TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025115490
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024009964
出願日
2024-01-26
発明の名称
到達可能範囲描画装置、表示装置、プログラム
出願人
株式会社 ミックウェア
代理人
個人
主分類
G01C
21/26 20060101AFI20250731BHJP(測定;試験)
要約
【課題】簡易に移動体の到達可能範囲を描画する到達可能範囲描画装置等を提供する。
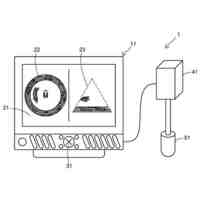
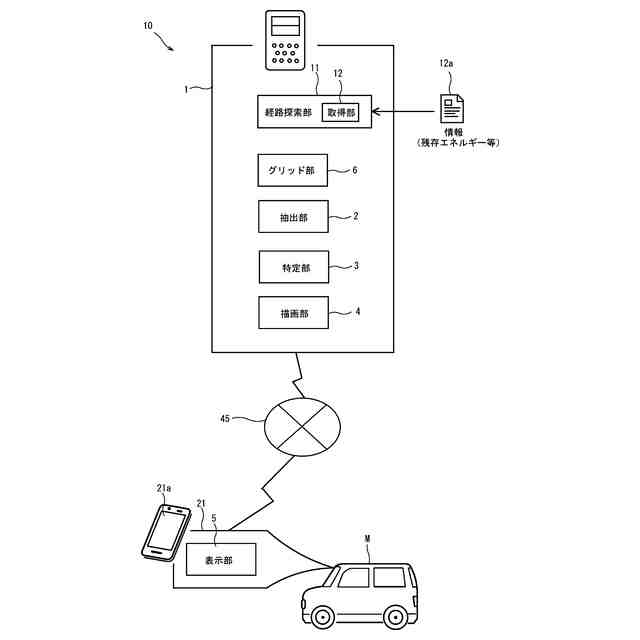
【解決手段】到達可能範囲描画装置1は、移動体Mの保持するエネルギーで移動可能な経路を示す道路地図14が、複数の矩形領域15で区分されており、移動可能な経路13を含む矩形領域を経路領域16として抽出する抽出部2と、経路領域の外側にあると共に経路領域を囲う矩形領域を外形領域17として特定する特定部4と、外形領域を領域線18で描画した移動体の到達可能範囲7を示す描画データ5aを生成する描画部4とを備えることを特徴としている。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の保持するエネルギーで移動可能な経路を示す道路地図が、複数の矩形領域で区分されており、
前記移動可能な経路を含む矩形領域を経路領域として抽出する抽出部と、
前記経路領域の外側にあると共に前記経路領域を囲う矩形領域を外形領域として特定する特定部と、
前記外形領域を領域線で描画した前記移動体の到達可能範囲を示す描画データを生成する描画部と、
を備える到達可能範囲描画装置。
続きを表示(約 640 文字)
【請求項2】
前記抽出部は、前記矩形領域の対角線の傾きと前記移動可能な経路の傾きの大小に基づいて、前記経路領域を抽出する、請求項1に記載の到達可能範囲描画装置。
【請求項3】
前記特定部は、前記経路領域の外側に隣接する矩形領域の1つを開始領域とし、
所定の優先順位に基づく方向に前記経路領域に隣接する前記矩形領域を1領域ずつ進むのを繰り返して、前記外形領域を特定する、請求項1に記載の到達可能範囲描画装置。
【請求項4】
請求項1に記載の到達可能範囲描画装置から取得した前記描画データを用いて、前記領域線の内部範囲を所定の色で表示すると共に、前記内部範囲のうち水域領域を前記所定の色と異なる色で表示して前記移動体の到達可能範囲を示す表示部を備える表示装置。
【請求項5】
コンピュータに、移動体の到達可能範囲を描画するための描画処理を実行させるプログラムであって、
前記描画処理は、
前記移動体が保持するエネルギーで移動可能な経路を示す道路地図を、複数の矩形領域で区分するステップと、
前記移動可能な経路を含む矩形領域を経路領域として抽出するステップと、
前記経路領域の外側にあると共に前記経路領域を囲う矩形領域を外形領域として特定するステップと、
前記外形領域を領域線で描画した前記移動体の到達可能範囲を示す描画データを生成するステップと、
を含むプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体が保持するエネルギー残量と、移動体が移動に消費するエネルギー量とを考慮して、移動体の到達可能範囲を描画する装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、移動体の残存エネルギー量に基づいて移動体の到達可能範囲を表示する装置がある。
例えば、特許文献1には、画像処理装置が開示されている。その画像処理装置は、地図情報を区分した複数の領域にそれぞれ移動体が到達可能であるか否かを識別する識別部と、識別部による識別結果に基づいて、地図情報から移動体の到達可能範囲の輪郭を抽出する輪郭抽出部と、抽出した輪郭に含まれる頂点群に対し頂点群を増加させる処理を行う補完部と、補完部による処理が行われた輪郭における所定周波数以上の周波数成分を除去する除去部とを備えている。
【先行技術文献】
【特許文献】
【0003】
特許第6047651号
【発明の概要】
【発明が解決しようとする課題】
【0004】
移動体の保持するエネルギーに基づいて表示される到達可能範囲は、搭乗者が判断を誤らないように、高精度に表示するのが好ましい。一方で、高精度に到達可能範囲を表示しようとすると、通常は処理が多くなり、煩雑になる。すなわち、到達可能範囲を高精度に表示し、且つ、到達可能範囲を容易に処理することは、通常は相反する。
【0005】
そこで、一つの側面において、これら相反する事項を同時に満たす到達可能範囲描画装置等を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)到達可能範囲描画装置は、移動体の保持するエネルギーで移動可能な経路を示す道路地図が、複数の矩形領域で区分されており、前記移動可能な経路を含む矩形領域を経路領域として抽出する抽出部と、前記経路領域の外側にあると共に前記経路領域を囲う矩形領域を外形領域として特定する特定部と、前記外形領域を領域線で描画した前記移動体の到達可能範囲を示す描画データを生成する描画部とを備えることを特徴としている。
【0007】
(2)このような到達可能範囲描画装置では、前記抽出部は、前記矩形領域の対角線の傾きと前記移動可能な経路の傾きの大小に基づいて、前記経路領域を抽出するのが好ましい。
【0008】
(3)また前記特定部は、前記経路領域の外側に隣接する矩形領域の1つを開始領域とし、所定の優先順位に基づく方向に前記経路領域に隣接する前記矩形領域を1領域ずつ進むのを繰り返して、前記外形領域を特定するのが好ましい。
【0009】
(4)表示装置は、上述の到達可能範囲描画装置から取得した前記描画データを用いて、前記領域線の内部範囲を所定の色で表示すると共に、前記内部範囲のうち水域領域を前記所定の色と異なる色で表示して前記移動体の到達可能範囲を示す表示部を備えることを特徴としている。
【0010】
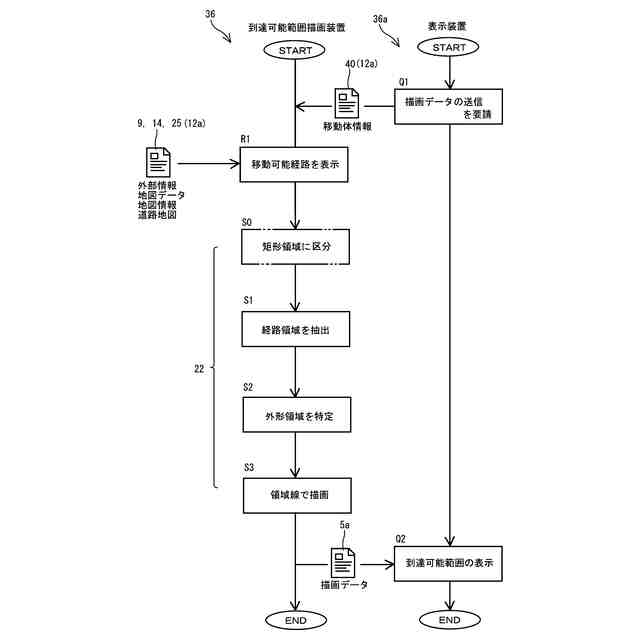
(5)プログラムは、コンピュータに、移動体の到達可能範囲を描画するための描画処理を実行させるものであって、前記描画処理は、前記移動体が保持するエネルギーで移動可能な経路を示す道路地図を、複数の矩形領域で区分するステップと、前記移動可能な経路を含む矩形領域を経路領域として抽出するステップと、前記経路領域の外側にあると共に前記経路領域を囲う矩形領域を外形領域として特定するステップと、前記外形領域を領域線で描画した前記移動体の到達可能範囲を示す描画データを生成するステップとを含むことを特徴としている。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ユニパルス株式会社
力変換器
5日前
株式会社豊田自動織機
産業車両
12日前
横浜ゴム株式会社
音響窓
7日前
日置電機株式会社
測定装置
6日前
株式会社国際電気
試験装置
19日前
個人
センサーを備えた装置
9日前
日本精機株式会社
施工管理システム
9日前
IPU株式会社
距離検出装置
5日前
株式会社東芝
センサ
8日前
株式会社田中設備
報知装置
13日前
株式会社CAST
センサ固定治具
12日前
株式会社熊平製作所
刃物類判別装置
12日前
WOTA株式会社
液位検出システム
19日前
富士電機株式会社
半導体パッケージ
1日前
アズビル株式会社
火炎状態判定装置
6日前
オムロン株式会社
スイッチング装置
19日前
本多電子株式会社
超音波ソナー装置
今日
個人
ヨウ素滴定を用いたアミノ酸の定量方法
16日前
已久工業股ふん有限公司
空気圧縮機構造
8日前
TDK株式会社
磁気検出システム
19日前
トヨタ自動車株式会社
表面傷の検査方法
7日前
トヨタ自動車株式会社
データの補正方法
今日
東ソー株式会社
クロマトグラムの形状判定方法
1日前
愛知時計電機株式会社
超音波流量計
5日前
ミネベアミツミ株式会社
角度センサ
16日前
コニカミノルタ株式会社
光学特性測定装置
12日前
ミネベアミツミ株式会社
角度センサ
16日前
株式会社 ミックウェア
端末装置及びプログラム
14日前
新明和工業株式会社
ダンプカー
12日前
矢崎総業株式会社
導通検査装置
15日前
株式会社東芝
センサ及び電子装置
12日前
オプテックス株式会社
検知装置
15日前
ミネベアミツミ株式会社
ひずみゲージ
6日前
ミネベアミツミ株式会社
ひずみゲージ
12日前
株式会社アイシン
運転支援装置
1日前
株式会社アイシン
運転支援装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ