TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126194
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2025102748,2024111738
出願日
2025-06-18,2020-10-07
発明の名称
基板搬送装置及び基板位置ずれ測定プログラム
出願人
川崎重工業株式会社
,
カワサキロボティクス(ユーエスエー),インク.
代理人
弁理士法人有古特許事務所
主分類
H01L
21/68 20060101AFI20250821BHJP(基本的電気素子)
要約
【課題】 コンパクトな基板搬送装置を提供する。
【解決手段】 基板搬送装置(1)は、基板(W)を保持するハンド(12)と、ハンド(12)を移動させるアーム(11)とを備えるロボット(10)と、ハンド(12)の移動経路(T)を設定し、ハンド(12)が移動経路(T)上を目標位置(Py)に向かって移動するようにアーム(11)を制御するロボット制御装置(15)と、所定の確認位置(Px)に位置するハンド(12)に保持された基板(W)を撮影可能に配置されているカメラ(6)と、を備え、ロボット制御装置(15)は、確認位置(Px)を通るように移動経路(T)を設定し、ハンド(12)が確認位置(Px)に位置したときにカメラ(6)が撮影した画像(G)を取得し、画像(G)に写されている基板(W)と所定の環境との距離を算出し、距離に基づいて基板(W)の基準位置(S)からの位置ずれ量(L)を算出する。
【選択図】 図1
特許請求の範囲
【請求項1】
基板搬送装置であって、
基板を保持するハンドと、前記ハンドを移動させるアームとを備えるロボットと、
前記ハンドの移動経路を設定し、前記ハンドが前記移動経路上を目標位置に向かって移動するように前記アームを制御するロボット制御装置と、
前記ハンドの進行方向を撮影可能に前記ハンドに備えられ、所定の確認位置に位置する前記ハンドに保持された前記基板及び前記基板を取り巻く所定の環境を撮影するカメラと、を備え、
前記ロボット制御装置は、前記確認位置を通るように前記移動経路を設定し、前記ハンドが前記確認位置に位置したときに前記カメラが撮影した画像を取得し、前記画像に写されている前記基板と前記所定の環境との距離を算出し、前記距離に基づいて前記基板の基準位置からの位置ずれ量を算出する、基板搬送装置。
続きを表示(約 690 文字)
【請求項2】
前記カメラは、前記基板及び前記環境を立体的に撮像するステレオビデオカメラである、請求項1に記載の基板搬送装置。
【請求項3】
前記ロボット制御装置は、前記位置ずれ量に基づいて前記目標位置を補正する、請求項1又は2に記載の基板搬送装置。
【請求項4】
前記ハンドは、前記基準位置からの位置ずれ方向への位置ずれを許容し、
前記ロボット制御装置は、前記画像に写されている前記位置ずれ方向における前記基板の一対の端部と前記環境との一対の間隙の寸法に基づいて、前記基板の前記基準位置からの位置ずれ量を算出する、請求項1乃至3の何れか1項に記載の基板搬送装置。
【請求項5】
前記基準位置は、前記確認位置において、一対の間隙の寸法が互いに等しくなる位置である、請求項4に記載の基板搬送装置。
【請求項6】
前記環境は、前記移動経路上を移動する前記基板が通過する基板処理設備のゲートの開口周縁である、請求項1乃至5の何れか1項に記載の基板搬送装置。
【請求項7】
所定の確認位置を通るように移動経路を設定し、
基板を保持する基板搬送装置のハンドであって、前記移動経路上を移動するハンドが前記確認位置に位置したときに前記ハンドの進行方向を撮影可能に前記ハンドに備えられたカメラが撮影した画像を取得し、
前記画像に写されている前記基板と前記基板を取り巻く所定の環境との距離を算出し、
前記距離に基づいて前記基板の基準位置からの位置ずれ量を算出する、基板位置ずれ測定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、基板搬送装置及び基板位置ずれ測定方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から基板の自動位置合せ装置が知られている。例えば特許文献1の基板の自動位置合せ装置は、2つのセンサーと2つの光源と基板を搬送する搬送チャックとを備えている。センサーと光源は、基板を挟んで上下に、且つ基板の搬送方向に関して対称となる位置で、基板の周縁部が2つのセンサーと光源間を横切るように設置されている。そして、搬送チャックが基板を吸引止着して移動させ、2つのセンサが遮光されたときのセンサー出力に基づいて基板の中心位置を算出し、その上で基板の基準点座標からのずれ量を算出する。
【先行技術文献】
【特許文献】
【0003】
特開昭63-94653号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特開昭63-94653号公報に記載の自動位置合せ装置は、位置ずれ量を算出するにあたり、基板を搬送方向に向けて一直線に大きく動かす必要があり、装置が大型化しやすいという問題があった。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明のある態様に係る基板搬送装置は、基板を保持するハンドと、前記ハンドを移動させるアームとを備えるロボットと、前記ハンドの移動経路を設定し、前記ハンドが前記移動経路上を目標位置に向かって移動するように前記アームを制御するロボット制御装置と、所定の確認位置に位置する前記ハンドに保持された前記基板を撮影可能に配置されているカメラと、を備え、前記ロボット制御装置は、前記確認位置を通るように前記移動経路を設定し、前記ハンドが前記確認位置に位置したときに前記カメラが撮影した画像を取得し、前記画像に写されている前記基板と所定の環境との距離を算出し、前記距離に基づいて前記基板の基準位置からの位置ずれ量を算出する。
【0006】
この構成によれば、確認位置において基板の位置ずれを測定することができ、基板の位置ずれを補償することができる基板搬送装置をコンパクトにすることができる。
【発明の効果】
【0007】
本発明は、基板搬送装置をコンパクトにすることができるという効果を奏する。
【図面の簡単な説明】
【0008】
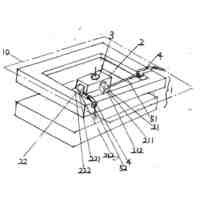
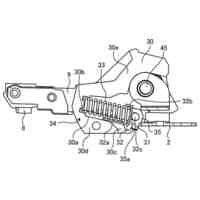
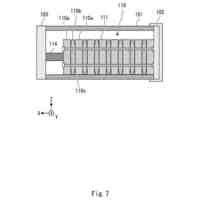
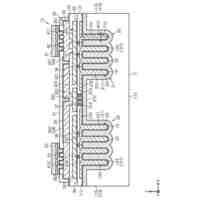
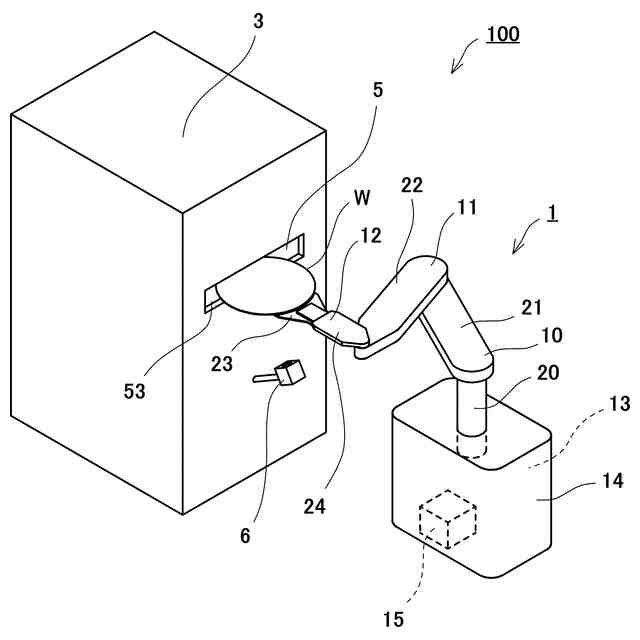
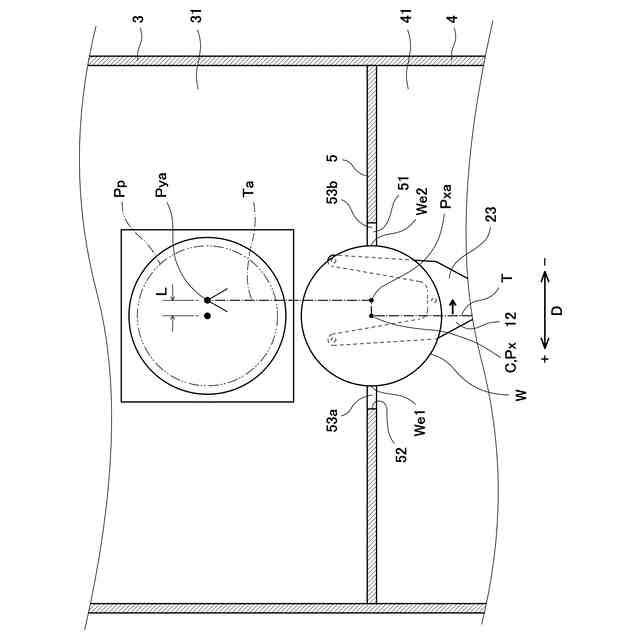
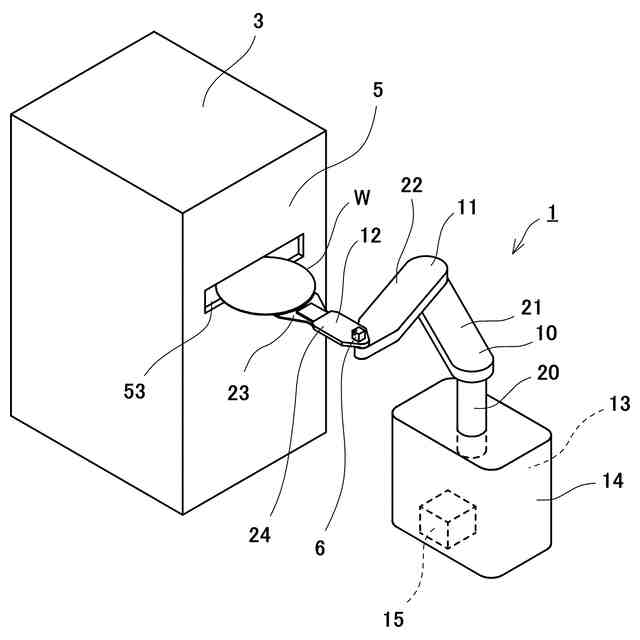
実施の形態に係る基板搬送装置を備える基板処理設備の構成例を示す斜視図である。
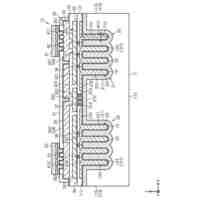
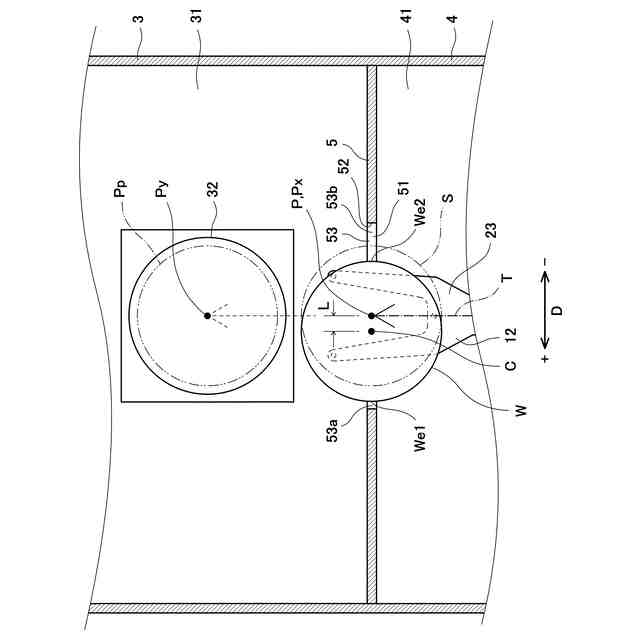
図1の基板処理設備の構成例を示す平面図である。
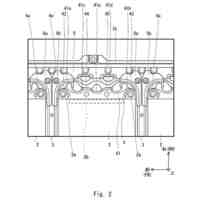
図1の基板処理設備の動作例を示す平面図であり、ハンドが確認位置に位置する状態を示す図である。
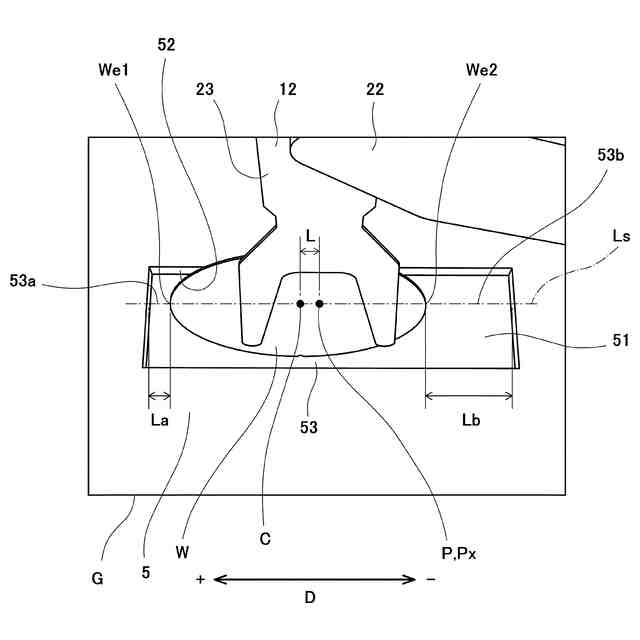
図1の基板処理設備の動作例を示す図であり、確認位置に位置するハンドをカメラが撮影した画像を示す図である。
図1の基板処理設備の動作例を示す平面図であり、ハンドの移動経路を修正した状態を示す図である。
図1の基板搬送装置の変形例を示す図である。
【発明を実施するための形態】
【0009】
以下、実施の形態について、図面を参照しながら説明する。なお、以下の実施の形態によって本発明が限定されるものではない。また、以下では、全ての図を通じて、同一又は相当する要素には同一の参照符号を付して、その重複する説明を省略する。
【0010】
図1は、実施の形態に係る基板搬送装置1を備える基板処理設備100の構成例を示す斜視図である。図2は、基板処理設備100の構成例を示す平面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
雄端子
18日前
個人
後付地震遮断機
22日前
個人
超精密位置決め機構
23日前
東レ株式会社
積層多孔質膜
26日前
愛知電機株式会社
電力機器
15日前
ヒロセ電機株式会社
端子
15日前
CKD株式会社
巻回装置
25日前
個人
フリー型プラグ安全カバー
1日前
日機装株式会社
加圧装置
10日前
ローム株式会社
半導体装置
10日前
個人
マルチバンドコイルアンテナ
1か月前
株式会社GSユアサ
蓄電装置
5日前
株式会社GSユアサ
蓄電装置
5日前
住友電装株式会社
端子
17日前
三菱電機株式会社
回路遮断器
11日前
矢崎総業株式会社
電線
1か月前
株式会社GSユアサ
蓄電装置
29日前
株式会社大阪ソーダ
複合固体電解質
1か月前
沖電気工業株式会社
アンテナ
1日前
株式会社GSユアサ
蓄電素子
1か月前
株式会社ダイヘン
変圧器
1か月前
日本特殊陶業株式会社
保持装置
1か月前
トヨタ自動車株式会社
蓄電装置
8日前
株式会社カネカ
二次電池
4日前
日本特殊陶業株式会社
保持装置
25日前
日本化薬株式会社
電流遮断装置
23日前
ダイハツ工業株式会社
固定治具
1か月前
ローム株式会社
半導体装置
5日前
住友電装株式会社
コネクタ
17日前
三菱自動車工業株式会社
放熱構造
10日前
日新イオン機器株式会社
イオン注入装置
10日前
ローム株式会社
チップ部品
1か月前
ローム株式会社
チップ部品
1か月前
ローム株式会社
チップ部品
1か月前
TOWA株式会社
製造装置
1か月前
トヨタ自動車株式会社
電池パック
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ