TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025119474
公報種別
公開特許公報(A)
公開日
2025-08-14
出願番号
2024014377
出願日
2024-02-01
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250806BHJP(信号)
要約
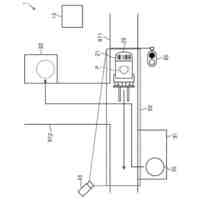
【課題】狭路において対向車両がその前方の移動体を追い越す可能性が高い場合に、当該対向車両と自車両との接触リスクが十分に低減されるように自車両を制御可能な車両制御装置を提供する。
【解決手段】 車両制御装置1は、 自車両が走行している道路が狭路であると判定するための第一条件と、前記所定範囲内に、自車両に接近してくる対向車両、及び、前記対向車両と、自車両との間に低速で移動している移動体が存在すると判定するための第二条件と、自車両が移動体の前端に到達する以前に、前記対向車両が前記移動体の後端に到達する可能性が高いと判定するための第三条件と、前記対向車両と前記移動体との相対的な運動に関する所定の第四条件と、が成立した場合に、前記接触リスク判定条件が緩和される、ように構成される。
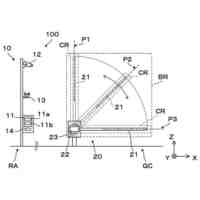
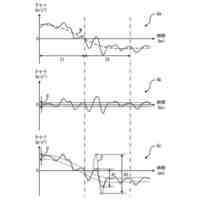
【選択図】 図3
特許請求の範囲
【請求項1】
自車両の進行方向における所定範囲内に存在する物標と自車両との接触リスクが高いと判定するための条件である接触リスク判定条件が成立した場合に、当該接触リスクが低減されるように自車両を制御するリスク低減制御を実行する車両制御装置であって、
自車両が走行している道路が狭路であると判定するための第一条件と、
前記所定範囲内に、自車両に接近してくる対向車両、及び、前記対向車両と、
自車両との間に低速で移動している移動体が存在すると判定するための第二条件と、
自車両が移動体の前端に到達する以前に、前記対向車両が前記移動体の後端に到達する可能性が高いと判定するための第三条件と、
前記対向車両と前記移動体との相対的な運動に関する所定の第四条件と、
が成立した場合に、前記接触リスク判定条件が緩和される、ように構成された、車両制御装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記対向車両と前記移動体との速度差が所定の第一閾値を超え、且つ、前記対向車両の加速度が第二閾値を超えている状況、又は、前記速度差が前記第一閾値以下であり、且つ、前記対向車両の加速度が所定の第三閾値を超えている状況、において、前記第四条件が成立する、ように構成された車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記接触リスク判定条件は、自車両と前記対向車両とが接触するまでの予測時間が第四閾値以下である場合に成立し、
自車両と前記対向車両との相対速度に応じて、前記第四閾値に割り当てられる値が決定され、
前記第一条件乃至前記第四条件のうちの少なくとも1つが不成立である場合であって、且つ前記相対速度が第一速度である場合に、前記第四閾値に第一所定値が割り当てられ、
前記第一条件乃至前記第四条件が成立している場合であって、且つ、前記相対速度が前記第一速度よりも低速の第二速度である場合に、前記第一所定値よりも大きい第二所定値が前記第四閾値に割り当てられる、
ように構成された、車両制御装置。
【請求項4】
請求項1に記載の車両制御装置において、
前記接触リスク判定条件は、自車両と前記対向車両とが接触するまでの予測時間が第四閾値以下である場合に成立し、
自車両が通過すると予測される領域と前記対向車両が通過すると予測され 領域との重なり度合いであるラップ率に応じて、前記第四閾値に割り当てられる値が決定され、
前記第一条件乃至前記第四条件のうちの少なくとも1つが不成立である場合であって、且つ前記ラップ率が第一ラップ率である場合に、前記第四閾値に第一所定値が割り当てられ、
前記第一条件乃至前記第四条件が成立している場合であって、且つ、前記ラップ率が前記第一ラップ率よりも小さい第二ラップ率である場合に、前記第一所定値よりも大きい第二所定値が前記第四閾値に割り当てられる、
ように構成された、車両制御装置。
【請求項5】
請求項1に記載の車両制御装置において、
前記移動体と自車両との距離が所定の第五閾値以下である場合に、自車両の車速が所定の上限値以下に制限される、ように構成された車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の条件が成立した場合に、自車両と物標との接触リスク(両者が接触する確率、又は両者が接触した場合に生じる損害)が低減されるように自車両を制御するリスク低減制御を開始する車両制御装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
自車両及び対向車両が走行している道路の幅が比較的小さい状況下で、自車両と対向車両との接触リスクが高いと判定するための条件が成立した場合に、当該接触リスクが低減されるように自車両を制御するリスク低減制御を開始する車両制御装置が提案されている(例えば、下記特許文献1を参照。)。特許文献1の車両制御装置(以下、「従来装置」と称呼する。)は、リスク低減制御として、自車両の運転者に対して所定の警報が発する報知制御、自車両を制動する制動制御、及び、自車両が対向車両から遠ざかるように自車両を操舵する自動操舵制御を実行可能である。
【先行技術文献】
【特許文献】
【0003】
国際公開第2014/027420号
【発明の概要】
【0004】
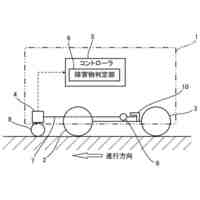
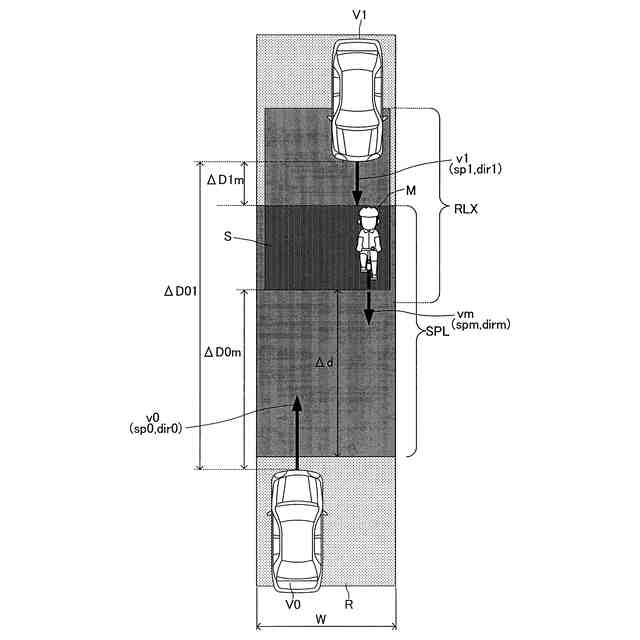
ところで、狭路において、対向車両の前方の区間(対向車両と自車両との間の領域)に低速で移動している移動体が存在している状況下で、対向車両が当該移動体を追い越すシーンが想定される。このシーンでは、自車両及び対向車両が走行している道路の幅が比較的小さいため、対向車両が移動体を追い越す際に、自車両の前方領域へ大きく入り込む可能性が高い。この場合、自車両を操舵して当該対向車両を回避することは困難である可能性が高い。そのため、狭路では、対向車両が移動体を追い越すシーンにおいて、できるだけ早期(例えば、対向車両が移動体を追い越し始める以前)に、自車両の制動が開始されることが好ましい。
【0005】
ここで、従来装置において、リスク低減制御の開始条件は、自車両と対向車両との距離を相対速度で除して得られた時間が閾値以下である場合に成立するように構成されている。すなわち、リスク低減制御の開始条件は、対向車両や移動体の挙動とは無関係である。すなわち、従来装置は、狭路において、対向車両が移動体を追い越す可能性の高さに応じて、リスク低減制御の開始タイミングを調整することができない。そのため、対向車両が移動体を追い越し始めた後に開始条件が成立する場合がある。この場合、リスク低減制御が実行されることにより得られる効果(自車両と対向車両との接触リスクの低減効果)が僅かである虞がある。
【0006】
本発明の目的の1つは、狭路において対向車両がその前方の移動体を追い越す可能性が高い場合に、当該対向車両と自車両との接触リスクが十分に低減されるように自車両を制御可能な車両制御装置を提供することにある。
【0007】
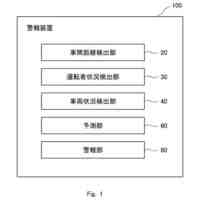
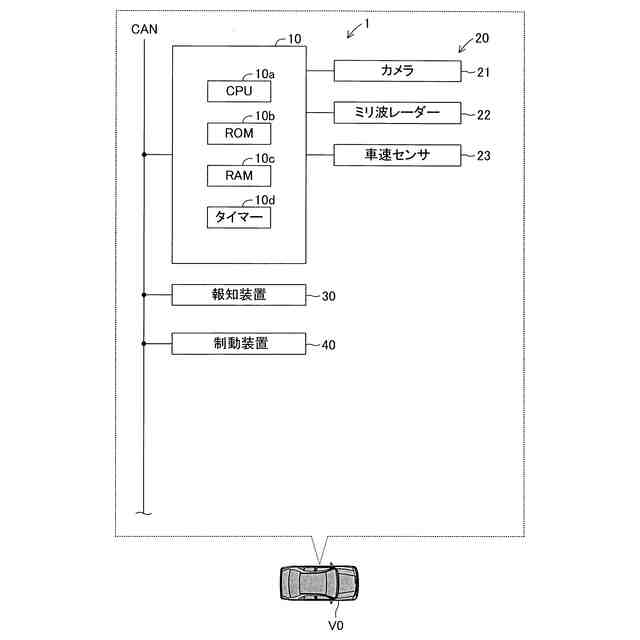
上記課題を解決するために、本発明の車両制御装置(1)は、
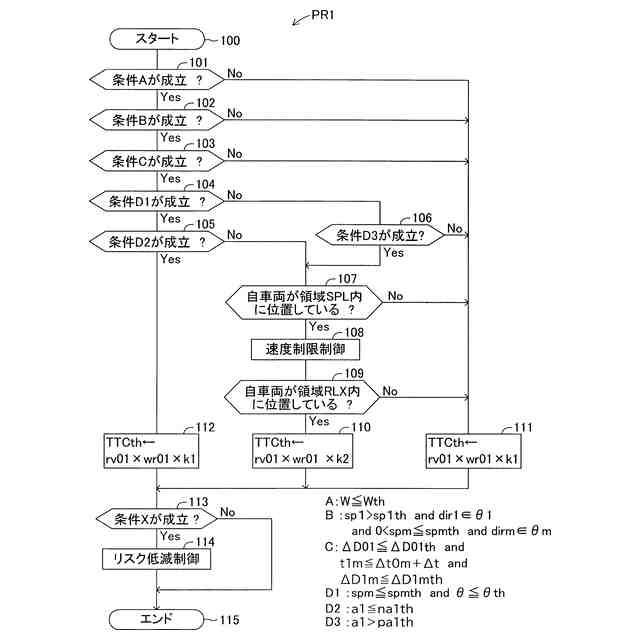
自車両の進行方向における所定範囲内に存在する物標と自車両との接触リスクが高いと判定するための条件である接触リスク判定条件が成立した場合に、当該接触リスクが低減されるように自車両を制御するリスク低減制御を実行する。車両制御装置は、自車両が走行している道路が狭路であると判定するための第一条件と、前記所定範囲内に、自車両に接近してくる対向車両、及び、前記対向車両と自車両との間に低速で移動している移動体が存在すると判定するための第二条件と、自車両が移動体の前端に到達する以前に、前記対向車両が前記移動体の後端に到達する可能性が高いと判定するための第三条件と、前記対向車両と前記移動体との相対的な運動に関する所定の第四条件と、が成立した場合に、前記接触リスク判定条件が緩和される、ように構成される。
【0008】
本発明の一態様に係る車両制御装置において、前記対向車両と前記移動体との速度差が所定の第一閾値を超え、且つ、前記対向車両の加速度が第二閾値を超えている状況、又は、前記速度差が前記第一閾値以下であり、且つ、前記対向車両の加速度が所定の第三閾値を超えている状況、において、前記第四条件が成立する。
【0009】
本発明の他の態様に記載の車両制御装置において、前記接触リスク判定条件は、自車両と前記対向車両とが接触するまでの予測時間が第四閾値以下である場合に成立し、自車両と前記対向車両との相対速度に応じて、前記第四閾値に割り当てられる値が決定され、前記第一条件乃至前記第四条件のうちの少なくとも1つが不成立である場合であって、且つ前記相対速度が第一速度である場合に、前記第四閾値に第一所定値が割り当てられ、前記第一条件乃至前記第四条件が成立している場合であって、且つ、前記相対速度が前記第一速度よりも低速の第二速度である場合に、前記第一所定値よりも大きい第二所定値が前記第四閾値に割り当てられる。
【0010】
本発明の他の態様に係る車両制御装置において、前記接触リスク判定条件は、自車両と前記対向車両とが接触するまでの予測時間が第四閾値以下である場合に成立し、 自車両が通過すると予測される領域と前記対向車両が通過すると予測され 領域との重なり度合いであるラップ率に応じて、前記第四閾値に割り当てられる値が決定され、前記第一条件乃至前記第四条件のうちの少なくとも1つが不成立である場合であって、且つ前記ラップ率が第一ラップ率である場合に、前記第四閾値に第一所定値が割り当てられ、前記第一条件乃至前記第四条件が成立している場合であって、且つ、前記ラップ率が前記第一ラップ率よりも小さい第二ラップ率である場合に、前記第一所定値よりも大きい第二所定値が前記第四閾値に割り当てられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
路面投影装置
1か月前
ニッタン株式会社
発信機
3か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
11日前
個人
防犯に特化したアプリケーション
1か月前
ニッタン株式会社
発信機
13日前
ニッタン株式会社
発信機
3か月前
ニッタン株式会社
発信機
1か月前
東京都公立大学法人
液滴検出装置
1か月前
トヨタ自動車株式会社
車両
12日前
TOA株式会社
拡声放送システム
1か月前
株式会社アジラ
データ転送システム
1か月前
日本信号株式会社
情報提供システム
1か月前
アズビル株式会社
建物管理システム
2か月前
個人
乗り物の移動を支援する方法及び装置
1か月前
日本信号株式会社
信号情報システム
1か月前
株式会社JVCケンウッド
警報装置
1か月前
ホーチキ株式会社
異常報知設備
3か月前
ホーチキ株式会社
異常報知設備
2か月前
日本信号株式会社
交通信号制御システム
1か月前
個人
現示内容に関する情報放送機能付き信号機
21日前
トヨタ自動車株式会社
回避動作判別装置
1か月前
株式会社JVCケンウッド
情報処理装置
2か月前
株式会社豊田自動織機
制御システム
1か月前
株式会社フィットネスワン
見守りシステム
3か月前
本田技研工業株式会社
運転評価装置
18日前
ホーチキ株式会社
火災検出システム
1か月前
本田技研工業株式会社
情報提供装置
12日前
本田技研工業株式会社
情報提供装置
12日前
ホーチキ株式会社
非常通報システム
3か月前
トヨタ自動車株式会社
配車システム
3か月前
トヨタ自動車株式会社
障害物検知装置
2か月前
ユニティガードシステム株式会社
警備監視システム
2か月前
本田技研工業株式会社
保険料算出装置
18日前
Adora株式会社
アプリ使用制御システム
2か月前
トヨタ自動車株式会社
方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ