TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025109793
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2025078187,2023104907
出願日
2025-05-08,2020-01-31
発明の名称
車両
出願人
トヨタ自動車株式会社
代理人
弁理士法人深見特許事務所
主分類
B60W
30/00 20060101AFI20250717BHJP(車両一般)
要約
【課題】自動運転中の車輪の固定を適切なタイミングで実施する。
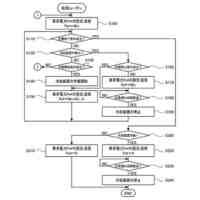
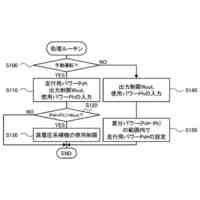
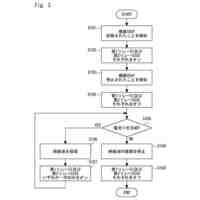
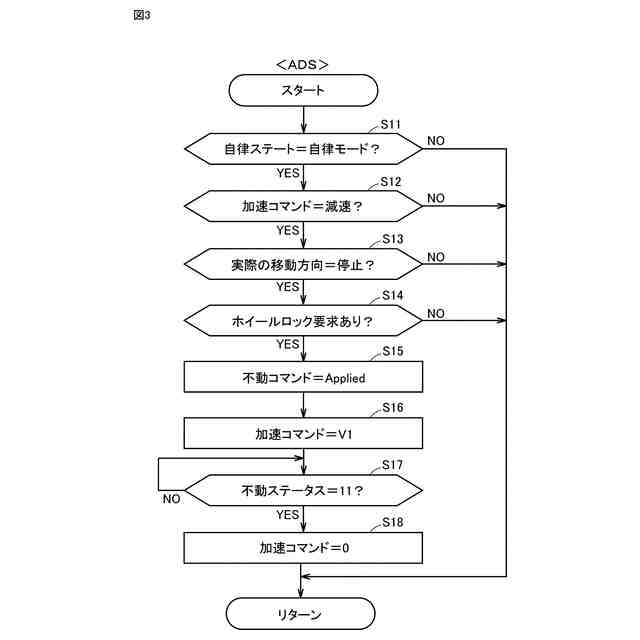
【解決手段】ADSは、自律ステートが自律モードであって(S11にてYES)、加速コマンドが減速を示す値であって(S12にてYES)、実際の移動方向が停止状態を示し(S13にてYES)、ホイールロック要求がある場合(S14にてYES)、不動コマンドを“Applied”に設定するステップ(S15)と、加速コマンドをV1に設定するステップ(S16)と、不動ステータスが“11”に設定される場合(S17にてYES)、加速コマンドをゼロに設定するステップ(S18)を含む、処理を実行する。
【選択図】図3
特許請求の範囲
【請求項1】
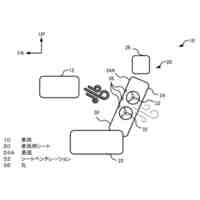
自動運転システムを搭載可能な車両であって、
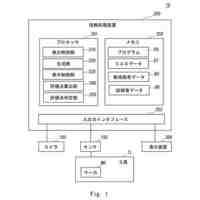
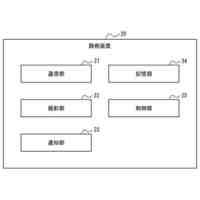
前記自動運転システムからのコマンドに従って車両制御を実行する車両プラットフォームと、
前記自動運転システムと前記車両プラットフォームとの間のインターフェースを行なう車両制御インターフェースとを備え、
前記自動運転システムから前記車両プラットフォームへは、加速値または減速値を要求する第1コマンドと、前記車両の不動化を要求する第2コマンドとが前記車両制御インターフェースを介して送信され、
前記車両プラットフォームから前記自動運転システムへは、前記車両の停止状態を示すシグナルが前記車両制御インターフェースを介して送信され、
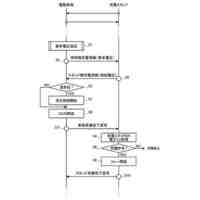
前記車両プラットフォームは、前記第1コマンドによって前記車両プラットフォームに減速が要求される場合、前記車両が停止したときに前記シグナルを前記自動運転システムに送信し、前記シグナルを送信した後に受信する前記第2コマンドによって前記車両の不動化を実施する、車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動運転中の車両の制御に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
近年、ユーザの操作を必要とせずに車両を走行させる自動運転システムの開発が進められている。自動運転システムは、たとえば、既存の車両に搭載可能にするためにインターフェースを介して車両とは別個に設けられる場合がある。
【0003】
このような自動運転システムとして、たとえば、特開2018-132015号公報(特許文献1)には、車両の動力を管理するECU(Electronic Control Unit)と自動運転用のECUを独立させることで、既存の車両プラットフォームに大きな変更を加えることなく、自動運転機能を付加することができる技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-132015号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車両の自動運転中においては、ユーザによる操作が行なわれないため、車両が駐車した場合のパーキングブレーキやパーキングロック等を用いた車輪の固定を適切なタイミングで実施することが求められる。
【0006】
本開示は、上述した課題を解決するためになされたものであって、その目的は、自動運転システムが搭載可能であって、自動運転中の車輪の固定を適切なタイミングで実施する車両を提供することである。
【課題を解決するための手段】
【0007】
本開示のある局面に係る車両は、自動運転システムを搭載可能な車両である。この車両は、自動運転システムからのコマンドに従って車両制御を実行する車両プラットフォームと、自動運転システムと車両プラットフォームとの間のインターフェースを行なう車両制御インターフェースとを備える。自動運転システムから車両プラットフォームへは、加速値または減速値を要求する第1コマンドと、車両の不動化を要求する第2コマンドとが車両制御インターフェースを介して送信される。車両プラットフォームから自動運転システムへは、車両の停止状態を示すシグナルが車両制御インターフェースを介して送信される。車両プラットフォームは、第1コマンドによって車両プラットフォームに減速が要求される場合、車両が停止したときにシグナルを自動運転システムに送信する。車両プラットフォームは、シグナルを送信した後に受信する第2コマンドによって車両の不動化を実施する。
【0008】
このようにすると、停止状態を示すシグナルを送信した後に、車両の不動化を要求する第2コマンドによって車両の不動化が実施されるので、車両が停止した場合の車輪の固定を適切なタイミングで実施することができる。
【0009】
ある実施の形態においては、第2コマンドによって車両の不動化が要求されるまでは、第1コマンドによって一定の減速値が要求される。
【0010】
このようにすると、車両の不動化が要求されるまでは、一定の減速値が要求されるので、車両の移動を制限することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
方法
19日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
方法
16日前
トヨタ自動車株式会社
膜体
4日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
充電器
16日前
トヨタ自動車株式会社
移動体
18日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
充電器
19日前
トヨタ自動車株式会社
モータ
18日前
トヨタ自動車株式会社
駆動装置
18日前
トヨタ自動車株式会社
駆動装置
18日前
トヨタ自動車株式会社
駆動装置
18日前
トヨタ自動車株式会社
コネクタ
18日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
コネクタ
4日前
トヨタ自動車株式会社
充電設備
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
評価方法
4日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
電動車両
10日前
トヨタ自動車株式会社
電極触媒
17日前
トヨタ自動車株式会社
燃料電池
16日前
トヨタ自動車株式会社
路側装置
16日前
トヨタ自動車株式会社
充電方法
16日前
トヨタ自動車株式会社
電源装置
18日前
トヨタ自動車株式会社
電動車両
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ