TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025108272
公報種別
公開特許公報(A)
公開日
2025-07-23
出願番号
2024002097
出願日
2024-01-10
発明の名称
ステアリングシステム
出願人
トヨタ自動車株式会社
代理人
弁理士法人中部国際特許事務所
主分類
B62D
6/00 20060101AFI20250715BHJP(鉄道以外の路面車両)
要約
【課題】 実用性の高いステアバイワイヤシステムを提供する。
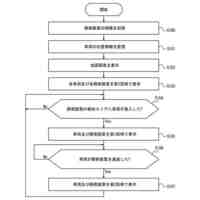
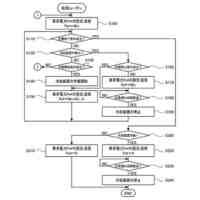
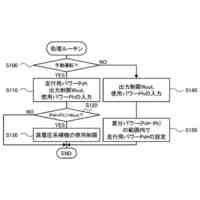
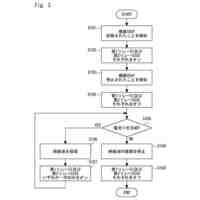
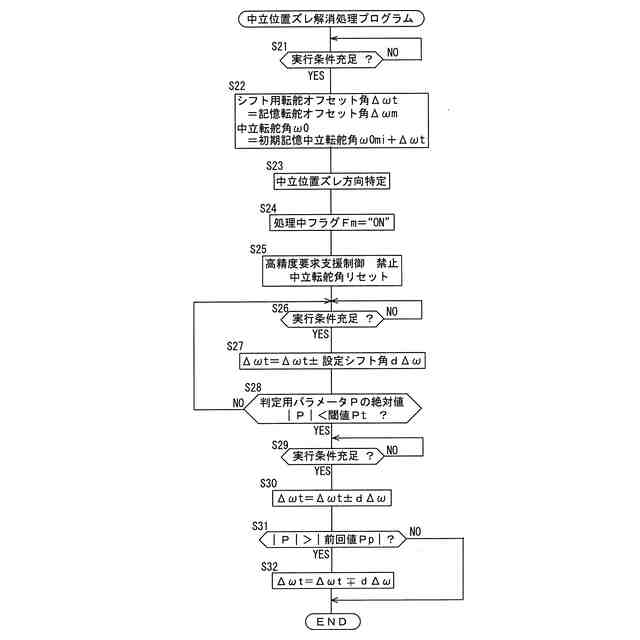
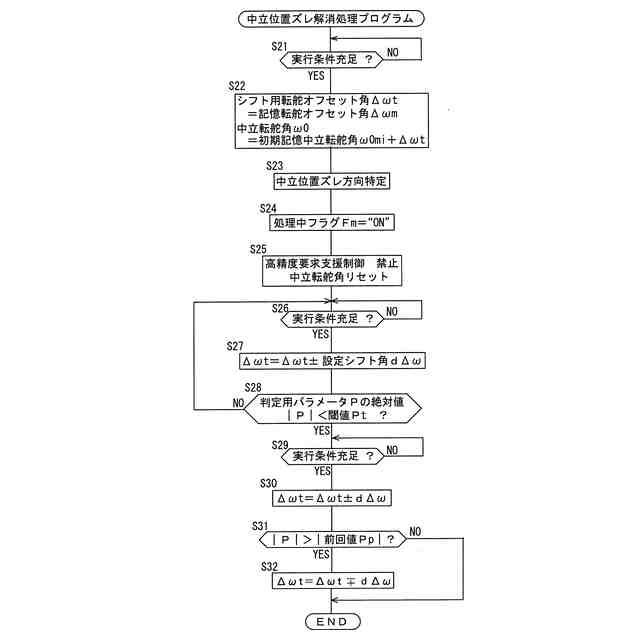
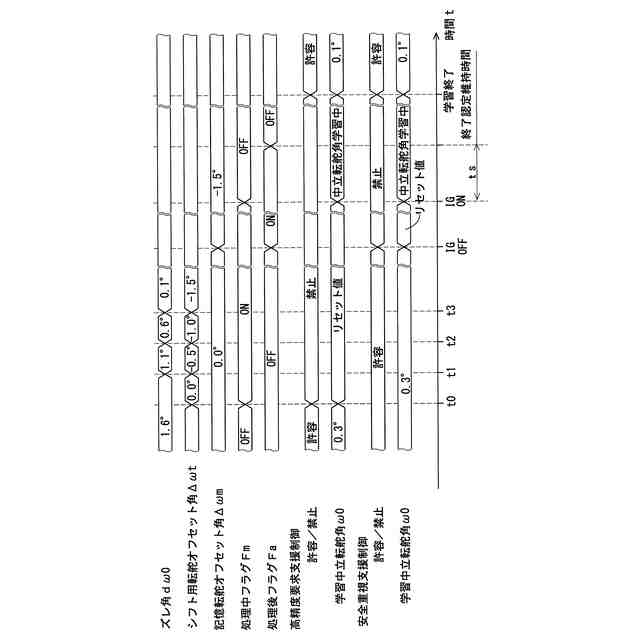
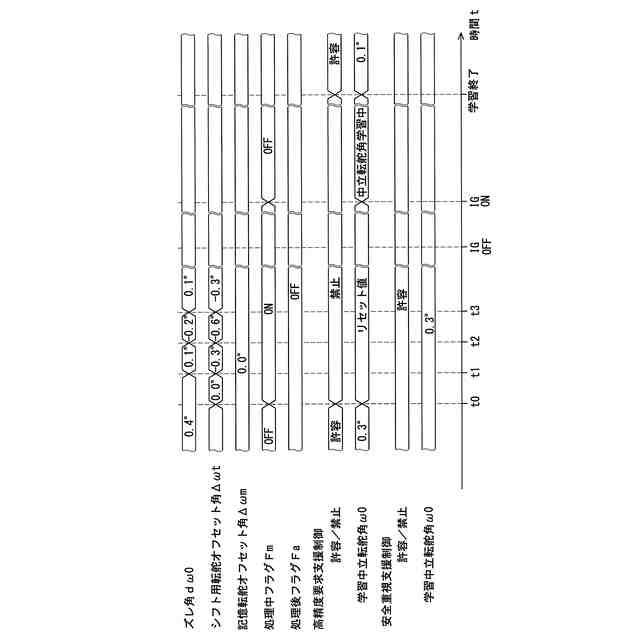
【解決手段】 転舵アクチュエータの制御のために記憶している中立転舵位置である記憶中立位置(ω0mi+Δωm)が、実際の中立転舵位置である実中立位置からズレている場合に、運転者によって車両を直進させるための操作部材の操作が維持されている状態(S26)において、記憶中立位置を実中立位置に近づける(S27)ための中立位置ズレ解消処理を実行するように、ステアバイワイヤシステムを構成する。運転者が車両を直進させている状態で、中立位置ズレ解消処理が実行されるため、その処理は、比較的簡便である。
【選択図】 図5
特許請求の範囲
【請求項1】
運転者によって操作される操作部材と、
動力源を有し、その動力源の力によって車輪を転舵する転舵アクチュエータと、
前記操作部材の操作に応じた車輪の転舵を実現すべく前記転舵アクチュエータを制御するコントローラと
を備えて、車両に搭載されるステアバイワイヤ型のステアリングシステムであって、
前記コントローラが、前記転舵アクチュエータの制御のために記憶している中立転舵位置である記憶中立位置が、実際の中立転舵位置である実中立位置からズレている場合に、運転者によって車両を直進させるための前記操作部材の操作が維持されている状態において、記憶中立位置を実中立位置に近づける中立位置ズレ解消処理を実行するように構成されたステアリングシステム。
続きを表示(約 780 文字)
【請求項2】
前記中立位置ズレ解消処理が、記憶中立位置を実中立位置に向かって漸変させる処理である請求項1に記載のステアリングシステム。
【請求項3】
前記コントローラが、
前記操作部材の操作位置が、車両が直進するときに位置すべき位置である中立操作位置に位置することを条件に、前記中立位置ズレ解消処理を終了させるように構成された請求項1に記載のステアリングシステム。
【請求項4】
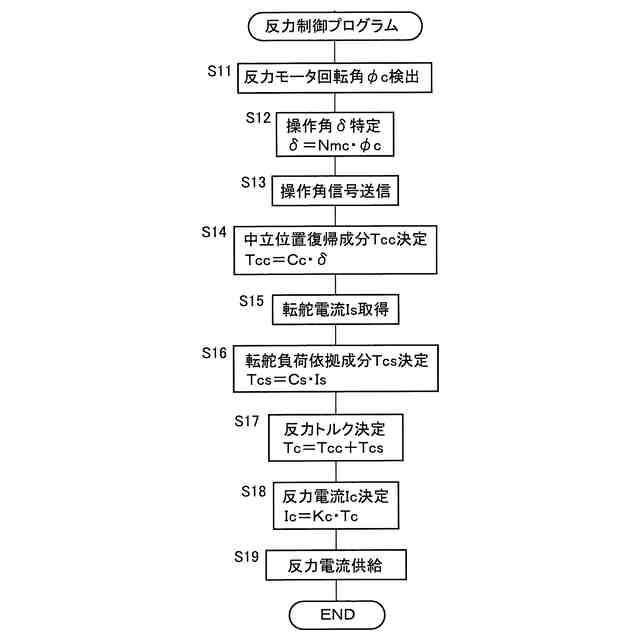
当該ステアリングシステムが、前記操作部材の操作に対する反力である操作反力をその操作部材に付与する操作反力付与装置を備え、
前記コントローラが、
前記操作部材の操作位置を車両が直進するときに位置すべき位置である中立操作位置に復帰させるための成分を含む操作反力を付与するための制御を実行するとともに、
その操作反力が無くなったこと、若しくは、その操作反力に抗する運転者の操作力が無くなったことを条件に、前記中立位置ズレ解消処理を終了させるように構成された請求項1に記載のステアリングシステム。
【請求項5】
当該車両において、それぞれが車輪の自動転舵を伴う複数の運転支援制御が実行され、
当該ステアリングシステムが、それら複数の運転支援制御のうちの少なくとも1つを、前記中立位置ズレ解消処理の実行中においても許容するように構成された請求項1に記載のステアリングシステム。
【請求項6】
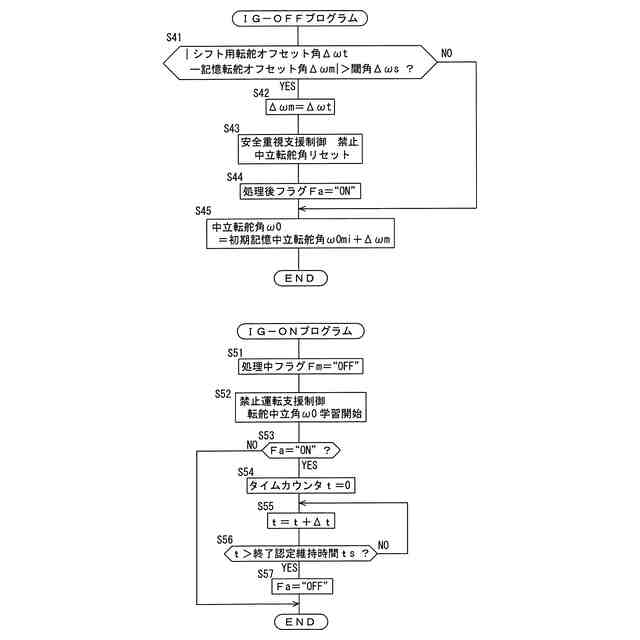
前記複数の運転支援制御が、中立転舵位置の精度よりも車両走行の安全性を優先することを目的とする安全重視支援制御を含み、
当該ステアリングシステムが、少なくとも前記安全重視支援制御を、中立位置ズレ解消処理の実行中においても許容するように構成された請求項5に記載のステアリングシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両に搭載されるステアバイワイヤ型のステアリングシステムに関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
車両に搭載されるステアバイワイヤ型のステアリングシステム(以下、「ステアバイワイヤシステム」という場合がある)では、一般的に、ステアリングホイール等の操作部材と転舵される車輪とが、機械的に連結されていない。そのため、運転者によって操作部材に加えられる力(以下、「操作力」という場合がある)に依らず、転舵アクチュエータの動力源の力によって、その車輪が転舵される。ステアバイワイヤシステムにおいて、車輪の転舵は、主に、操作部材の操作に応じて行われるため、操作部材の操作位置と、車輪の転舵位置との関係は、車輪の転舵についての制御(以下、「転舵制御」という場合がある)において、重要である。具体的に言えば、車両が直進するときに位置すべき操作部材の操作位置を、中立操作位置と定義した場合、操作部材がその中立操作位置に位置するときに、転舵される車輪の姿勢も、直進するときの姿勢となるべきである。すなわち、車輪の転舵位置も、中立転舵位置に位置すべきなのである。
【0003】
転舵制御を実行するコントローラは、上記中立操作位置および中立転舵位置を記憶しており、それら記憶されている中立操作位置と中立転舵位置とに基づいて、転舵制御を実行する。しかしながら、転舵される車輪のトー角調整を行った場合や、転舵される車輪に比較的大きな力が外部から加わった場合等には、記憶されている中立転舵位置である記憶中立位置が、実際の中立転舵位置からズレる可能性もある。このズレ(以下、「中立位置ズレ」という場合がある)が生じると、運転者による操作部材の操作に対して適正な転舵輪の転舵が行われなかったり、その操作に対する違和感を運転者に与えること等も予想される。そこで、ステアバイワイヤシステムでは、例えば、下記特許文献に記載されているような処理が検討されている。その処理は、目標走行線を車両が走行するように車輪を転舵する目標走行線追従制御において、目標走行線に基づく目標転舵位置と、センサによって検出される転舵位置との差に基づいて、中立転舵位置を設定するという技術である。
【先行技術文献】
【特許文献】
【0004】
特開2018-177128号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献に記載されている技術は、運転支援制御の1つである目標走行線追従制御に関するものであり、中立転舵位置の設定に対して、ある程度高い精度が要求される。一方で、車両安定化制御,車線逸脱防止制御等、安全のために転舵輪を転舵する運転支援制御もあり、それらの制御は、目標走行線追従制御を実行して精度の高い中立転舵位置を取得する前であっても、つまり、ある程度の中立位置ズレのある状態であっても、実行することが望まれる。また、目標走行線追従制御における上記中立転舵位置の設定は、複雑な手法,学習等に基づくものであり、そのような設定に代えて、簡便に、中立位置ズレを解消することも望まれている。つまり、簡便に中立位置ズレを解消できれば、ステアバイワイヤシステムの実用性は向上すると考えられる。本発明は、そのような実情に鑑みてなされたものであり、実用性の高いステアバイワイヤ型の車両用ステアリングシステムを提供することを課題とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のステアリングシステムは、
運転者によって操作される操作部材と、
動力源を有し、その動力源の力によって車輪を転舵する転舵アクチュエータと、
前記操作部材の操作に応じた車輪の転舵を実現すべく前記転舵アクチュエータを制御するコントローラと
を備えて、車両に搭載されるステアバイワイヤ型のステアリングシステムであって、
前記コントローラが、前記転舵アクチュエータの制御のために記憶している中立転舵位置である記憶中立位置が、実際の中立転舵位置である実中立位置からズレている場合に、運転者によって車両を直進させるための前記操作部材の操作が維持されている状態において、記憶中立位置を実中立位置に近づける中立位置ズレ解消処理を実行するように構成される。
【発明の効果】
【0007】
本発明のステアリングシステムでは、運転者が車両を直進させている状態で、上記中立位置ズレ解消処理が実行されるため、その処理は、比較的簡便である。その結果、本発明のステアリングシステムは、実用性の高いものとなる。
【発明の概要】
発明の態様
【0008】
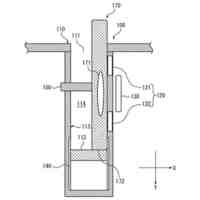
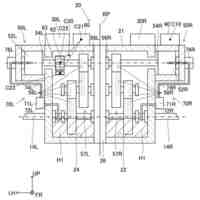
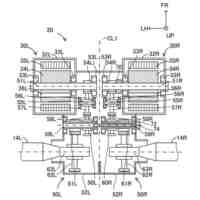
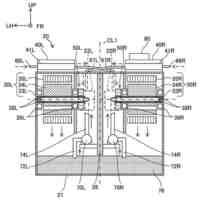
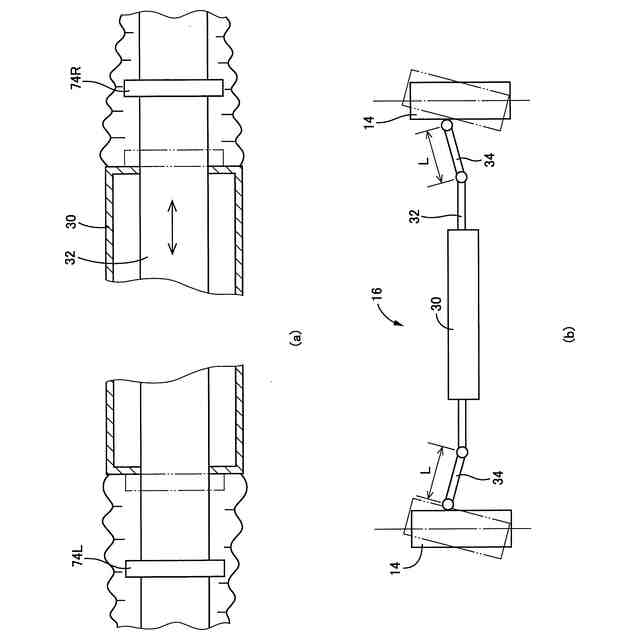
本発明における「操作部材」は、ステアリングホイールが一般的なものであるが、ハンドル,操縦桿,ジョイスティック等、種々のものであってよい。本発明のステアリングシステムは、ステアバイワイヤシステムであり、一般的には、「転舵アクチュエータ」は操作部材と機械的に連結されていない。そのため、転舵アクチュエータは、電動モータ,油圧シリンダ等の「動力源(「駆動源」と呼ぶこともできる)」を有し、運転者が操作部材に加える力(以下、「操作力」という場合がある)に依らず、その動力源の力によって車輪を転舵する。転舵アクチュエータは、その構造が特に限定されないが、たとえば、左右1対の車輪が転舵される車両においては、それらの車輪をそれぞれ保持する1対のステアリングナックルを連結する転舵ロッドを有し、その転舵ロッドを左右に動かすような構造のものであってよい。そのような構造の転舵アクチュエータを備えたステアリングシステムでは、例えば、転舵ロッドの端部とステアリングナックルとの間に車輪のトー角を調整する機構が設けられており、その機構によって、トー角が調整される。そのようなトー角調整を行えば、実際の中立転舵位置が変化する可能性が高い。したがって、上記中立位置ズレ解消処理は、トー角の調整後において実行する意義が大きい。
【0009】
「転舵位置」は、狭義において、転舵される車輪の姿勢(例えば、「回動位置」,「トー角」等)を意味するが、本発明のステアリングシステムでは、広義に解釈し、転舵アクチュエータの動作位置をも意味する。したがって、「中立転舵位置」は、車両が直進するときにとるべき車輪の姿勢、若しくは、転舵アクチュエータの動作位置を意味する。具体的には、例えば、車両が直進している状態での、転舵される車輪のトー角(転舵される車輪が1対の場合は、それら車輪各々のトー角)や、上記構造の転舵アクチュエータにおける転舵ロッドの動作位置等が、中立転舵位置に該当する。同様に、操作部材に関しても、その操作部材の位置(例えば、操作部材がステアリングホイールの場合におけるそのステアリングホイールの回転角)を、「操作位置」と呼び、車両を直進させようとするときの操作位置を、「中立操作位置」と呼ぶこととする。
【0010】
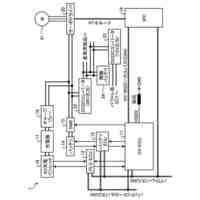
ステアバイワイヤシステムでは、運転者の操作部材の操作によって、車輪が転舵される。つまり、運転者の操作部材の操作に基づいて、車輪の転舵の制御(以下、「転舵制御」という場合がある)が実行される。この転舵制御では、例えば、操作部材が中立操作位置に位置するときに、転舵位置が中立転舵位置とされ、操作部材が中立操作位置からある操作量だけ操作されたときに、その操作量に応じた転舵量だけ、中立転舵位置から転舵位置が変化させられる。この転舵制御は、「コントローラ」によって実行される。ちなみに、コントローラは、例えば、コンピュータを主体とし、転舵アクチュエータのドライバ(駆動回路)を含んで構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
方法
20日前
トヨタ自動車株式会社
方法
3日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
方法
17日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
膜体
5日前
トヨタ自動車株式会社
充電器
17日前
トヨタ自動車株式会社
モータ
17日前
トヨタ自動車株式会社
モータ
19日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
電動車
20日前
トヨタ自動車株式会社
充電器
20日前
トヨタ自動車株式会社
移動体
19日前
トヨタ自動車株式会社
電源装置
19日前
トヨタ自動車株式会社
駆動装置
19日前
トヨタ自動車株式会社
制御装置
20日前
トヨタ自動車株式会社
駆動装置
19日前
トヨタ自動車株式会社
駆動装置
19日前
トヨタ自動車株式会社
電動車両
11日前
トヨタ自動車株式会社
電動車両
5日前
トヨタ自動車株式会社
電動車両
20日前
トヨタ自動車株式会社
制御装置
19日前
トヨタ自動車株式会社
評価方法
5日前
トヨタ自動車株式会社
駆動装置
20日前
トヨタ自動車株式会社
コネクタ
19日前
トヨタ自動車株式会社
燃料電池
17日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
コネクタ
5日前
トヨタ自動車株式会社
接続構造
24日前
トヨタ自動車株式会社
充電設備
5日前
トヨタ自動車株式会社
車両構造
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ