TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025119522
公報種別
公開特許公報(A)
公開日
2025-08-14
出願番号
2024014463
出願日
2024-02-01
発明の名称
モデル予測制御装置、モデル予測制御システム、モデル予測制御方法、及びプログラム
出願人
月島JFEアクアソリューション株式会社
,
国立大学法人室蘭工業大学
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05B
13/02 20060101AFI20250806BHJP(制御;調整)
要約
【課題】ブラックボックス化された制御対象モデルを用いてモデル予測制御による制御対象の最適化をする。
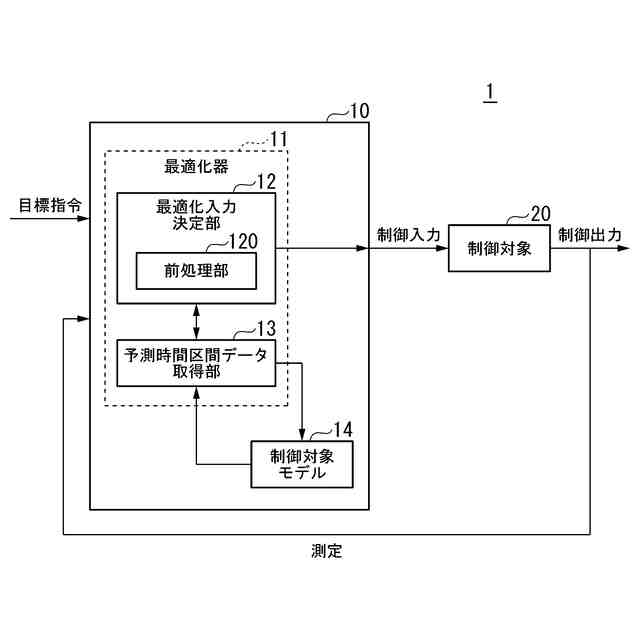
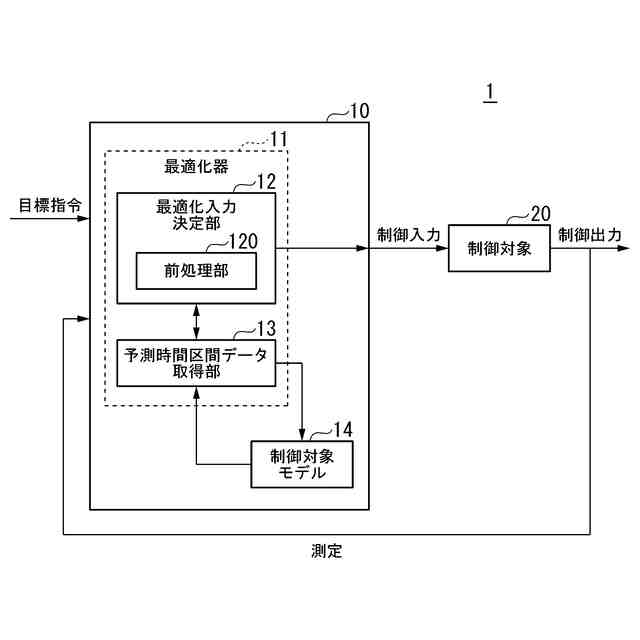
【解決手段】ブラックボックス化された制御対象モデルと、第1時間を始点として予測時間区間に渡る複数の制御入力データの時系列変化を示す制御入力データ群と、前記制御入力データ群に対応する複数の制御出力データの時系列変化を示す制御出力データ群を取得する予測時間区間データ取得部と、前記予測時間区間データ取得部により取得された制御出力データ群と前記制御対象における状態の目標値との乖離度合いに基づいて、前記制御対象の状態を目標値に近づける前記制御入力データ群である優良制御入力データ群を生成し、生成した前記優良制御入力データ群から前記制御対象の状態を最適化する制御入力データである最適値を決定する最適化入力決定部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
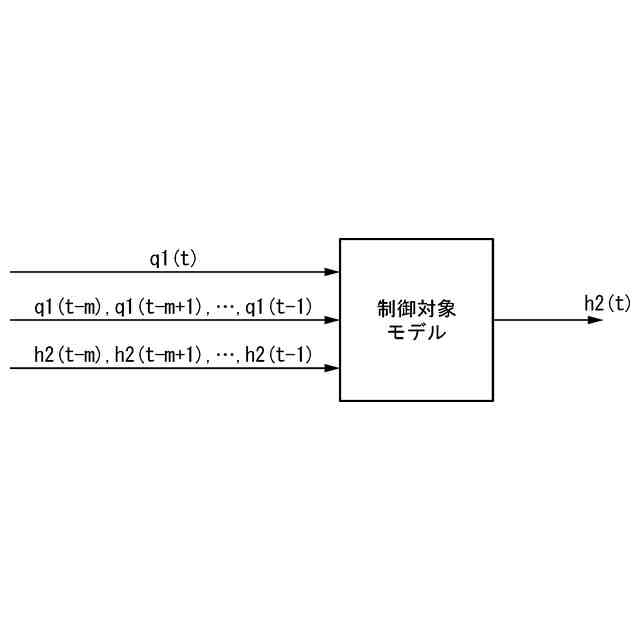
制御対象がモデル化された制御対象モデルであり、第1時間に制御対象に入力する制御入力データと、前記第1時間より前の前記制御対象の状態を示す制御出力データの時系列データおよび前記第1時間より前の前記制御対象に入力した制御入力データの時系列データに基づいて、前記第1時間における前記制御対象の状態を予測し、モデル内部の構成がブラックボックス化された制御対象モデルと、
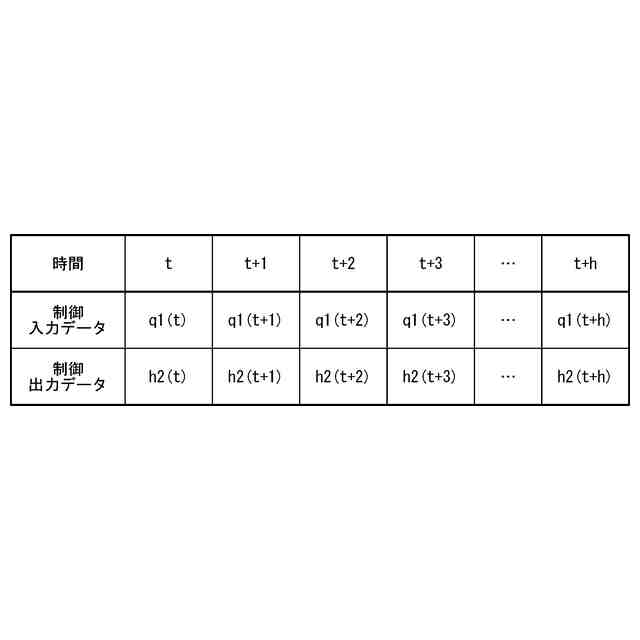
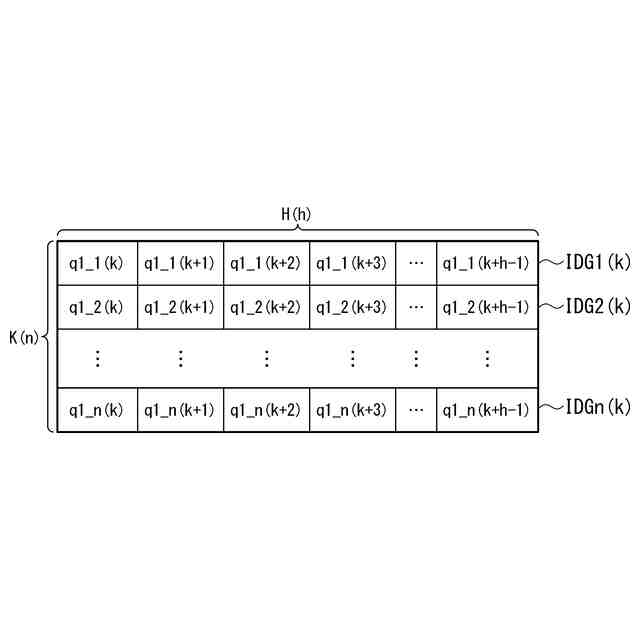
前記制御対象モデルに制御入力データを入力して前記制御対象モデルから出力される制御出力データを取得する予測処理を繰り返すことによって、前記第1時間を始点として予測時間区間に渡る複数の制御入力データの時系列変化を示す制御入力データ群と、前記制御入力データ群に対応する複数の制御出力データの時系列変化を示す制御出力データ群を取得する予測時間区間データ取得部と、
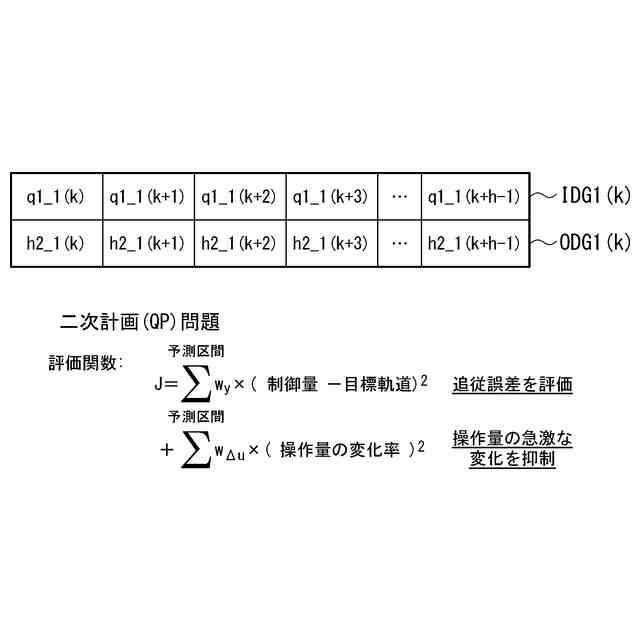
前記予測時間区間データ取得部により取得された制御出力データ群と前記制御対象における状態の目標値との乖離度合いに基づいて、前記制御対象の状態を目標値に近づける前記制御入力データ群である優良制御入力データ群を生成し、生成した前記優良制御入力データ群から前記制御対象の状態を最適化する制御入力データである最適値を決定する最適化入力決定部と、
を備えるモデル予測制御装置。
続きを表示(約 1,600 文字)
【請求項2】
大域的最適化アルゴリズムによる探索の初期値を決定する前処理部をさらに備え、
前記最適化入力決定部は、
前記初期値に大域的最適化アルゴリズムを適用することによって前記最適値を決定し、
前記前処理部は、
前記制御対象に入力する値として取り得る範囲に含まれるデータから、前記初期値の候補である候補データを選択し、選択した候補データを制御入力データとして用いることによって、互いに異なる制御入力データの組合せからなる複数の前記制御入力データ群に対応する前記制御出力データ群の各々を、前記予測時間区間データ取得部を用いて取得し、
前記制御出力データ群の各々に評価関数を適用することによって前記制御出力データ群の各々に対する評価値を算出し、
前記制御出力データ群の各々に対する評価値に基づいて選択した前記優良制御入力データ群を、前記制御対象に前記第1時間に入力する前記最適値を探索するための前記初期値とする、
請求項1に記載のモデル予測制御装置。
【請求項3】
前記前処理部は、大域的最適化アルゴリズムとして差分進化法を用いる、
請求項2に記載のモデル予測制御装置。
【請求項4】
前記前処理部は、前記制御対象に対する入力と出力との対応関係を学習することによって、前記制御対象の状態に基づき前記制御対象に入力する制御入力データを予測する学習済モデルを用いて、前記候補データを決定する、
請求項2に記載のモデル予測制御装置。
【請求項5】
前記前処理部は、前記制御対象に対する入力と出力との対応関係を数式により表現したPID制御のモデルを用いて前記候補データを決定する、
請求項2に記載のモデル予測制御装置。
【請求項6】
前記前処理部は、
前記第1時間を始点とする前記優良制御入力データ群に含まれる制御入力データのうち前記第1時間より後の第2時間以降の制御入力データを、前記第2時間を始点とする前記制御入力データ群である第2制御入力データ群の制御入力データに再利用し、
前記第2制御入力データ群に含まれる制御入力データのうち、前記第1時間を始点とする前記優良制御入力データ群から再利用しない制御入力データを、新規制御入力データとして生成し、生成した前記新規制御入力データに対応する制御出力データを、前記予測時間区間データ取得部を用いて取得することによって、前記第2制御入力データ群に対応する前記制御出力データ群を取得する、
請求項2に記載のモデル予測制御装置。
【請求項7】
前記前処理部は、
前記新規制御入力データを、前記制御対象に入力する値を表現するための特徴量空間からランダムに選択する、
請求項6に記載のモデル予測制御装置。
【請求項8】
前記前処理部は、
前記新規制御入力データを、前記制御対象に対する入力と出力との対応関係を学習することによって、前記制御対象の状態に基づいて前記制御対象に入力した制御入力データを予測する学習済モデルを用いて生成する、
請求項6に記載のモデル予測制御装置。
【請求項9】
前記前処理部は、
前記新規制御入力データを、前記制御対象に対する入力と出力との対応関係を数式により表現したPID制御のモデルを用いて生成する、
請求項6に記載のモデル予測制御装置。
【請求項10】
請求項1に記載のモデル予測制御装置と、
前記モデル予測制御装置が制御する前記制御対象を含む制御装置と、
備えるモデル予測制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モデル予測制御装置、モデル予測制御システム、モデル予測制御方法、及びプログラムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
制御対象の状態(例えば、温度など)を所望の状態(最適な状態)にする制御手法として、PID制御などのフィードバック制御が行われている。
ここで、汚泥焼却設備の温度制御など、制御対象に対する制御入力が制御対象の状態に反映されるまでの反応時間が比較的長い時間を要する制御対象については、PID制御による制御が難しいという課題がある。
この対策として、制御対象を数値モデル化した制御対象モデルを用いて制御対象における未来の挙動を予測することによって制御対象を制御するモデル予測制御(MPC、Model Predictive Control)が提案されている。
図14には従来の一般的なMPC(符号A)の構成例が示されている。この図の例に示すように、従来の一般的なMPCは最適化器(符号B)と予測器(符号C)とを備える。予測器は、制御対象(符号D)を数値モデル化した数値モデルである。予測器は、制御対象における現在に至るまでの過去の状態と制御対象に対する制御入力に基づき、制御対象における未来の挙動を予測する。最適化器は、予測器による予測結果に基づき制御対象の状態が最適になる制御入力を決定する。最適化器は、未来の状態が所望の状態となっている度合いを評価する評価関数を作成し、評価関数を最小化する制御入力を、制御対象が所望の状態となる最適な制御入力として決定する。
また、近年のディープラーニングを含む機械学習の急速な発展により、制御対象をモデル化する手法に機械学習モデルを適用する試みが行われている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-068029号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、機械学習モデルは、入力に対する出力が行われるが、内部の構成がブラックボックス化されモデルによる予測処理の過程が数式で表現されていないことが多い。MPCでは、制御対象が数式により表現された制御対象モデルを用いて作成した評価関数を最適化することを前提としている。このため、MPCに、機械学習モデルのようなブラックボックス化された制御対象モデルを用いると評価関数を最適化することが困難となり、制御対象の状態を最適化することが難しいという問題があった。
【0005】
上述の課題を鑑み、本発明の目的は、ブラックボックス化された制御対象モデルを用いてモデル予測制御による制御対象の最適化をすることができるモデル予測制御装置、モデル予測制御システム、モデル予測制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
上述の課題を解決するために、本発明の一態様は、制御対象がモデル化された制御対象モデルであり、第1時間に制御対象に入力する制御入力データと、前記第1時間より前の前記制御対象の状態を示す制御出力データの時系列データおよび前記第1時間より前の前記制御対象に入力した制御入力データの時系列データに基づいて、前記第1時間における前記制御対象の状態を予測し、モデル内部の構成がブラックボックス化された制御対象モデルと、前記制御対象モデルに制御入力データを入力して前記制御対象モデルから出力される制御出力データを取得する予測処理を繰り返すことによって、前記第1時間を始点として予測時間区間に渡る複数の制御入力データの時系列変化を示す制御入力データ群と、前記制御入力データ群に対応する複数の制御出力データの時系列変化を示す制御出力データ群を取得する予測時間区間データ取得部と、前記予測時間区間データ取得部により取得された制御出力データ群と前記制御対象における状態の目標値との乖離度合いに基づいて、前記制御対象の状態を目標値に近づける前記制御入力データ群である優良制御入力データ群を生成し、生成した前記優良制御入力データ群から前記制御対象の状態を最適化する制御入力データである最適値を決定する最適化入力決定部と、を備えるモデル予測制御装置である。
【0007】
本発明の一態様は、上記に記載のモデル予測制御装置と、前記モデル予測制御装置が制御する前記制御対象を含む制御装置と、備えるモデル予測制御システムである。
【0008】
本発明の一態様は、制御対象がモデル化された制御対象モデルであり、第1時間に制御対象に入力する制御入力データと、前記第1時間より前の前記制御対象の状態を示す制御出力データの時系列データおよび前記第1時間より前の前記制御対象に入力した制御入力データの時系列データに基づいて、前記第1時間における前記制御対象の状態を予測し、モデル内部の構成がブラックボックス化された制御対象モデルを備えるコンピュータであるモデル予測制御装置が行うモデル予測制御方法であって、予測時間区間データ取得部が、前記制御対象モデルに制御入力データを入力して前記制御対象モデルから出力される制御出力データを取得する予測処理を繰り返すことによって、前記第1時間を始点として予測時間区間に渡る複数の制御入力データの時系列変化を示す制御入力データ群と、前記制御入力データ群に対応する複数の制御出力データの時系列変化を示す制御出力データ群を取得し、最適化入力決定部が、前記予測時間区間データ取得部により取得された制御出力データ群と前記制御対象における状態の目標値との乖離度合いに基づいて、前記制御対象の状態を目標値に近づける前記制御入力データ群である優良制御入力データ群を生成し、生成した前記優良制御入力データ群から前記制御対象の状態を最適化する制御入力データである最適値を決定する、モデル予測制御方法である。
【0009】
本発明の一態様は、制御対象がモデル化された制御対象モデルであり、第1時間に制御対象に入力する制御入力データと、前記第1時間より前の前記制御対象の状態を示す制御出力データの時系列データおよび前記第1時間より前の前記制御対象に入力した制御入力データの時系列データに基づいて、前記第1時間における前記制御対象の状態を予測し、モデル内部の構成がブラックボックス化された制御対象モデルを備えるコンピュータであるモデル予測制御装置に、前記制御対象モデルに制御入力データを入力して前記制御対象モデルから出力される制御出力データを取得する予測処理を繰り返すことによって、前記第1時間を始点として予測時間区間に渡る複数の制御入力データの時系列変化を示す制御入力データ群と、前記制御入力データ群に対応する複数の制御出力データの時系列変化を示す制御出力データ群を取得させ、前記取得された制御出力データ群と前記制御対象における状態の目標値との乖離度合いに基づいて、前記制御対象の状態を目標値に近づける前記制御入力データ群である優良制御入力データ群を生成し、生成した前記優良制御入力データ群から前記制御対象の状態を最適化する制御入力データである最適値を決定させる、プログラムである。
【発明の効果】
【0010】
本発明によれば、ブラックボックス化された制御対象モデルを用いてモデル予測制御による制御対象の最適化をすることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
20日前
株式会社豊田自動織機
産業車両
10日前
株式会社FUJI
工作機械
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
愛知製鋼株式会社
車両用システム
4日前
個人
作業車両自動化システム
26日前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
ローム株式会社
半導体集積回路
2か月前
トヨタ自動車株式会社
移動制御システム
20日前
株式会社ダイフク
搬送設備
24日前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
今日
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
ペダル機構
3か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社オプトン
制御プログラム生成装置
2か月前
トヨタ自動車株式会社
減圧弁
28日前
株式会社鷺宮製作所
制御装置
2か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
クラッチペダル
7日前
マーク ヘイリー
消防ロボット
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
2か月前
株式会社テイエルブイ
減圧弁の制御装置
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
20日前
キヤノン電子株式会社
加工システム、及び、加工装置
20日前
愛知製鋼株式会社
マーカシステム及び制御方法
5日前
ルネサスエレクトロニクス株式会社
半導体装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ