TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025107842
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024001330
出願日
2024-01-09
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B64U
10/50 20230101AFI20250714BHJP(航空機;飛行;宇宙工学)
要約
【課題】カイトの墜落を抑制する。
【解決手段】制御装置は、空力特性を変更可能な空力特性変更手段を備えるカイトの姿勢に基づいて、カイトがダイブモードであるか否かを判定する判定手段と、カイトがダイブモードであると判定された場合に、カイトの現在の旋回方向とは逆方向にカイトが旋回するように空力特性変更手段を制御する制御手段と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
空力特性を変更可能な空力特性変更手段を備えるカイトの姿勢に基づいて、前記カイトがダイブモードであるか否かを判定する判定手段と、
前記カイトがダイブモードであると判定された場合に、前記カイトの現在の旋回方向とは逆方向に前記カイトが旋回するように前記空力特性変更手段を制御する制御手段と、
を備えることを特徴とする制御装置。
続きを表示(約 560 文字)
【請求項2】
前記カイトがダイブモードであると判定された後の前記カイトの姿勢に基づいて、前記判定手段は、前記カイトがダイブモードを脱したか否かを判定する
ことを特徴とする請求項1に記載の制御装置。
【請求項3】
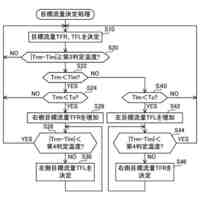
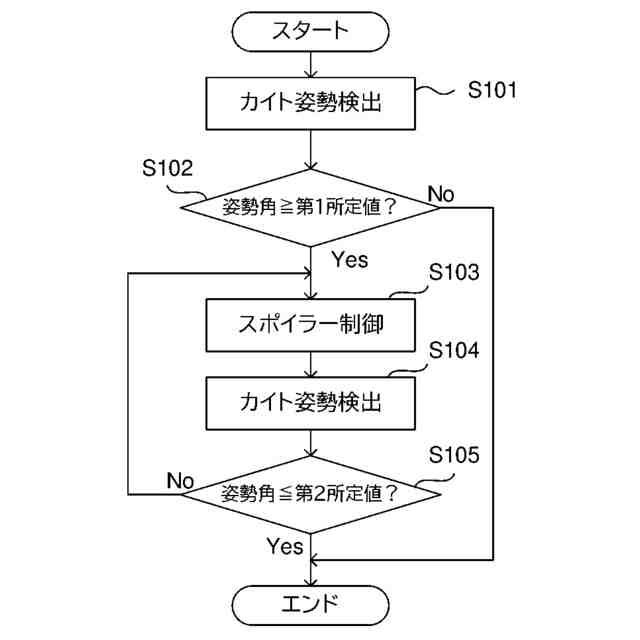
前記判定手段は、前記カイトの姿勢を示す姿勢角が第1所定値以上である場合に、前記カイトがダイブモードであると判定し、
前記カイトがダイブモードであると判定された後、前記姿勢角が、前記第1所定値より小さい第2所定値以下になった場合に、前記判定手段は、前記カイトがダイブモードを脱したと判定する
ことを特徴とする請求項2に記載の制御装置。
【請求項4】
前記カイトがダイブモードであると判定された場合、前記カイトの飛行高度が所定高度以下であることを条件に、前記制御手段は、前記カイトを係留するテザーの張力を小さくする
ことを特徴とする請求項1に記載の制御装置。
【請求項5】
前記カイトがダイブモードであると判定された場合、前記制御手段は、風に起因する前記カイトの変形の程度とに基づいて、前記カイトの現在の旋回方向とは逆方向に前記カイトが旋回するように前記空力特性変更手段を制御する
ことを特徴とする請求項1に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、カイトの制御装置の技術分野に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
この種の装置として、例えば、カイト翼の面積を変更することで空力特性を変更可能な可変翼カイトを制御する装置が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2020-147266号広報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術には改善の余地がある。
【0005】
本発明は、例えば、上記事情に鑑みてなされたものであり、カイトの墜落を抑制することができる制御装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る制御装置は、空力特性を変更可能な空力特性変更手段を備えるカイトの姿勢に基づいて、前記カイトがダイブモードであるか否かを判定する判定手段と、前記カイトがダイブモードであると判定された場合に、前記カイトの現在の旋回方向とは逆方向に前記カイトが旋回するように前記空力特性変更手段を制御する制御手段と、を備えるというものである。
【図面の簡単な説明】
【0007】
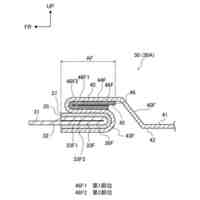
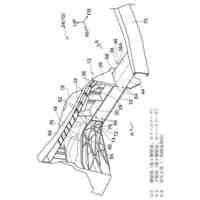
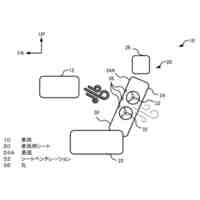
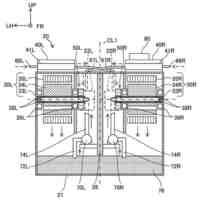
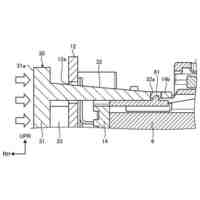
カイトの一例を示す図である。
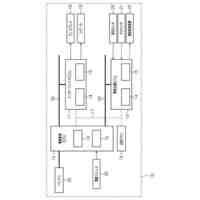
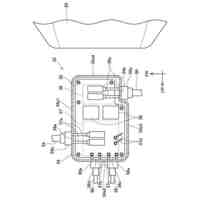
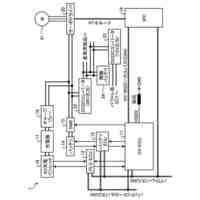
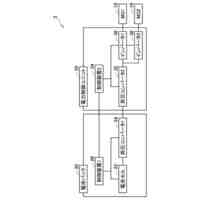
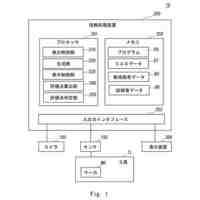
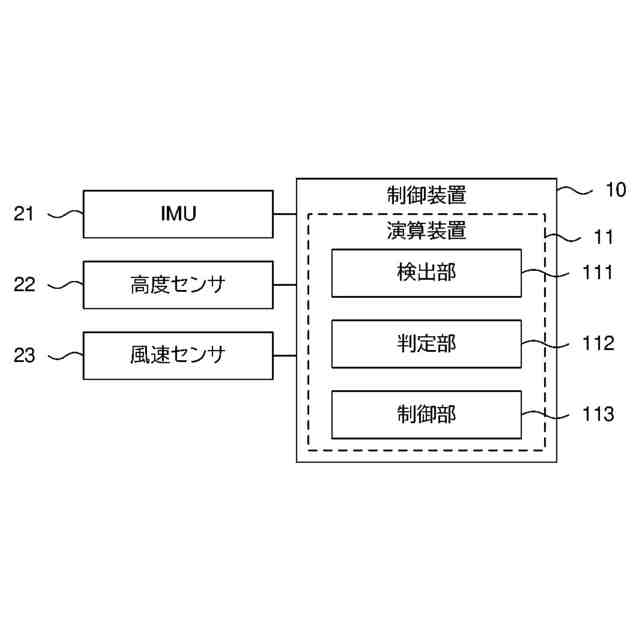
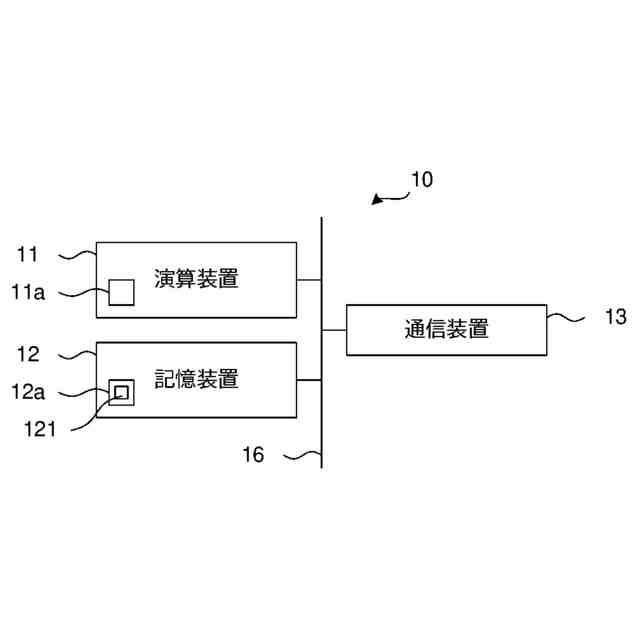
実施形態に係る制御装置の構成の一例を示すブロック図である。
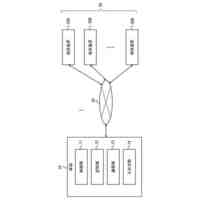
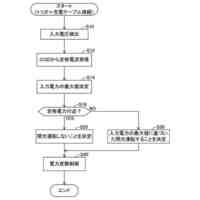
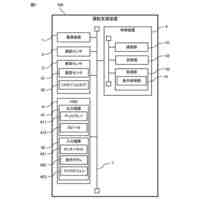
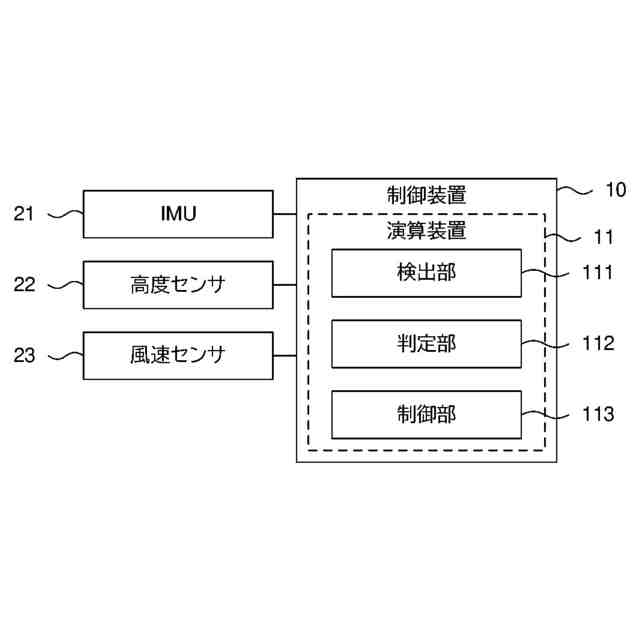
実施形態に係る演算装置の構成の一例を示すブロック図である。
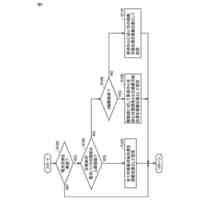
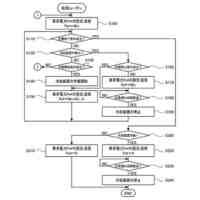
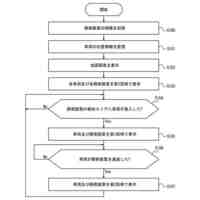
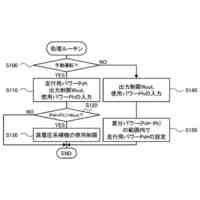
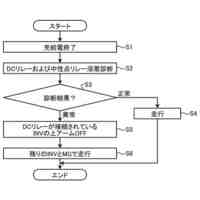
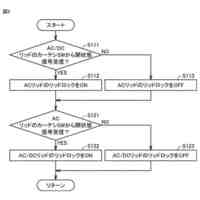
実施形態に係る制御装置の動作を示すフローチャートである。
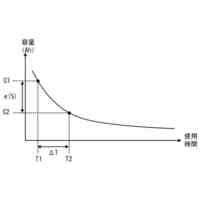
実施形態に係る制御装置の効果を説明するための図である。
【発明を実施するための形態】
【0008】
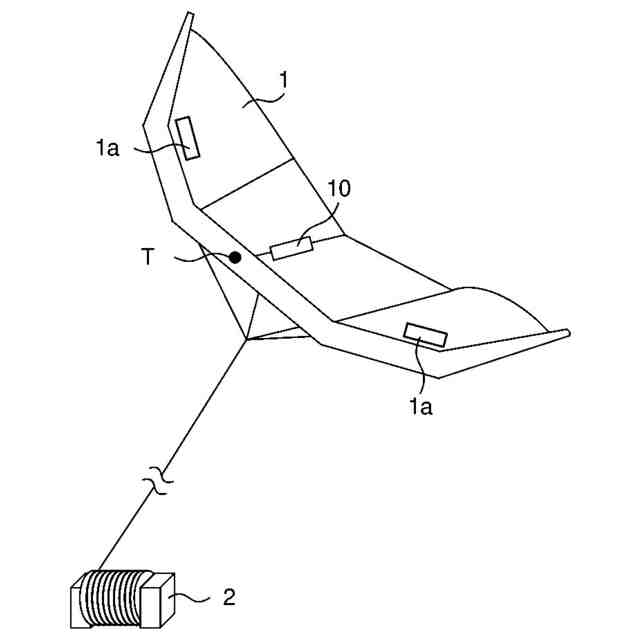
制御装置に係る実施形態について図1乃至図5を参照して説明する。図1において、カイト1は、テザー(凧糸)によって、テザーが巻き回されているドラムを有する設備2に係留されている。カイト1は、カイト1の空力特性を変更可能なスポイラー(可動板)1aを有する。カイト1は、風見安定性を有する(言い換えれば、風見鶏効果を得られる)形状に構成されている。カイト1は、例えばインフレータブルカイトであってよい。ただし、カイト1は、インフレータブルカイトに限定されない。尚、設備2は、地面に設置されていてもよいし、構造物に設置されていてもよいし、例えば車両や船舶等の上記ドラムを運搬可能なものに設置されていてもよい。
【0009】
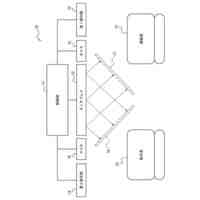
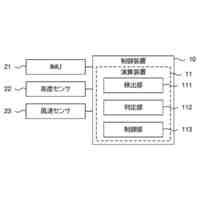
カイト1には、制御装置10が取り付けられている。尚、制御装置10は、カイト1に取り付けられていなくてもよい。例えば、設備2が制御装置10を有していてもよい。制御装置10について図2を参照して説明する。図2において、制御装置10は、演算装置11、記憶装置12及び通信装置13を備える。演算装置11、記憶装置12及び通信装置13は、データバス16を介して接続されていてよい。尚、制御装置10は、演算装置11、記憶装置12及び通信装置13に加えて、入力装置及び出力装置の少なくとも一方を備えていてよい。
【0010】
演算装置11は、プロセッサ11aを有していてよい。尚、演算装置11は、プロセッサ11aに加えて、他のプロセッサを有していてよい。つまり、演算装置11は、1以上のプロセッサを有していてよい。尚、プロセッサ11aは、マルチコアプロセッサであってよい。演算装置11が、マルチコアプロセッサである単一のプロセッサ11aを有する場合、演算装置11は、論理的に、複数のプロセッサを有していると言える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
膜体
6日前
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
方法
28日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
方法
21日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
25日前
トヨタ自動車株式会社
方法
18日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電極体
26日前
トヨタ自動車株式会社
電動車
27日前
トヨタ自動車株式会社
移動体
20日前
トヨタ自動車株式会社
充電器
18日前
トヨタ自動車株式会社
電動車
21日前
トヨタ自動車株式会社
モータ
27日前
トヨタ自動車株式会社
モータ
18日前
トヨタ自動車株式会社
充電器
21日前
トヨタ自動車株式会社
電動車
20日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
車載装置
28日前
トヨタ自動車株式会社
燃料電池
18日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
電動車両
12日前
トヨタ自動車株式会社
駆動装置
21日前
トヨタ自動車株式会社
制御装置
26日前
トヨタ自動車株式会社
評価方法
6日前
トヨタ自動車株式会社
接続構造
25日前
トヨタ自動車株式会社
制御装置
27日前
トヨタ自動車株式会社
制御装置
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ