TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025114205
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2024008742
出願日
2024-01-24
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
40/04 20060101AFI20250729BHJP(車両一般)
要約
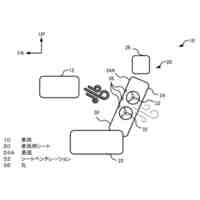
【課題】検出された移動物体の将来の状態を正しく推定し、推定された移動物体の将来の状態に基づいて、時間的な余裕をもって車両の制御を行える車両制御装置を提供する。
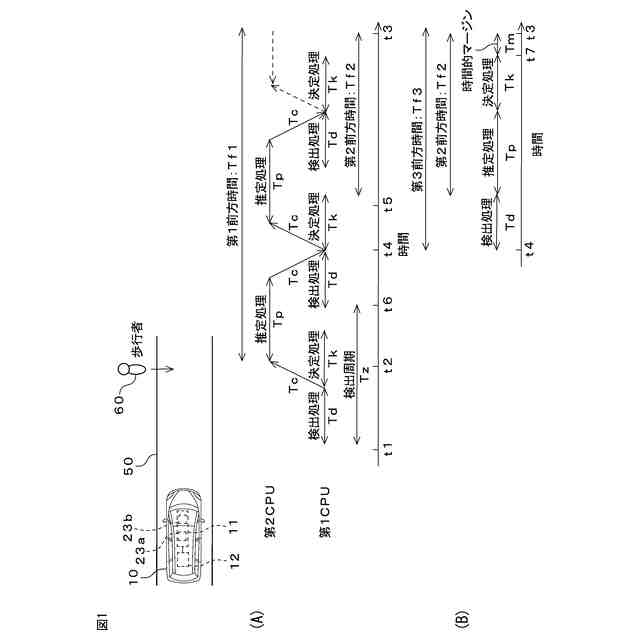
【解決手段】車両制御装置は、車両の周囲の環境を表す環境情報に基づいて、移動物体を検出する検出部と、検出部によって検出された移動物体を表す検出情報に基づいて、第1前方時間が経過した推定時刻における移動物体の状態を推定する第1推定部と、第1推定部によって推定された移動物体の状態に基づいて、車両の制御を決定する決定部と、を有し、第1前方時間は、第1推定部が移動物体の状態を推定するのに要する代表的な推定時間と、第1推定部によって推定された移動物体の状態が決定部へ通知されるのに要する代表的な通知時間と、決定部によって車両の制御を決定するのに要する代表的な決定時間と、決定部によって決定された制御を実行可能な第2前方時間との和である。
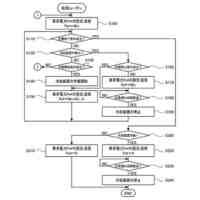
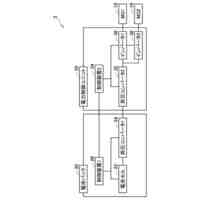
【選択図】図2
特許請求の範囲
【請求項1】
車両の周囲の環境を表す環境情報に基づいて、移動物体を検出する検出部と、
前記検出部によって検出された移動物体を表す検出情報に基づいて、第1前方時間が経過した推定時刻における移動物体の状態を推定する第1推定部と、
前記第1推定部によって推定された移動物体の状態に基づいて、車両の制御を決定する決定部と、
を有し、
前記第1前方時間は、前記第1推定部が移動物体の状態を推定するのに要する代表的な推定時間と、前記第1推定部によって推定された移動物体の状態が前記決定部へ通知されるのに要する代表的な通知時間と、前記決定部によって車両の制御を決定するのに要する代表的な決定時間と、前記決定部によって決定された制御を実行可能な第2前方時間との和である、ことを特徴とする車両制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記検出部は、所定の検出周期を有する検出時刻に、移動物体を検出することを開始し、前記第1推定部において移動物体の状態を推定する処理の少なくとも一部は、次の前記検出周期における前記検出時刻において前記検出部が移動物体を検出する処理と並列して行われ、
次の前記検出周期における前記検出時刻において前記検出部によって検出された移動物体を表す検出情報に基づいて、一つ前の前記検出周期における前記検出時刻において前記検出部によって検出された移動物体を表す検出情報に基づいて前記第1推定部によって推定された移動物体の状態が正しいか否かを判定する判定部を有する、請求項1に記載の車両制御装置。
【請求項3】
次の前記検出周期における前記検出時刻において前記検出部によって検出された移動物体を表す検出情報に基づいて、前記推定時刻の移動物体の状態を、前記第1推定部よりも短い時間で推定する第2推定部を有し、
前記判定部によって、推定された移動物体の状態が正しいと判定された場合、前記決定部は、前記第1推定部によって推定された移動物体の状態に基づいて、車両の制御を決定し、且つ、
前記判定部によって、推定された移動物体の状態が正しくないと判定された場合、前記決定部は、前記第2推定部によって推定された移動物体の状態に基づいて、車両の制御を決定する、請求項2に記載の車両制御装置。
【請求項4】
前記第1推定部は、学習した識別器を用いて移動物体の状態を推定し、前記第2推定部は、線形予測を用いて移動物体の状態を推定する、請求項3に記載の車両制御装置。
【請求項5】
前記第1前方時間は、
前記決定部によって車両の制御を決定する処理が開始される時刻に前記検出部によって移動物体を検出する処理が開始されたと仮定した場合に、前記検出部によって検出された移動物体を表す検出情報に基づいて、前記第1推定部によって移動物体の状態が推定される前記推定時刻と、前記検出部によって移動物体を検出する処理が開始される時刻との間の第3前方時間と、
前記代表的な推定時間と、前記代表的な通知時間と、前記代表的な決定時間との和から、前記検出部が移動物体を検出するのに要する代表的な検出時間が減算して得られる、請求項1~4の何れか一項に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
車両に搭載される制御装置は、車両の周囲の物体を検出する。制御装置は、検出された物体と、車両との間に安全な距離を維持するように車両を制御する。
【0003】
制御装置は、移動物体を検出した場合、移動物体の過去の位置及び速度等に基づいて、移動物体の将来の位置を推定する(例えば、特許文献1参照)。移動物体の将来の位置が、車両の前方にある場合、制御装置は、ドライバに警告を通知したり、車両を停止したりする。
【先行技術文献】
【特許文献】
【0004】
特開2019-128614号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
移動物体の将来の位置を推定する処理は、比較的時間を要する。この処理の間にも、車両と移動物体とが接近していると、車両の制御を行うのに時間的な余裕のない場合があった。
【0006】
そこで、物体を検出する検出時刻を、物体の将来の位置が推定される推定時刻に対して、十分に前の時刻とすることが好ましい。この場合、検出時刻を推定時刻に対してどの位前にするのかが問題となる。
【0007】
検出時刻と推定時刻との間が短いと、車両の制御を行うのに時間的な余裕がなくなるので、車両の安全を確保できないおそれがある。一方、検出時刻と推定時刻との間が長いと、移動物体の将来の位置の推定精度が低下するので、やはり、車両の安全を確保できないおそれがある。
【0008】
そこで、本開示では、検出された移動物体の将来の状態を正しく推定し、推定された移動物体の将来の状態に基づいて、時間的な余裕をもって車両の制御を行える車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
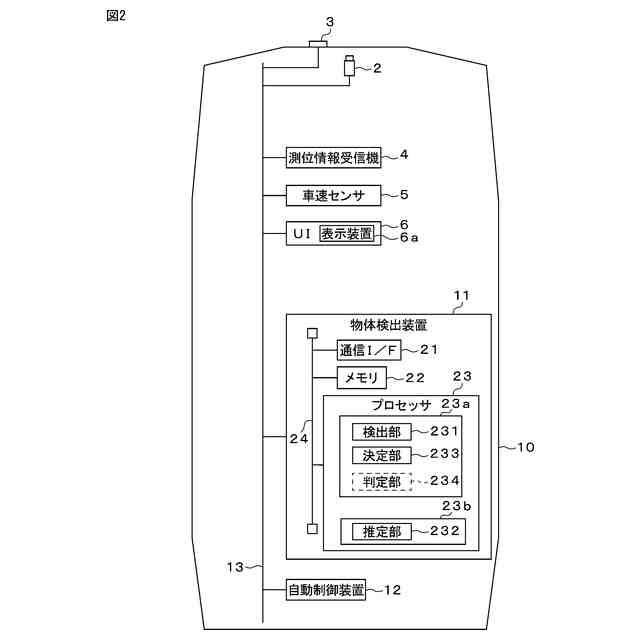
(1)一の実施形態によれば、車両制御装置が提供される。この車両制御装置は、車両の周囲の環境を表す環境情報に基づいて、移動物体を検出する検出部と、検出部によって検出された移動物体を表す検出情報に基づいて、第1前方時間が経過した推定時刻における移動物体の状態を推定する第1推定部と、第1推定部によって推定された移動物体の状態に基づいて、車両の制御を決定する決定部と、を有し、第1前方時間は、第1推定部が移動物体の状態を推定するのに要する代表的な推定時間と、第1推定部によって推定された移動物体の状態が決定部へ通知されるのに要する代表的な通知時間と、決定部によって車両の制御を決定するのに要する代表的な決定時間と、決定部によって決定された制御を実行可能な第2前方時間との和である、ことを特徴とする。
【0010】
(2)(1)の車両制御装置において、検出部は、所定の検出周期を有する検出時刻に、移動物体を検出することを開始し、第1推定部において移動物体の状態を推定する処理の少なくとも一部は、次の検出周期における検出時刻において検出部が移動物体を検出する処理と並列して行われ、次の検出周期における検出時刻において検出部によって検出された移動物体を表す検出情報に基づいて、一つ前の検出周期における検出時刻において検出部によって検出された移動物体を表す検出情報に基づいて第1推定部によって推定された移動物体の状態が正しいか否かを判定する判定部を有することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
膜体
15日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
方法
27日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
車両
29日前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
充電器
27日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
モータ
27日前
トヨタ自動車株式会社
モータ
29日前
トヨタ自動車株式会社
移動体
29日前
トヨタ自動車株式会社
減圧弁
2日前
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
電動車
29日前
トヨタ自動車株式会社
自動車
7日前
トヨタ自動車株式会社
充電器
1か月前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
光電極
今日
トヨタ自動車株式会社
モータ
6日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
車両構造
12日前
トヨタ自動車株式会社
接続構造
5日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
制御装置
5日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ