TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125014
公報種別
公開特許公報(A)
公開日
2025-08-27
出願番号
2024020822
出願日
2024-02-15
発明の名称
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
出願人
川崎重工業株式会社
,
SEQSENSE株式会社
代理人
弁理士法人有古特許事務所
主分類
G05D
1/692 20240101AFI20250820BHJP(制御;調整)
要約
【課題】互いに異なる階に存在する複数の移動ロボットがエレベータを利用する場合において、エレベータの運搬効率の低下を防止する。
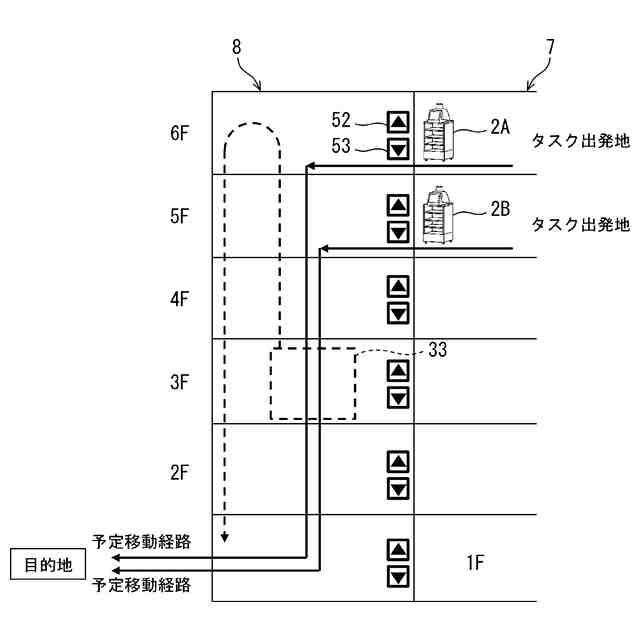
【解決手段】ロボット移動システムは、第1移動ロボットによるエレベータの利用予定と、前記第1移動ロボットとは異なる階に存在する第2移動ロボットによる前記エレベータの利用予定と、に基づいて、前記第1移動ロボット及び前記第2移動ロボットが前記エレベータを同時に利用する場合における昇降カゴを呼出す階の順番を決定するように構成された処理回路を備える。
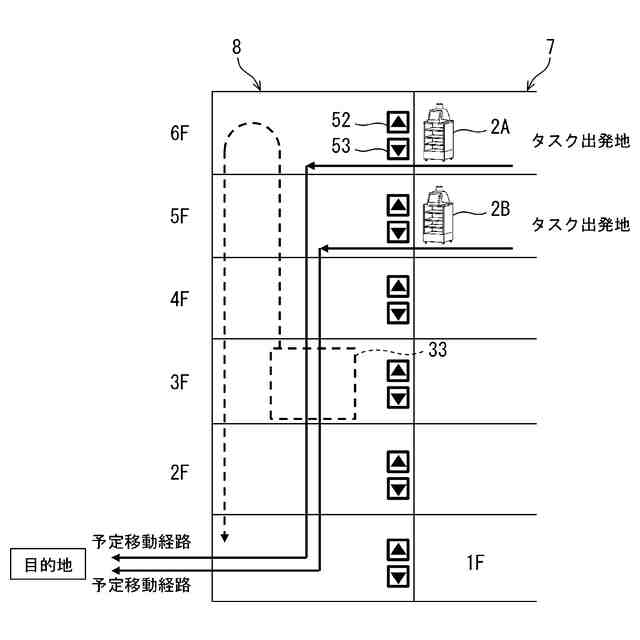
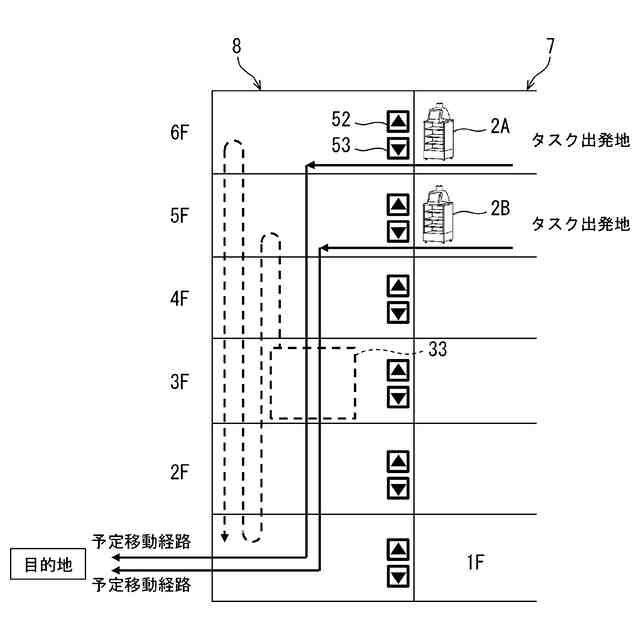
【選択図】図6
特許請求の範囲
【請求項1】
昇降カゴを含むエレベータを備えた複数階の施設内で複数の移動ロボットを移動させるロボット移動システムであって、
第1移動ロボットによる前記エレベータの利用予定と、前記第1移動ロボットとは異なる階に存在する第2移動ロボットによる前記エレベータの利用予定と、に基づいて、前記第1移動ロボット及び前記第2移動ロボットが前記エレベータを同時に利用する場合における前記昇降カゴを呼出す階の順番を決定するように構成された処理回路を備える、ロボット移動システム。
続きを表示(約 990 文字)
【請求項2】
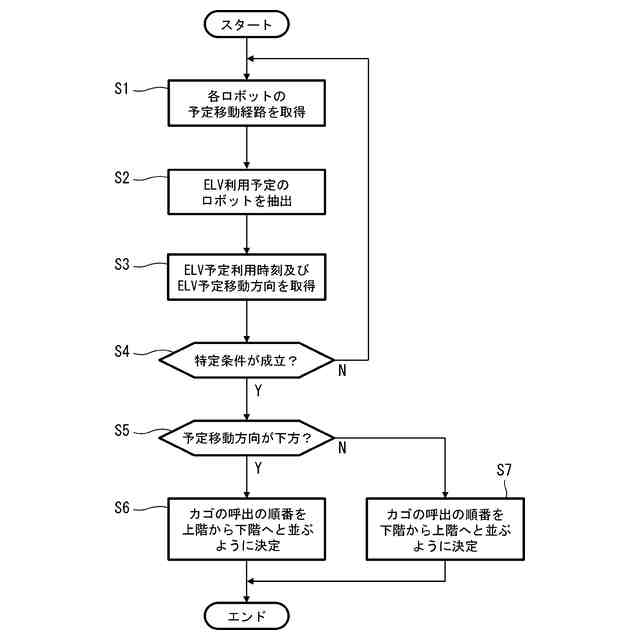
前記処理回路は、前記第1移動ロボットが前記エレベータを使うときの昇降方向である第1予定移動方向と、前記第2移動ロボットが前記第1移動ロボットと同時に前記エレベータを使うときの昇降方向である第2予定移動方向と、を取得するように構成され、
前記順番を決定することは、
前記第1予定移動方向及び前記第2予定移動方向が互いに同じ進行方向であるとの条件を含む特定条件が成立したと判定すると、前記第1移動ロボットが存在する階での前記昇降カゴの呼出しと、前記第2移動ロボットが存在する階での前記昇降カゴの呼出しと、の順番が前記進行方向に並ぶように前記順番を決定することを含む、請求項1に記載のロボット移動システム。
【請求項3】
前記順番を決定することは、
前記第1移動ロボットよりも前記第2移動ロボットが前記進行方向の進行側の階に存在し、かつ、前記第1移動ロボットよりも前記第2移動ロボットが前記エレベータに先に到着した場合に、前記第1移動ロボットの存在する階での前記昇降カゴの呼出しがあるまで、前記第2移動ロボットの存在する階での前記昇降カゴの呼出しを保留することを含む、請求項2に記載のロボット移動システム。
【請求項4】
前記処理回路は、前記第1移動ロボットが前記エレベータを使う予定時刻である第1予定利用時刻と、前記第2移動ロボットが前記エレベータを使う予定時刻である第2予定利用時刻と、を取得するように構成され、
前記特定条件は、前記第1予定利用時刻と前記第2予定利用時刻との差が閾値未満であるとの条件を含む、請求項2に記載のロボット移動システム。
【請求項5】
昇降カゴを有するエレベータを備えた複数階の施設内で複数の移動ロボットを移動させる方法であって、
第1移動ロボットによる前記エレベータの利用予定と、前記第1移動ロボットとは異なる階に存在する第2移動ロボットによる前記エレベータの利用予定と、に基づいて、前記第1移動ロボット及び前記第2移動ロボットが前記エレベータを同時に利用する場合における前記昇降カゴを呼出す階の順番を決定する、ロボット移動方法。
【請求項6】
請求項5に記載の方法を少なくとも1つのプロセッサに実行させる、ロボット移動プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット移動システム、ロボット移動方法及びロボット移動プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、エレベータのカゴ内で複数の自律移動ロボットの位置を降車順序に従って並び替えるシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/066056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
互いに異なる階に存在する複数の自律移動ロボットがそれぞれエレベータのカゴを呼び出すとき、呼出タイミングによっては、自律移動ロボットの移動効率が低下する可能性がある。
【0005】
そこで本開示の一態様は、互いに異なる階に存在する複数の移動ロボットがエレベータを利用する場合において、移動ロボットの移動効率の低下を防止することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係るロボット移動システムは、昇降カゴを有するエレベータを備えた複数階の施設内で複数の移動ロボットに移動させるロボット移動システムであって、第1移動ロボットによる前記エレベータの利用予定と、前記第1移動ロボットとは異なる階に存在する前記第2移動ロボットによる前記エレベータの利用予定と、に基づいて、前記第1移動ロボット及び前記第2移動ロボットが前記エレベータを同時に利用する場合における前記昇降カゴを呼出す階の順番を決定するように構成された処理回路を備える。
【0007】
本開示の一態様に係るロボット移動方法は、昇降カゴを有するエレベータを備えた複数階の施設内で複数の移動ロボットに移動させる方法であって、第1移動ロボットによる前記エレベータの利用予定と、前記第1移動ロボットとは異なる階に存在する前記第2移動ロボットによる前記エレベータの利用予定と、に基づいて、前記第1移動ロボット及び前記第2移動ロボットが前記エレベータを同時に利用する場合における前記昇降カゴを呼出す階の順番を決定する。
【0008】
本開示の一態様に係るロボット移動プログラムは、前記方法を少なくとも1つのプロセッサに実行させる。前記プログラムは、コンピュータ読み取り可能な記憶媒体に記憶され得る。前記記憶媒体は、非一時的(non-transitory)で有形(tangible)な媒体である。前記記憶媒体は、コンピュータ(例えば、携帯情報端末、パーソナルコンピュータ、サーバ等)に内蔵又は外付けされ得る。前記記憶媒体は、RAM、ROM、EEPROM、ストレージ等を含み、例えば、ハードディスク、フラッシュメモリ、光ディスク等とし得る。前記記憶媒体に記憶されたプログラムは、前記記憶媒体が直接接続されるコンピュータにおいて実行されてもよいし、前記記憶媒体とネットワーク(例えば、インターネット)を介して接続されたコンピュータにおいて実行されてもよい。
【発明の効果】
【0009】
本開示の一態様によれば、互いに異なる階に存在する複数の移動ロボットがエレベータを利用する場合において、移動ロボットの移動効率の低下を防止できる。
【図面の簡単な説明】
【0010】
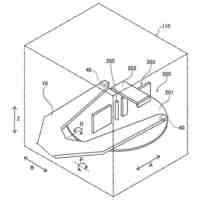
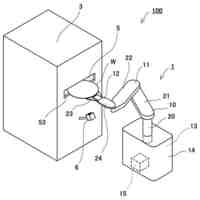
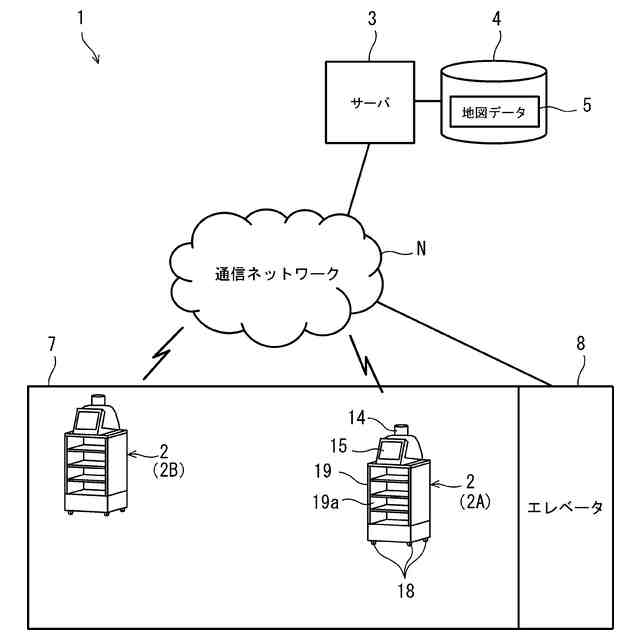
図1は、実施形態に係るロボット移動システムの概略図である。
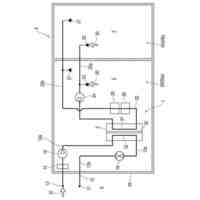
図2は、図1の移動ロボットのブロック図である。
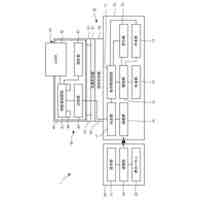
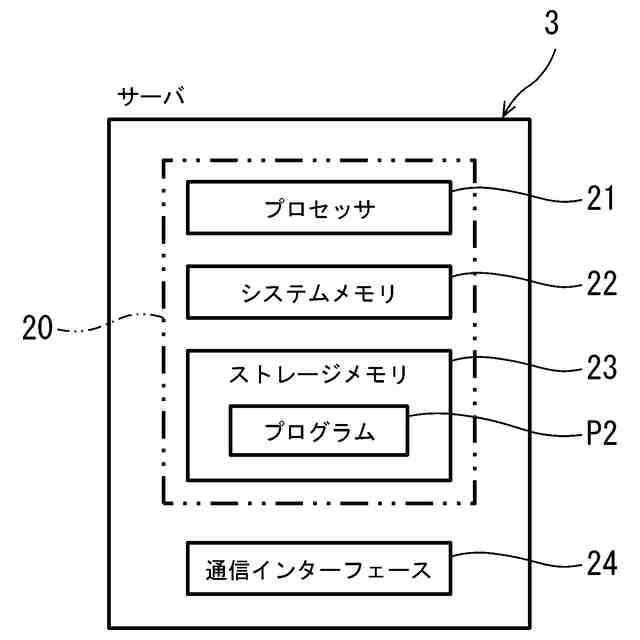
図3は、図2のサーバのブロック図である。
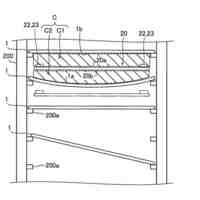
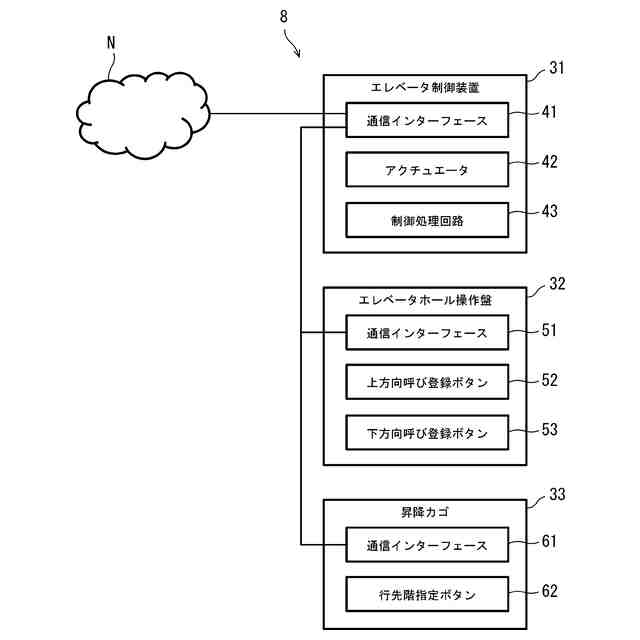
図4は、図1のエレベータのブロック図である。
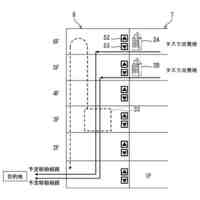
図5は、複数の移動ロボットが同時にエレベータを利用する際の課題を説明する図面である。
図6は、図1のロボット移動システムにおける昇降カゴの呼出しの順番の決定を説明する図面である。
図7は、図2のサーバの処理を説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
水素遮蔽膜
16日前
川崎重工業株式会社
排ガス採取器
今日
川崎重工業株式会社
廃棄物投入ホッパ
20日前
川崎重工業株式会社
電池セル及びその分解方法
10日前
川崎重工業株式会社
換気システム及びシェルター
16日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
6日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
6日前
川崎重工業株式会社
多重殻タンク
6日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
1日前
川崎重工業株式会社
基板搬送装置及び基板位置ずれ測定プログラム
今日
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
21日前
中国電力株式会社
ポート検出器、ポート異常検出システム、ポート検出器の製造方法及びポート異常検出方法
8日前
個人
生産早送り装置
16日前
株式会社豊田自動織機
産業車両
6日前
株式会社FUJI
工作機械
2か月前
株式会社ダイヘン
移動体
2か月前
愛知製鋼株式会社
車両用システム
今日
株式会社FUJI
加工機械ライン
1か月前
個人
作業車両自動化システム
22日前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
ローム株式会社
半導体集積回路
2か月前
トヨタ自動車株式会社
生産管理システム
27日前
株式会社ダイフク
搬送設備
20日前
トヨタ自動車株式会社
移動制御システム
16日前
株式会社ダイフク
搬送設備
2か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
トヨタ自動車株式会社
ペダル機構
3か月前
株式会社ダイフク
搬送設備
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
トヨタ自動車株式会社
減圧弁
24日前
三菱電機株式会社
自己位置推定装置
3か月前
株式会社鷺宮製作所
制御装置
2か月前
株式会社オプトン
制御プログラム生成装置
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社やまびこ
走行制御装置
4か月前
株式会社ダイフク
物品搬送設備
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ