TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126339
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2025110643,2022529755
出願日
2025-06-30,2021-06-11
発明の名称
継手装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
A61F
2/64 20060101AFI20250821BHJP(医学または獣医学;衛生学)
要約
【課題】動力源の動力により連接部を伸展及び屈曲させることが可能な継手装置を提供する。
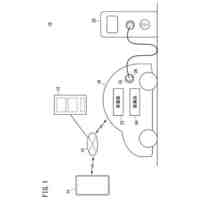
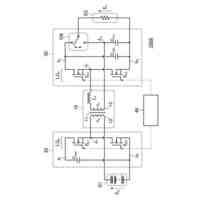
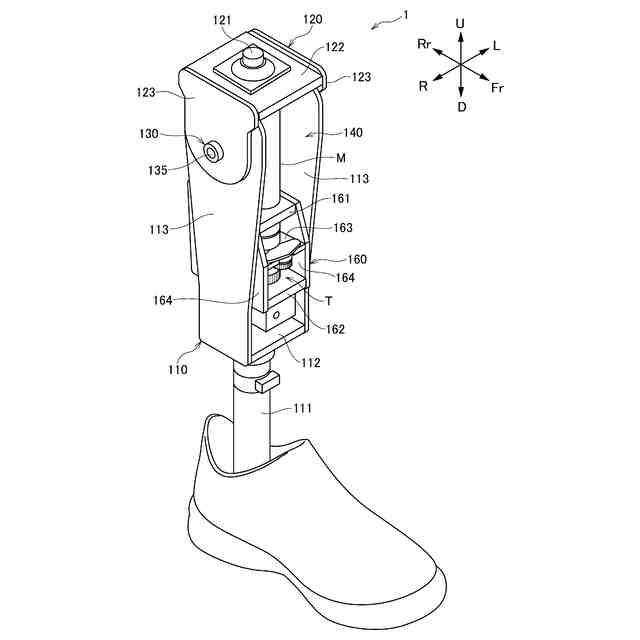
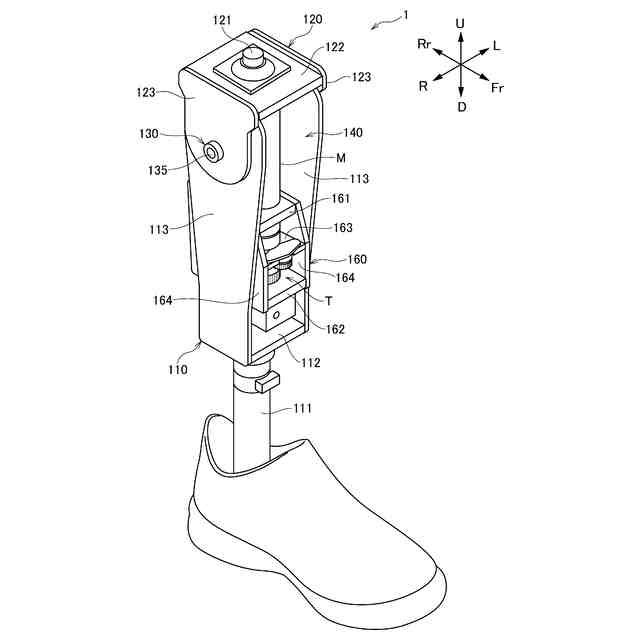
【解決手段】電動義足1は、膝下側部材110と、膝上側部材120と、膝下側部材110と膝上側部材120との成す角を変更可能に連接する膝関節機構130と、伸縮することにより膝下側部材110と膝上側部材120との成す角を変更可能な伸縮装置140と、を備える。伸縮装置140は、モータMと、モータMの動力を伝達する変速機Tと、を備える。変速機Tは、モータMの動力を第1変速比で伝達する第1変速機構T1と、モータMの動力を第1変速比とは異なる第2変速比で伝達する第2変速機構T2と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
第1部材と、
第2部材と、
前記第1部材と前記第2部材との成す角を変更可能に前記第1部材と前記第2部材とを連接する連接部と、
前記第1部材と前記第2部材との前記成す角を拡大及び収縮可能な伸縮装置と、を備える継手装置であって、
前記伸縮装置は、
動力源と、
前記動力源の動力を伝達する動力伝達部と、を備え、
前記動力伝達部は、
前記動力を第1変速比で伝達する第1動力伝達路と、
前記動力を前記第1変速比とは異なる第2変速比で伝達する第2動力伝達路と、を備える、継手装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、継手装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来、2つの部材を連接する連接部に用いられる継手装置として、2つの部材の成す角を変更可能な伸縮装置を備えるものが知られている。このような継手装置として、例えば、膝関節に用いられる義足がある。特許文献1には、切断脚の断端部に装着される義足の大腿ソケット内に切断脚の断端部の筋肉の収縮運動を検知するセンサーを設け、膝継手部の屈曲及び伸展の抵抗を調整する液圧シリンダーの可変バルブの絞り具合を、センサーからの検知情報により制御することが記載されている。
【先行技術文献】
【特許文献】
【0003】
日本国特開平11-19105号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の義足では、屈曲及び伸展の抵抗を発生させることはできても、屈曲及び伸展の動力を発生させることはできなかった。特に、階段をスムーズに昇るためには、荷重が作用した状態で膝関節を伸展させる必要があった。
【0005】
本発明は、動力源の動力により連接部を伸展及び屈曲させることが可能な継手装置を提供する。
【課題を解決するための手段】
【0006】
本発明は、
第1部材と、
第2部材と、
前記第1部材と前記第2部材との成す角を変更可能に前記第1部材と前記第2部材とを連接する連接部と、
前記第1部材と前記第2部材との前記成す角を拡大及び収縮可能な伸縮装置と、を備える継手装置であって、
前記伸縮装置は、
動力源と、
前記動力源の動力を伝達する動力伝達部と、を備え、
前記動力伝達部は、
前記動力を第1変速比で伝達する第1動力伝達路と、
前記動力を前記第1変速比とは異なる第2変速比で伝達する第2動力伝達路と、を備える。
【発明の効果】
【0007】
本発明によれば、動力源の動力を伝達する動力伝達部を介して連接部を伸展及び屈曲させることができる。
【図面の簡単な説明】
【0008】
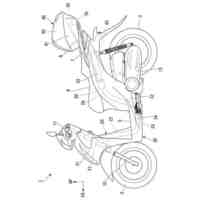
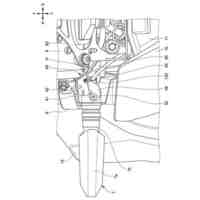
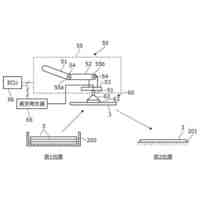
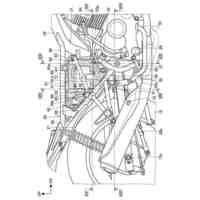
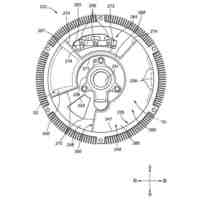
本発明の第1実施形態の電動義足を斜め前方から見た斜視図である。
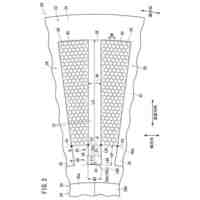
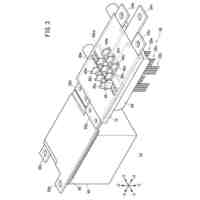
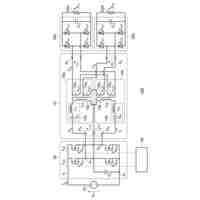
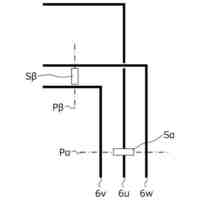
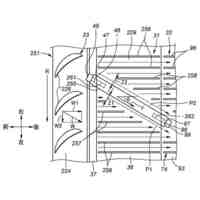
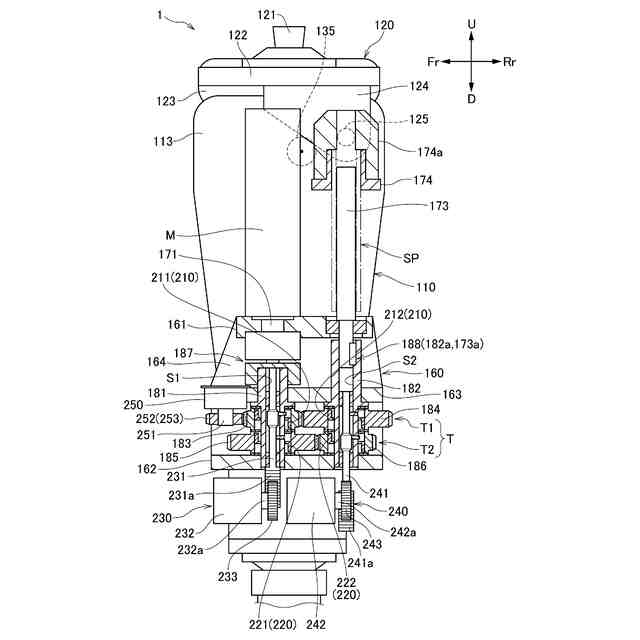
図1の電動義足の動力伝達部を示す図である。
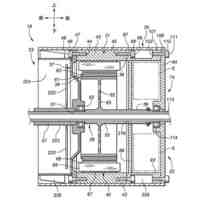
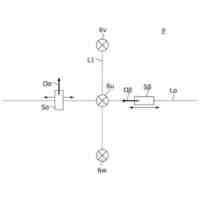
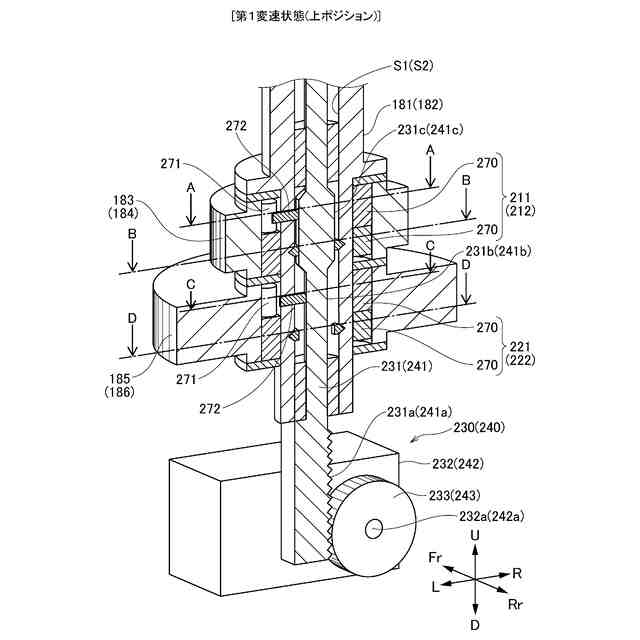
図2の動力伝達部において、第1断続機構の第1断続部が強制フリー状態、第2断続機構の第3断続部が動力伝達可能状態となる第1変速状態を示す図である。
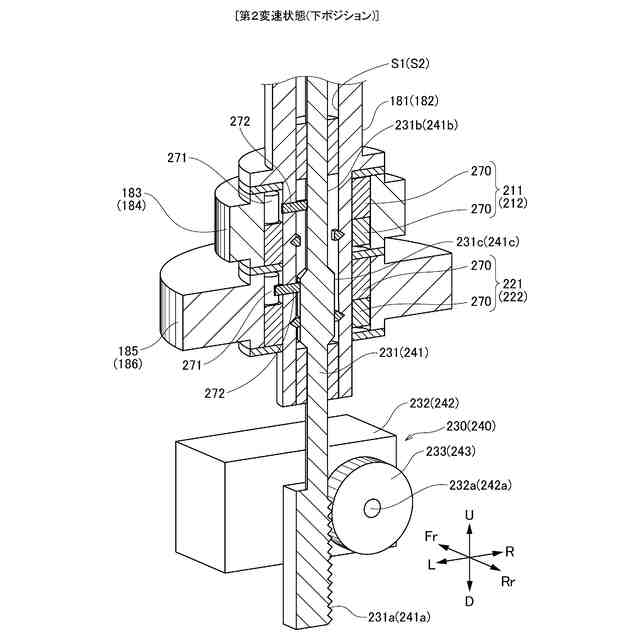
図2の動力伝達部において、第1断続機構の第1断続部が動力伝達可能状態、第2断続機構の第3断続部が強制フリー状態となる第2変速状態を示す図である。
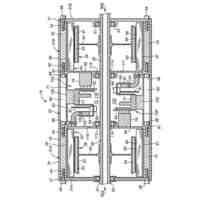
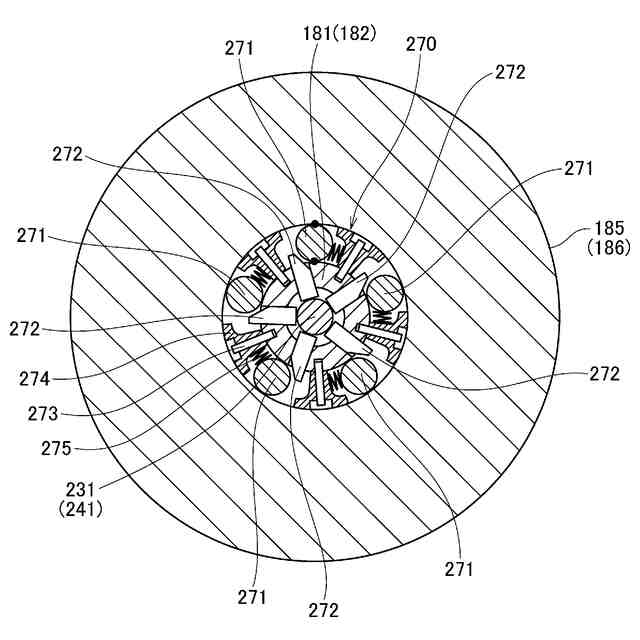
図3のA-A断面図である。
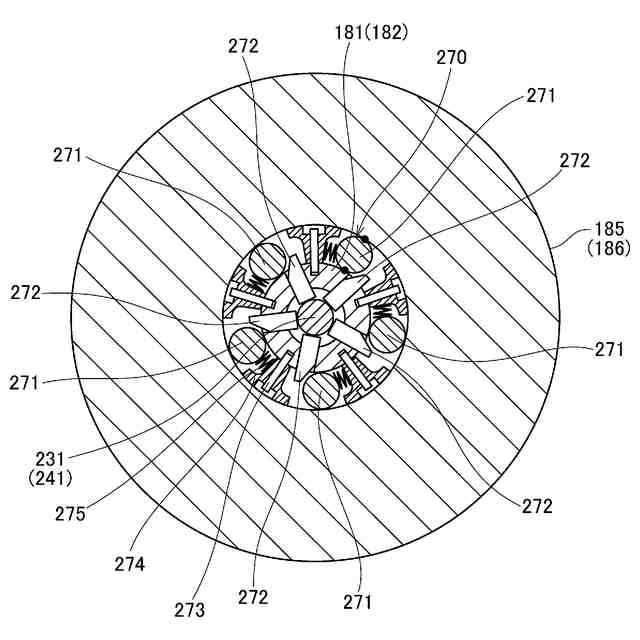
図3のB-B断面図である。
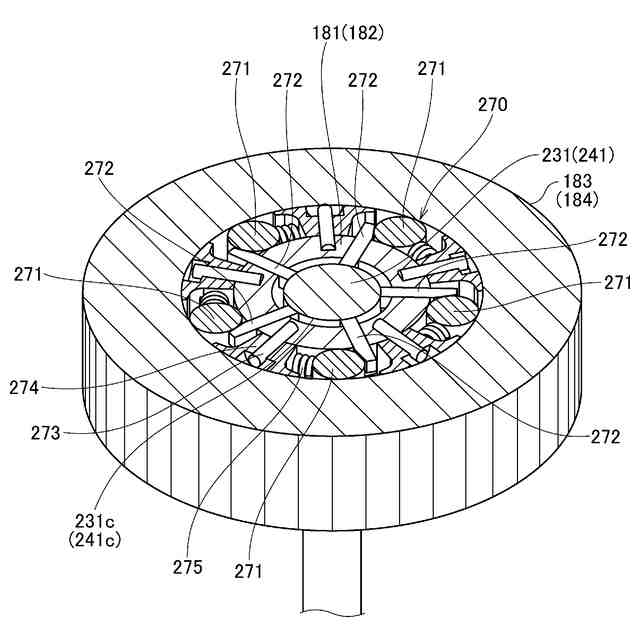
図3のC-C断面の斜視図である。
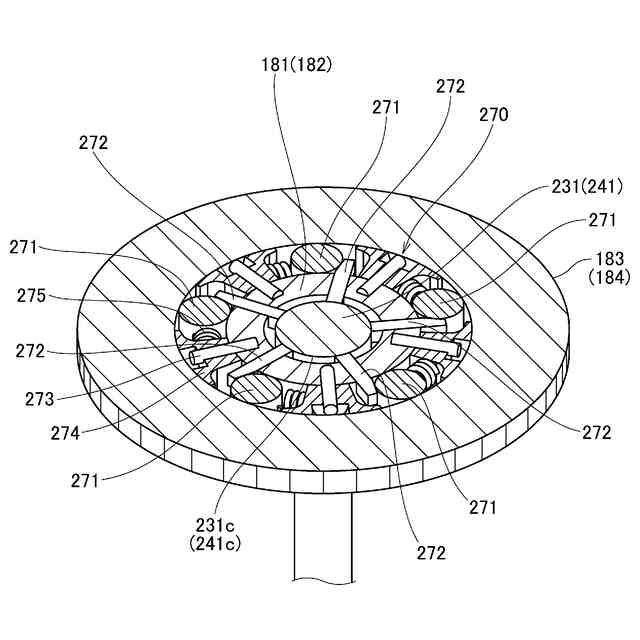
図3のD-D断面の斜視図である。
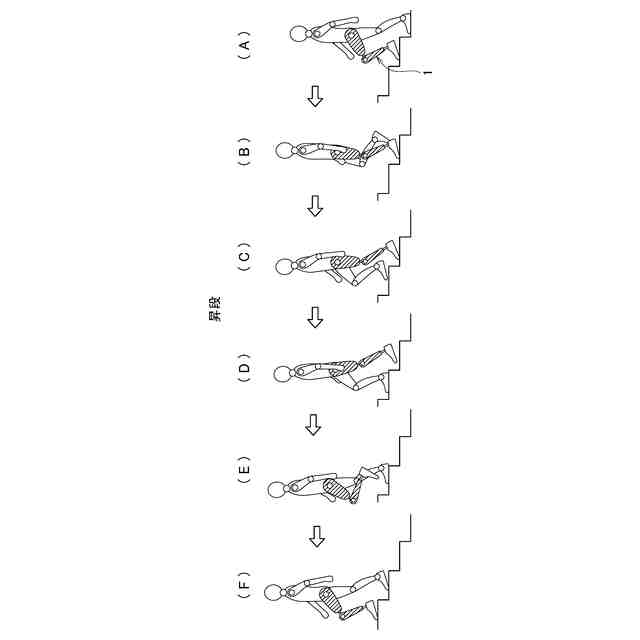
(A)~(F)は、昇段時の人間及び電動義足の動作を示す図である。
昇段時に、膝関節機構を屈曲した状態から伸展する場合(図9の(A)→(B))の動力を説明する図である。
昇段時に、膝関節機構を伸展した状態から屈曲する場合(図9の(D)→(E))の動力を説明する図である。
昇段時、平地歩行時及び降段時の人間及び電動義足の動作を示す図である。
降段時又は平地歩行時に、外力を減衰しつつ、膝関節機構を伸展した状態から屈曲する場合の動力を説明する図である。
変形例の電動義足を示す図であり、平地歩行時に、外力を減衰しつつ、膝関節機構を屈曲した状態から伸展する場合の動力を説明する図である。
本発明の第2実施形態の電動義足の動力伝達部を示す図である。
本発明の第3実施形態の電動義足の動力伝達部を示す図である。
二方向クラッチの断面図である。
図17に示すリテーナの一例(ローラ、ガイド及びゴム球を含む)示す斜視図である。
図17に示すリテーナの他例(ローラ、ガイド及びOリングを含む)示す斜視図である。
図16に示す第2断続部及び第4断続部における第2操作機構240の動作を示す図であり、(A)は第2断続部及び第4断続部がオフの状態を示す図、(B)は第2断続部がオン、第4断続部がオフの状態を示す図、(C)は第2断続部がオフ、第4断続部がオンの状態を示す図である。
(A)は、第2断続部がオフの状態を示す図16のA-A位置の断面図であり、(B)はそのときの第2操作ロッド241の位置を示す図である。
(A)は、第2断続部がオフからオンに操作された状態を示す図16のA-A位置の断面図であり、(B)はそのときの第2操作ロッド241の位置を示す図である。
(A)は、図16に示す第2断続部の正転オン状態を示す図16のA-A位置の断面図であり、(B)はそのときの第2操作ロッド241の位置を示す図である。
(A)は、図16に示す第2断続部の逆転オン状態を示す図16のA-A位置の断面図であり、(B)はそのときの第2操作ロッド241の位置を示す図である。
(A)は、図16に示す第2断続部の正転オン状態を示す図16のA-A位置の断面図であり、(B)はそのときの第2操作ロッド241の位置を示す図である。
(A)は、図16に示す第2断続部がオンからオフに操作された状態を示す図16のA-A位置の断面図であり、(B)はそのときの第2操作ロッド241の位置を示す図である。
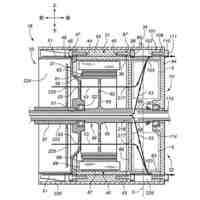
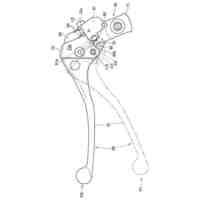
本発明の第4実施形態の電動義足を斜め前方から見た斜視図である。
図27の電動義足の分解斜視図である。
図27の電動義足の断面図である。
図27の電動義足の伸展状態を示す要部断面図である。
図27の電動義足の屈曲中を示す要部断面図である。
図27の電動義足の最大屈曲状態を示す要部断面図である。
【発明を実施するための形態】
【0009】
以下、本発明の継手装置の一実施形態としての電動義足について図面を参照しながら説明する。なお、以下の説明では、電動義足の使用者を基準に前後方向、左右方向、上下方向を定義する。図面には、電動義足の前方をFr、後方をRr、左側をL、右側をR、上方をU、下方をDとして示す。
【0010】
[電動義足]
第1実施形態の電動義足1は、図1及び図2に示すように、ひざのない人の脚部に装着される義足であり、ひざの下側に位置する膝下側部材110と、大腿部に装着されひざの上側に位置する膝上側部材120と、膝下側部材110と膝上側部材120との成す角を変更可能に連接する膝関節機構130と、伸縮することにより膝下側部材110と膝上側部材120との成す角を変更可能な伸縮装置140と、不図示のバッテリと、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
収納部
18日前
本田技研工業株式会社
板ばね
24日前
本田技研工業株式会社
ロボット
24日前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
積層装置
23日前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
搬送装置
16日前
本田技研工業株式会社
鞍乗型車両
17日前
本田技研工業株式会社
電池パック
26日前
本田技研工業株式会社
電力変換装置
10日前
本田技研工業株式会社
管理システム
6日前
本田技研工業株式会社
ガス回収装置
17日前
本田技研工業株式会社
電力変換装置
6日前
本田技研工業株式会社
物体検出装置
11日前
本田技研工業株式会社
外界認識装置
13日前
本田技研工業株式会社
薄板搬送装置
12日前
本田技研工業株式会社
導体接合方法
5日前
本田技研工業株式会社
物体検出装置
9日前
本田技研工業株式会社
電流検出装置
11日前
本田技研工業株式会社
電流検出装置
11日前
本田技研工業株式会社
電力変換装置
10日前
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
位置推定装置
5日前
本田技研工業株式会社
鞍乗り型車両
3日前
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
画像処理装置
1か月前
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
電気駆動装置
1か月前
本田技研工業株式会社
運転評価装置
1か月前
本田技研工業株式会社
鞍乗り型車両
19日前
本田技研工業株式会社
鞍乗り型車両
19日前
本田技研工業株式会社
情報提供装置
25日前
本田技研工業株式会社
位置決め装置
23日前
本田技研工業株式会社
車両制御装置
5日前
本田技研工業株式会社
固体二次電池
1か月前
本田技研工業株式会社
体幹用装着具
27日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ