TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122902
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018639
出願日
2024-02-09
発明の名称
モータ装置、およびモータ制御方法
出願人
日本精工株式会社
代理人
弁理士法人栄光事務所
主分類
H02P
29/40 20160101AFI20250815BHJP(電力の発電,変換,配電)
要約
【課題】モータ制御に用いる信号に含まれるノイズの影響を抑制し、より精度の高いモータ制御を実現する。
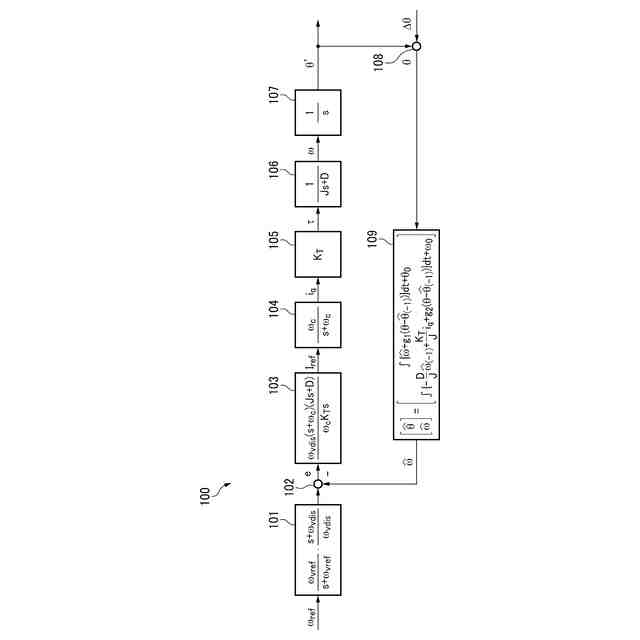
【解決手段】モータ制御装置は、モータから検出された角速度情報に基づき、フィードバック制御により前記モータの角速度推定値を導出する状態推定器と、速度指令値に基づいて、前記モータに対する角速度指令値を算出する第1の速度制御器と、前記第1の速度制御器にて算出された角速度指令値と、前記状態推定器により推定された角速度推定値とを用いて、前記モータに対する電流指令値を算出する第2の速度制御器と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
モータから検出された角速度情報に基づき、フィードバック制御により前記モータの角速度推定値を導出する状態推定器と、
速度指令値に基づいて、前記モータに対する角速度指令値を算出する第1の速度制御器と、
前記第1の速度制御器にて算出された角速度指令値と、前記状態推定器により推定された角速度推定値とを用いて、前記モータに対する電流指令値を算出する第2の速度制御器と、
を有するモータ制御装置。
続きを表示(約 1,800 文字)
【請求項2】
速度指令値に基づいて、モータに対する角速度指令値を算出する第1の速度制御器と、
前記モータの出力における角度誤差に基づく値を用いて、前記モータの角速度推定値を導出する状態推定器と、
前記第1の速度制御器にて算出された角速度指令値と、前記状態推定器により推定された角速度推定値との差分を用いて、前記モータに対する電流指令値を算出する第2の速度制御器と、
を有し、
前記第1の速度制御器と前記第2の速度制御器と前記状態推定器を含んで構成される閉ループ系の第1の伝達関数は、1次のローパスフィルタの特性を有し、
前記第1の伝達関数は、
角速度の周波数領域に対して、調整可能な第1の閾値が設定され、
前記第1の閾値よりも大きい領域について、前記速度指令値に対するゲインを減少するように規定され、
前記第2の速度制御器と前記状態推定器を含んで構成される閉ループ系の第2の伝達関数は、1次のローパスフィルタとバンドパスフィルタの特性を有し、
前記第2の伝達関数は、
角速度の周波数領域に対して、調整可能な第2の閾値が設定され、
前記第2の閾値をピークとして、前記角度誤差に基づく入力値に対するゲインを減少するように規定される、モータ制御装置。
【請求項3】
前記第2の伝達関数は更に、
角速度の周波数領域に対して、前記第2の閾値よりも大きい、調整可能な第3の閾値が設定され、
前記第3の閾値よりも大きい領域は、前記第2の閾値と前記第3の閾値の間の領域よりも前記速度指令値に対するゲインを減少するように規定される、請求項2に記載のモータ制御装置。
【請求項4】
前記第2の閾値よりも小さい領域のゲインと、前記第2の閾値から前記第3の閾値の間の領域のゲインは、前記第2の閾値をピークとして同じ割合にて減少するように規定される、請求項3に記載のモータ制御装置。
【請求項5】
前記第1の閾値は、前記速度指令値に基づいて設定される、請求項2に記載のモータ制御装置。
【請求項6】
前記速度指令値による前記モータの回転数が低くなるに従って、前記第2の閾値は高くなるように設定される、請求項2に記載のモータ制御装置。
【請求項7】
前記速度指令値による前記モータの回転数が低くなるに従って、前記第3の閾値は高くなるように設定される、請求項3に記載のモータ制御装置。
【請求項8】
モータから検出された角速度情報に基づき、フィードバック制御により前記モータの角速度推定値を導出する推定工程と、
速度指令値に基づいて、前記モータに対する角速度指令値を算出する第1の算出工程と、
前記第1の算出工程にて算出された角速度指令値と、前記推定工程により推定された角速度推定値とを用いて、前記モータに対する電流指令値を算出する第2の算出工程と、
を有するモータ制御方法。
【請求項9】
第1の速度制御器において、速度指令値に基づいて、モータに対する角速度指令値を算出する第1の算出工程と、
状態推定器において、前記モータの出力における角度誤差に基づく値を用いて、前記モータの角速度推定値を導出する推定工程と、
第2の速度制御器において、前記第1の算出工程にて算出された角速度指令値と、前記推定工程にて推定された角速度推定値との差分を用いて、前記モータに対する電流指令値を算出する第2の算出工程と、
を有し、
前記第1の速度制御器と前記第2の速度制御器と前記状態推定器を含んで構成される閉ループ系の第1の伝達関数は、1次のローパスフィルタの特性を有し、
前記第1の伝達関数は、
角速度の周波数領域に対して、調整可能な第1の閾値が設定され、
前記第1の閾値よりも大きい領域について、前記速度指令値に対するゲインを減少するように規定され、
前記第2の速度制御器と前記状態推定器を含んで構成される閉ループ系の第2の伝達関数は、1次のローパスフィルタとバンドパスフィルタの特性を有し、
前記第2の伝達関数は、
角速度の周波数領域に対して、調整可能な第2の閾値が設定され、
前記第2の閾値をピークとして、前記角度誤差に基づく入力値に対するゲインを減少するように規定される、モータ制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ装置、およびモータ制御方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、工作機械や検査装置などの様々な装置において、モータが利用されている。モータの回転速度は、速度指令通りに追従させることが求められる。実際には、モータに対する速度指令や、モータの動作状態を検出する検出装置による検出信号には誤差やノイズが含まれ得る。これらは、モータの動作時における角度や角速度に影響を与え得る。
【0003】
このようなノイズ等による影響を考慮した様々なモータ構成が開示されている。例えば、特許文献1では、モータの回転角をエンコーダで検出し、その検出角度に含まれる誤差を演算して、角度誤差分を補正した後に位置・速度制御機に入力するフィードフォワード型の構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-046709号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
速度指令通りに回転速度を追従させ、精度良くモータを制御する場合、上記のような誤差やノイズの影響を抑制することが求められる。ここで、フィードバック型の構成について考える。上述したような誤差には、例えば、角度検出の際に、モータの1回転に対応した周期性のある正弦波誤差(リニアリティ誤差)が複数含まれている。このような誤差を考慮せずに角度信号を微分した角速度信号をフィードバックして速度制御を行った場合、回転速度に比例した周波数の音・振動が発生してしまう。また、そのほかの誤差やノイズとして、モータを制御するための速度指令には高周波のノイズが含まれる場合がある。このようなノイズが含まれた速度指令をそのまま用いて回転速度の制御を行った場合には、高周波の音・振動が発生してしまう。また、例えば、特許文献1の構成では、誤差パターンを演算するための条件として、モータが等速運動中でなければチューニングができないという課題がある。上記のようなモータ制御に用いる様々な信号に含まれる誤差やノイズの影響を抑制して、回転速度を指令通りに追従させることにより、より精度の高い回転制御を実現することが求められている。
【0006】
上記課題を鑑み、本発明は、モータ制御に用いる信号に含まれるノイズの影響を抑制し、より精度の高いモータ制御を実現することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために本発明は以下の構成を有する。すなわち、モータ制御装置は、
モータから検出された角速度情報に基づき、フィードバック制御により前記モータの角速度推定値を導出する状態推定器と、
速度指令値に基づいて、前記モータに対する角速度指令値を算出する第1の速度制御器と、
前記第1の速度制御器にて算出された角速度指令値と、前記状態推定器により推定された角速度推定値とを用いて、前記モータに対する電流指令値を算出する第2の速度制御器と、
を有する。
【0008】
また、本発明の別の形態は以下の構成を有する。すなわち、モータ制御装置は、
速度指令値に基づいて、モータに対する角速度指令値を算出する第1の速度制御器と、
前記モータの出力における角度誤差に基づく値を用いて、前記モータの角速度推定値を導出する状態推定器と、
前記第1の速度制御器にて算出された角速度指令値と、前記状態推定器により推定された角速度推定値との差分を用いて、前記モータに対する電流指令値を算出する第2の速度制御器と、
を有し、
前記第1の速度制御器と前記第2の速度制御器と前記状態推定器を含んで構成される閉ループ系の第1の伝達関数は、1次のローパスフィルタの特性を有し、
前記第1の伝達関数は、
角速度の周波数領域に対して、調整可能な第1の閾値が設定され、
前記第1の閾値よりも大きい領域について、前記速度指令値に対するゲインを減少するように規定され、
前記第2の速度制御器と前記状態推定器を含んで構成される閉ループ系の第2の伝達関数は、1次のローパスフィルタとバンドパスフィルタの特性を有し、
前記第2の伝達関数は、
角速度の周波数領域に対して、調整可能な第2の閾値が設定され、
前記第2の閾値をピークとして、前記角度誤差に基づく入力値に対するゲインを減少するように規定される。
【0009】
また、本発明の別の形態は以下の構成を有する。すなわち、モータ制御方法は、
モータから検出された角速度情報に基づき、フィードバック制御により前記モータの角速度推定値を導出する推定工程と、
速度指令値に基づいて、前記モータに対する角速度指令値を算出する第1の算出工程と、
前記第1の算出工程にて算出された角速度指令値と、前記推定工程により推定された角速度推定値とを用いて、前記モータに対する電流指令値を算出する第2の算出工程と、
を有する。
【0010】
また、本発明の別の形態は以下の構成を有する。すなわち、モータ制御方法は、
第1の速度制御器において、速度指令値に基づいて、モータに対する角速度指令値を算出する第1の算出工程と、
状態推定器において、前記モータの出力における角度誤差に基づく値を用いて、前記モータの角速度推定値を導出する推定工程と、
第2の速度制御器において、前記第1の算出工程にて算出された角速度指令値と、前記推定工程にて推定された角速度推定値との差分を用いて、前記モータに対する電流指令値を算出する第2の算出工程と、
を有し、
前記第1の速度制御器と前記第2の速度制御器と前記状態推定器を含んで構成される閉ループ系の第1の伝達関数は、1次のローパスフィルタの特性を有し、
前記第1の伝達関数は、
角速度の周波数領域に対して、調整可能な第1の閾値が設定され、
前記第1の閾値よりも大きい領域について、前記速度指令値に対するゲインを減少するように規定され、
前記第2の速度制御器と前記状態推定器を含んで構成される閉ループ系の第2の伝達関数は、1次のローパスフィルタとバンドパスフィルタの特性を有し、
前記第2の伝達関数は、
角速度の周波数領域に対して、調整可能な第2の閾値が設定され、
前記第2の閾値をピークとして、前記角度誤差に基づく入力値に対するゲインを減少するように規定される。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精工株式会社
保持器
6日前
日本精工株式会社
ころ軸受
26日前
日本精工株式会社
分注装置
11日前
日本精工株式会社
駆動装置
20日前
日本精工株式会社
ボールねじ
1か月前
日本精工株式会社
ボールねじ
26日前
日本精工株式会社
締結用工具
8日前
日本精工株式会社
遊星歯車装置
今日
日本精工株式会社
送りねじ装置
18日前
日本精工株式会社
風力発電装置
1か月前
日本精工株式会社
制振システム
13日前
日本精工株式会社
ボールねじ装置
21日前
日本精工株式会社
ボールねじ装置
21日前
日本精工株式会社
ボールねじ装置
21日前
日本精工株式会社
ボールねじ装置
18日前
日本精工株式会社
ボールねじ装置
18日前
日本精工株式会社
ボールねじ装置
18日前
日本精工株式会社
シール付き玉軸受
7日前
日本精工株式会社
ボールジョイント
1か月前
日本精工株式会社
リニアガイド装置
13日前
日本精工株式会社
逆入力遮断クラッチ
6日前
日本精工株式会社
逆入力遮断クラッチ
6日前
日本精工株式会社
トルク制御クラッチ
29日前
日本精工株式会社
搬送装置及び駆動輪
20日前
日本精工株式会社
電動摩擦クラッチ装置
14日前
日本精工株式会社
非循環式リニアガイド
28日前
日本精工株式会社
電動摩擦クラッチ装置
20日前
日本精工株式会社
抽出装置および抽出方法
20日前
日本精工株式会社
絶縁転がり軸受の製造方法
1日前
日本精工株式会社
保持器、及び保持器の製造方法
13日前
日本精工株式会社
直動案内装置及びその製造方法
1か月前
日本精工株式会社
培養容器および培地交換システム
14日前
日本精工株式会社
モータ装置、およびモータ制御方法
11日前
日本精工株式会社
ボールねじの補修装置及び補修方法
28日前
日本精工株式会社
歯車伝達機構および直動アクチュエータ
21日前
日本精工株式会社
アクチュエータおよびアクチュエータの製造方法
今日
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ