作するロボット遠隔操作制御システムであって、
前記ロボットは3以上のエンドエフェクタと、
前記エンドエフェクタそれぞれを移動させる移動機構と、
前記操作者の動きに応じて、少なくとも1つの前記エンドエフェクタの動作を制御する第1制御部と、
前記操作者の動きに基づいて、前記エンドエフェクタの行動起点を決定し、前記エンドエフェクタの前記行動起点からの動作を指定する動作指定部と、
前記動作指定部が指定した動作から、前記エンドエフェクタの制約された軌道を生成する軌道生成部と、
前記第1制御部が制御しない前記エンドエフェクタのうち少なくとも1つの前記エンドエフェクタを前記軌道上で動作させる第2制御部と、
を備えるロボット遠隔操作制御システム。
続きを表示(約 1,600 文字)
【請求項2】
前記動作指定部は、前記操作者の動きに基づいて操作対象物を把持した把持点が2つの場合、2つの前記把持点のうち一方を前記行動起点とし、2つの前記把持点のうち他方を行動終点とし、
前記軌道生成部は、前記行動起点と前記行動終点との間を、前記エンドエフェクタの制約された軌道とする、
請求項1に記載のロボット遠隔操作制御システム。
【請求項3】
前記軌道生成部は、前記操作者の動きに基づいて推定される対象物体と作業内容に基づいて、動作させる複数の軸方向のうちの少なくとも1つに対して動作させないようにすることで、制約された軌道を生成する、
請求項1または請求項2に記載のロボット遠隔操作制御システム。
【請求項4】
前記操作者の動きに基づいて対象物体と作業内容を推定する意図推定部、を備え、
前記第1制御部と前記第2制御部は、前記意図推定部が推定した推定結果を用いて、制御対象の前記エンドエフェクタそれぞれを制御する、
請求項1または請求項2に記載のロボット遠隔操作制御システム。
【請求項5】
前記第1制御部は、前記意図推定部によって推定された操作意図に基づいて、前記操作者の操作をサポートするように前記エンドエフェクタの動作を制御する、
請求項4に記載のロボット遠隔操作制御システム。
【請求項6】
3以上のエンドエフェクタと、前記エンドエフェクタそれぞれを移動させる移動機構とを有するロボットを遠隔操作制御する遠隔操作制御装置であって、
操作者の動きに応じて、少なくとも1つの前記エンドエフェクタの動作を制御する第1制御部と、
前記操作者の動きに基づいて、前記エンドエフェクタの行動起点を決定し、前記エンドエフェクタの前記行動起点からの動作を指定する動作指定部と、
前記動作指定部が指定した動作から、前記エンドエフェクタの制約された軌道を生成する軌道生成部と、
前記第1制御部が制御しない前記エンドエフェクタのうち少なくとも1つの前記エンドエフェクタを前記軌道上で動作させる第2制御部と、
を備えるロボット遠隔操作制御装置。
【請求項7】
3以上のエンドエフェクタと、前記エンドエフェクタそれぞれを移動させる移動機構とを有するロボットを遠隔操作制御する遠隔操作制御装置の制御方法であって、
第1制御部が、操作者の動きに応じて、少なくとも1つの前記エンドエフェクタの動作を制御し、
動作指定部が、前記操作者の動きに基づいて、前記エンドエフェクタの行動起点を決定し、前記エンドエフェクタの前記行動起点からの動作を指定し、
軌道生成部が、前記動作指定部が指定した動作から、前記エンドエフェクタの制約された軌道を生成し、
第2制御部が、前記第1制御部が制御しない前記エンドエフェクタのうち少なくとも1つの前記エンドエフェクタを前記軌道上で動作させる、
を備えるロボット遠隔操作制御方法。
【請求項8】
3以上のエンドエフェクタと、前記エンドエフェクタそれぞれを移動させる移動機構とを有するロボットを遠隔操作制御する遠隔操作制御装置のコンピュータに、
操作者の動きに応じて、少なくとも1つの前記エンドエフェクタの動作を制御させ、
前記操作者の動きに基づいて、前記エンドエフェクタの行動起点を決定させ、前記エンドエフェクタの前記行動起点からの動作を指定させ、
前記指定された動作から、前記エンドエフェクタの制約された軌道を生成させ、
操作者の動きに応じて制御さる前記エンドエフェクタ以外のうち少なくとも1つの前記エンドエフェクタを前記軌道上で動作させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット遠隔操作制御システム、ロボット遠隔操作制御装置、ロボット遠隔操作制御方法、およびプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
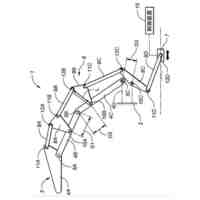
例えば、工場のラインなどで3本以上の複数本のアームを有するロボットが協調して組立を行ったり、医療ロボットが複数本のアームを遠隔操作で切り替えながら手術を施行したりする技術がある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-107721号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、全自動で複数本を制御する従来技術システムでは、柔軟物操作への対応が非常に困難であった。また、従来技術では、遠隔操縦でアームを切り替えながら操作すると、切り替えによる混乱や時間のロスが発生し、また3本以上同時に動かさないと行えない作業に対応できなかった。このように、従来技術では、それぞれがエンドエフェクタを有する3本以上のアームを遠隔操作する際、作業をうまく行えず、効率が悪かった。
【0005】
本発明は、上記の問題点に鑑みてなされたものであって、それぞれがエンドエフェクタを有する3本以上のアームを遠隔操作する際、従来より作業性を向上させることができるロボット遠隔操作制御システム、ロボット遠隔操作制御装置、ロボット遠隔操作制御方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)上記目的を達成するため、本発明の一態様に係るロボット遠隔操作制御システムは、操作者の動きを認識し、ロボットに前記操作者の動きを伝えて前記ロボットを操作するロボット遠隔操作制御システムであって、前記ロボットは3以上のエンドエフェクタと、前記エンドエフェクタそれぞれを移動させる移動機構と、前記操作者の動きに応じて、少なくとも1つの前記エンドエフェクタの動作を制御する第1制御部と、前記操作者の動きに基づいて、前記エンドエフェクタの行動起点を決定し、前記エンドエフェクタの前記行動起点からの動作を指定する動作指定部と、前記動作指定部が指定した動作から、前記エンドエフェクタの制約された軌道を生成する軌道生成部と、前記第1制御部が制御しない前記エンドエフェクタのうち少なくとも1つの前記エンドエフェクタを前記軌道上で動作させる第2制御部と、を備えるロボット遠隔操作制御システムである。
【0007】
(2)上記(1)の一態様に係るロボット遠隔操作制御システムにおいて、前記動作指定部は、前記操作者の動きに基づいて操作対象物を把持した把持点が2つの場合、2つの前記把持点のうち一方を前記行動起点とし、2つの前記把持点のうち他方を行動終点とし、前記軌道生成部は、前記行動起点と前記行動終点との間を、前記エンドエフェクタの制約された軌道とするようにしてもよい。
【0008】
(3)上記(1)または(2)の一態様に係るロボット遠隔操作制御システムにおいて、前記軌道生成部は、前記操作者の動きに基づいて推定される対象物体と作業内容に基づいて、動作させる複数の軸方向のうちの少なくとも1つに対して動作させないようにすることで、制約された軌道を生成するようにしてもよい。
【0009】
(4)上記(1)から(3)のうちのいずれか1つの一態様に係るロボット遠隔操作制御システムにおいて、前記操作者の動きに基づいて対象物体と作業内容を推定する意図推定部、を備え、前記第1制御部と前記第2制御部は、前記意図推定部が推定した推定結果を用いて、制御対象の前記エンドエフェクタそれぞれを制御するようにしてもよい。
【0010】
(5)上記(4)の一態様に係るロボット遠隔操作制御システムにおいて、前記第1制御部は、前記意図推定部によって推定された操作意図に基づいて、前記操作者の操作をサポートするように前記エンドエフェクタの動作を制御するようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
12日前
本田技研工業株式会社
装置
11日前
本田技研工業株式会社
モータ
8日前
本田技研工業株式会社
送電装置
6日前
本田技研工業株式会社
車両構造
8日前
本田技研工業株式会社
車両構造
8日前
本田技研工業株式会社
断続装置
6日前
本田技研工業株式会社
切断装置
4日前
本田技研工業株式会社
会話装置
4日前
本田技研工業株式会社
固体電池
6日前
本田技研工業株式会社
内燃機関
11日前
本田技研工業株式会社
内燃機関
11日前
本田技研工業株式会社
バッテリ
5日前
本田技研工業株式会社
通知装置
11日前
本田技研工業株式会社
ステータ
4日前
本田技研工業株式会社
保管装置
6日前
本田技研工業株式会社
保管装置
6日前
本田技研工業株式会社
保持装置
5日前
本田技研工業株式会社
電解装置
19日前
本田技研工業株式会社
バッテリ
5日前
本田技研工業株式会社
受電装置
6日前
本田技研工業株式会社
リアクトル
11日前
本田技研工業株式会社
鞍乗型車両
18日前
本田技研工業株式会社
リンク機構
4日前
本田技研工業株式会社
放電処理方法
6日前
本田技研工業株式会社
潤滑システム
6日前
本田技研工業株式会社
電源システム
6日前
本田技研工業株式会社
車両制御装置
20日前
本田技研工業株式会社
鞍乗り型車両
4日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
運転制御装置
8日前
本田技研工業株式会社
分離システム
8日前
本田技研工業株式会社
車両制御装置
12日前
本田技研工業株式会社
固体二次電池
18日前
本田技研工業株式会社
車両制御装置
18日前
本田技研工業株式会社
車両制御装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ