TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116958
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011517
出願日
2024-01-30
発明の名称
検知装置、検知方法および検知用重心ベクトル提供装置
出願人
セイコーエプソン株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G05B
23/02 20060101AFI20250804BHJP(制御;調整)
要約
【課題】検査対象の運転状態を、簡易な構成で、精度よくスコアとして把握する。
【解決手段】検査対象の動作を反映した時系列データから得られた複数の状態ベクトルをクラスター分割したN個(1≦N)のクラスターそれぞれの重心ベクトルを記憶しておく。重心ベクトルが記憶された後で、検査対象に関して新たに得られた時系列データである検知時時系列データから検知用状態ベクトルを抽出し、検知用状態ベクトルの重心ベクトルからの距離に従って、検査対象の運転状態のスコアを生成する。
【選択図】図1
特許請求の範囲
【請求項1】
検査対象の運転状態を検知する検知装置であって、
前記検査対象の動作を反映した時系列データから得られた複数の状態ベクトルをクラスター分割したN個(1≦N)のクラスターそれぞれの重心ベクトルを記憶した重心ベクトル記憶部と、
前記重心ベクトルが記憶された後で、前記検査対象に関して新たに得られた前記時系列データである検知時時系列データから検知用状態ベクトルを抽出し、前記検知用状態ベクトルの前記重心ベクトルからの距離に従って、前記検査対象の前記運転状態のスコアを生成するスコア生成部と、
を備えた検知装置。
続きを表示(約 1,400 文字)
【請求項2】
前記スコア生成部は、前記検知用状態ベクトルの前記N個の重心ベクトルからの距離のうち最も小さい距離を、前記検査対象の故障スコアとして特定する特定部を備える、請求項1に記載の検知装置。
【請求項3】
前記故障スコアが予め定めた大きさ以上の場合、前記検査対象の故障の可能性に対応した指標を出力する出力部を備える、請求項2に記載の検知装置。
【請求項4】
前記検知装置は、前記検査対象に近接して設けられ、前記検査対象の動作を反映した前記時系列データを直接入力する近接装置内に、前記重心ベクトル記憶部と前記スコア生成部とを備える、請求項1から請求項3のいずれか一項に記載の検知装置。
【請求項5】
前記検知装置は、
前記検査対象に近接して設けられ、前記検知時時系列データを直接入力する近接装置内に、前記スコア生成部を備え、
前記近接装置にネットワークを介して接続され、前記近接装置との間でデータのやり取りが可能なクラウドに、前記重心ベクトル記憶部を備える、
請求項1から請求項3のいずれか一項に記載の検知装置。
【請求項6】
前記検知装置は、
前記検査対象に近接して設けられ、前記検知時時系列データを直接入力する近接装置を備え、
前記近接装置にネットワークを介して接続され、前記近接装置との間でデータのやり取りが可能なクラウドに、前記重心ベクトル記憶部と前記スコア生成部とを備える、
請求項1から請求項3のいずれか一項に記載の検知装置。
【請求項7】
検査対象の運転状態を検知する検知方法であって、
前記検査対象の動作を反映した時系列データから得られた複数の状態ベクトルをクラスター分割したN個(1≦N)のクラスターそれぞれの重心ベクトルを記憶しておき、
前記重心ベクトルが記憶された後で、前記検査対象に関して新たに得られた前記時系列データである検知時時系列データから検知用状態ベクトルを抽出し、前記検知用状態ベクトルの前記重心ベクトルからの距離に従って、前記検査対象の前記運転状態のスコアを生成する、
検知方法。
【請求項8】
検査対象の動作を反映した時系列データを状態ベクトルとして蓄積する蓄積部と、
前記蓄積される複数の状態ベクトルをN個(1≦N)のクラスターにクラスター分割する分割部と、
前記分割されたクラスター毎に求めた重心ベクトルを記憶する重心ベクトル記憶部と、
外部からの求めに応じて、記憶された前記重心ベクトルを、前記検査対象の運転状態を検知するための比較用に提供する提供部と、
を備える検知用重心ベクトル提供装置。
【請求項9】
前記蓄積部は、前記時系列データを入力する多層のリカレントなニューロンネットワークを備え、前記ニューロンネットワークの出力を、前記状態ベクトルとして蓄積する、請求項8に記載の検知用重心ベクトル提供装置。
【請求項10】
前記蓄積部は、ESN(Echo State Network)又はLSM(Liquid State Machine)のアルゴリズムで前記ニューロンネットワークを動作させる、請求項9に記載の検知用重心ベクトル提供装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、検査対象の運転状態を検知する検知技術と運転状態の検知に必要な重心ベクトルを外部に提供する検知用重心ベクトル提供装置等に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
様々な機械やシステムを検査対象として、その運転状態を検知しようとする技術が種々提案されている。例えば、下記特許文献1や2では、検査対象の正常状態の時系列データを予め学習しておき、その後の検査対象から取得した時系列データを予測するモデルを生成し、モデルが予測した時系列データと実際に取得した時系列データの差異から故障スコアを生成し、故障スコアの判定により、検査対象の異常を検知している。こうしたモデルとしては、機械学習モデルあるいはディープラーニングモデルなどが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-9441号公報
特開2023-20770号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、これらの手法では、モデルが予測した時系列データと検査対象からの時系列データとを比較するので、予測モデル自体の予測精度が十分高くないと、故障スコアの精度が十分なものにならない。予測精度を高めるためには、学習する時系列データを十分な大きさにし、あるいは学習のためのニューロンネットワークの層数を十分に大きなものにする必要があり、いずれの場合も学習に要する時間やハードウェア構成が大きなものとなってしまう。しかも、時系列データが多チャンネル(多変量)の場合、予測モデルは原則的にすべてのチャンネルの予測を行う必要があり、学習や推論の演算コストはますます大きくなってしまう。
【課題を解決するための手段】
【0005】
本開示は、以下の形態又は適用例として実現することが可能である。
【0006】
本開示は、検査対象の運転状態を検知する検知装置としての態様でも実施可能である。この検知装置は、前記検査対象の動作を反映した時系列データから得られた複数の状態ベクトルをクラスター分割したN個(1≦N)のクラスターそれぞれの重心ベクトルを記憶した重心ベクトル記憶部と、前記重心ベクトルが記憶された後で、前記検査対象に関して新たに得られた前記時系列データである検知時時系列データから検知用状態ベクトルを抽出し、前記検知用状態ベクトルの前記重心ベクトルからの距離に従って、前記検査対象の前記運転状態のスコアを生成するスコア生成部とを備える。
【0007】
また、本開示は、検査対象の運転状態を検知する検知方法としても実施可能である。この検知方法では、前記検査対象の動作を反映した時系列データから得られた複数の状態ベクトルをクラスター分割したN個(1≦N)のクラスターそれぞれの重心ベクトルを記憶しておき、前記重心ベクトルが記憶された後で、前記検査対象に関して新たに得られた前記時系列データである検知時時系列データから検知用状態ベクトルを抽出し、前記検知用状態ベクトルの前記重心ベクトルからの距離に従って、前記検査対象の前記運転状態のスコアを生成する。
【0008】
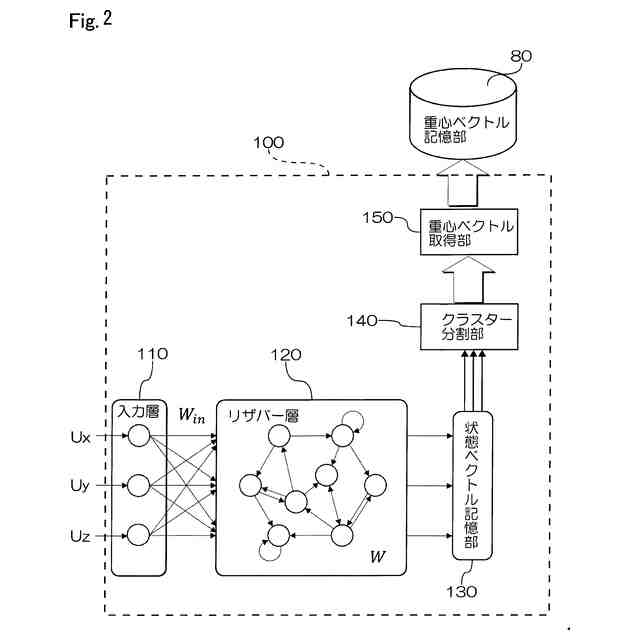
更に、本開示は、検知用重心ベクトル提供装置としても実施可能である。この検知用重心ベクトル提供装置は、検査対象の動作を反映した時系列データを状態ベクトルとして蓄積する蓄積部と、前記蓄積される複数の状態ベクトルをN個(1≦N)のクラスターにクラスター分割する分割部と、前記分割されたクラスター毎に求めた重心ベクトルを記憶する重心ベクトル記憶部と、外部からの求めに応じて、記憶された前記重心ベクトルを、前記検査対象の運転状態を検知するための比較用に提供する提供部とを備える。
【図面の簡単な説明】
【0009】
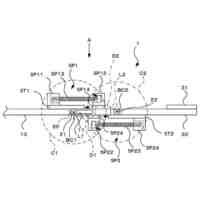
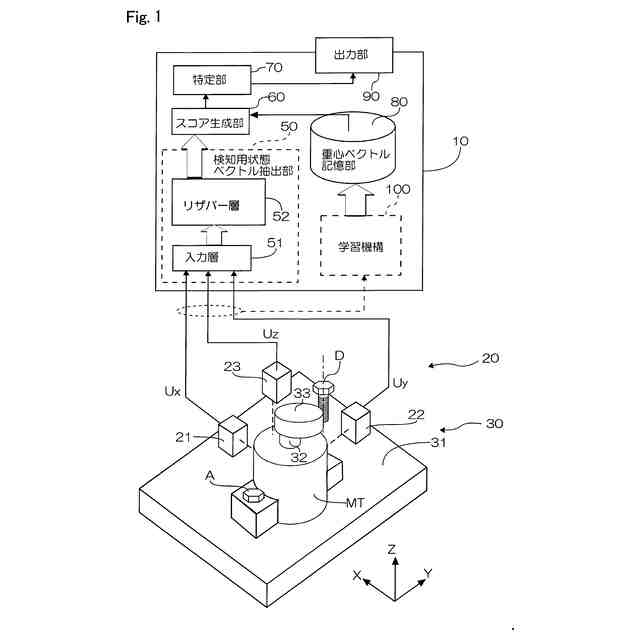
実施形態の異常検出装置の概略構成図。
学習機構の概略構成図。
リザバーの初期化と学習および推論ポイントを示す説明図。
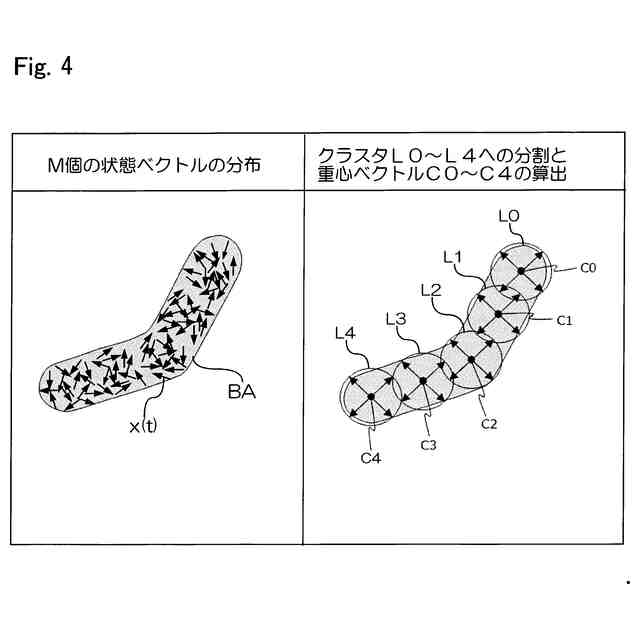
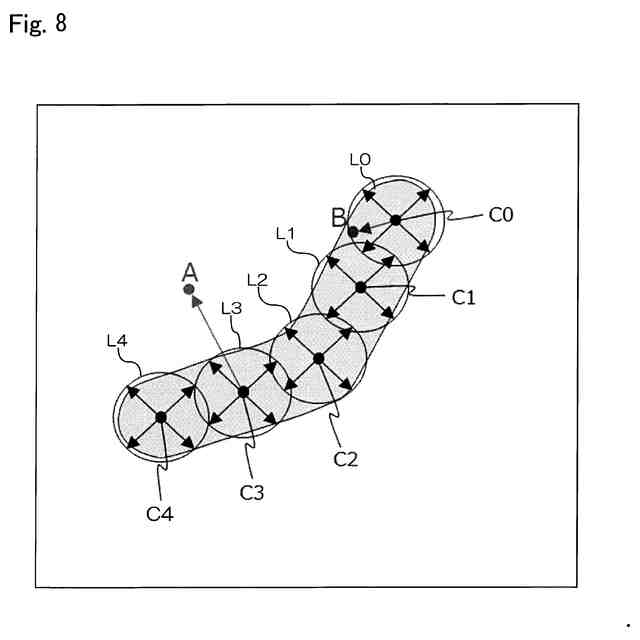
状態ベクトルの分布とクラスタリングの様子を示す説明図。
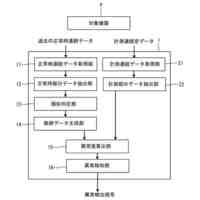
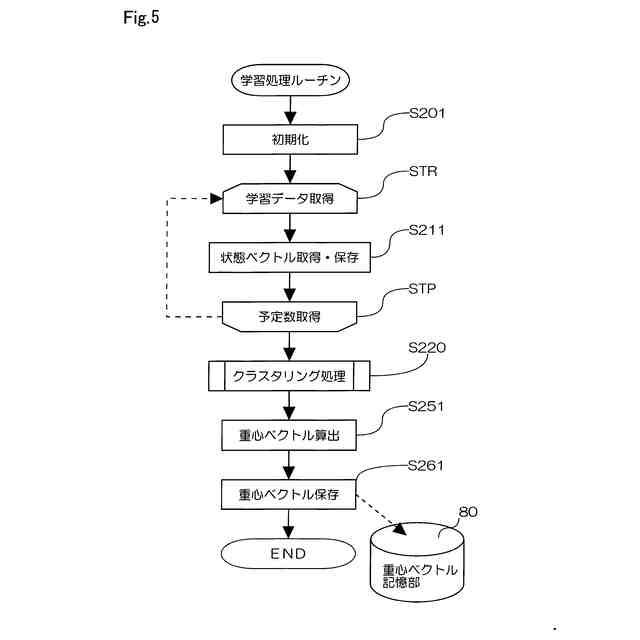
学習処理の一例を示すフローチャート。
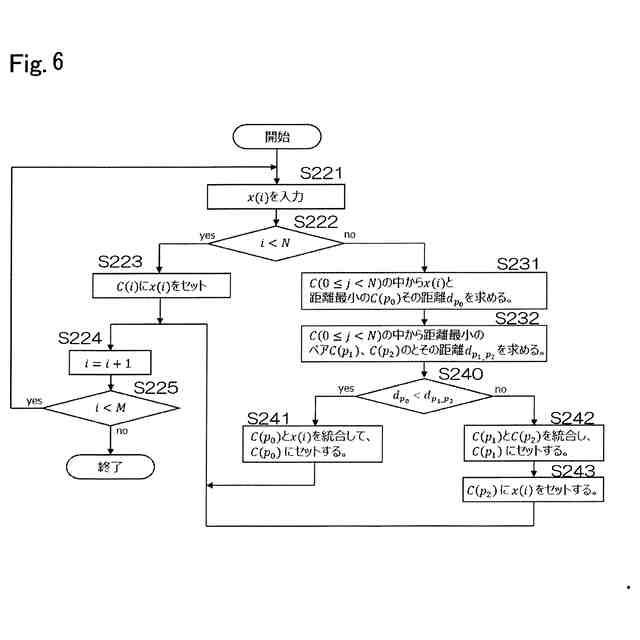
クラスタリングの処理の一例を示すフローチャート。
スコアの生成と故障スコアの特定とを行なう処理を示すフローチャート。
故障スコアの特定の様子を示す説明図。
実施形態における平均故障スコアの一例を示す説明図。
実施形態における平均故障スコアの増加比の一例を示す説明図。
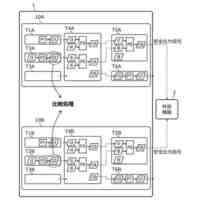
重心ベクトル記憶部のみをクラウド側に備える構成を例示する説明図。
重心ベクトル記憶部およびスコア生成部をクラウド側に備える構成を例示する説明図。
【発明を実施するための形態】
【0010】
A.実施形態:
(A1)ハードウェア構成:
本実施形態の検知装置10のハードウェア構成について説明する。図1は、ローター装置30とその異常を検知する検知装置10とからなる異常検知システム20の概略構成図である。図では、異常検知のための学習を行なう学習機構100を検知装置10と共に示した。学習機構100は、異常検知を行なう前に、異常検知のためのデータを学習するものであり、後述するように、学習結果である重心ベクトルが重心ベクトル記憶部80に記憶された状態であれば、学習機構100それ自体は、ローター装置30の異常を検知するためには必要ないが、説明の都合上、図1に、破線で示した。学習機構100や重心ベクトル記憶部80等の構成上のバリエーションについては、後で詳しく説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
21日前
株式会社豊田自動織機
産業車両
11日前
株式会社FUJI
工作機械
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
愛知製鋼株式会社
車両用システム
5日前
個人
作業車両自動化システム
27日前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
25日前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社ダイフク
搬送設備
1日前
トヨタ自動車株式会社
移動制御システム
21日前
トヨタ自動車株式会社
減圧弁
29日前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社オプトン
制御プログラム生成装置
2か月前
株式会社鷺宮製作所
制御装置
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
マーク ヘイリー
消防ロボット
1か月前
トヨタ自動車株式会社
クラッチペダル
8日前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
6日前
キヤノン電子株式会社
加工システム、及び、加工装置
21日前
キヤノン電子株式会社
加工システム、及び、加工装置
21日前
株式会社テイエルブイ
減圧弁の制御装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
11日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
オムロン株式会社
安全装置
2か月前
三菱電機株式会社
電源回路
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
2か月前
個人
ペダル装置、及びペダル装置を具備する自動車
1か月前
トヨタ自動車株式会社
生産順序計画システム
15日前
株式会社ダイフク
飛行体制御システム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ