TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025128995
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024105626
出願日
2024-06-28
発明の名称
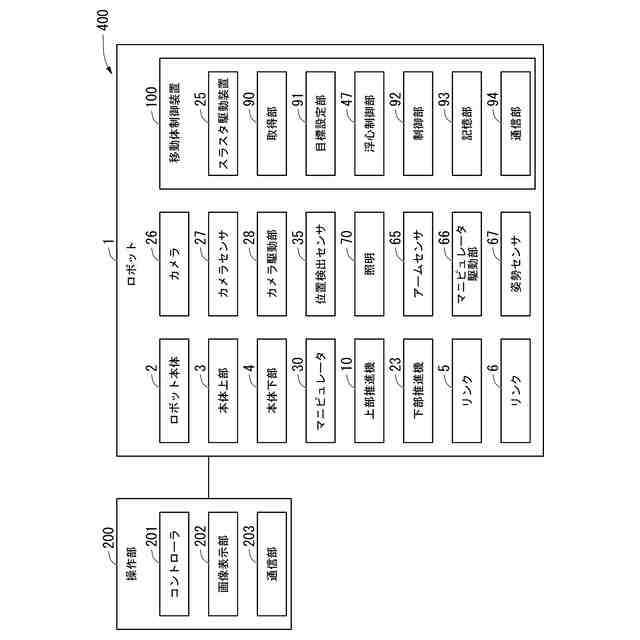
移動体制御システム、移動体制御装置、および移動体制御方法
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/49 20240101AFI20250827BHJP(制御;調整)
要約
【課題】浮力材等の駆動部の姿勢ごとの近似式構築をせずに、機体を目標の姿勢に保つことができる移動体制御システム、移動体制御装置、および移動体制御方法を提供することを目的とする。
【解決手段】ロボット本体と、ロボット本体に対し相対的に密度が小さく、フローティングデバイスの浮心を変更可能な駆動部を備えるフローティングデバイスと、浮心位置と、重心位置と、浮心位置と重心位置とのなす角とロボット本体の姿勢角を取得する取得部と、重心位置のなす角の目標値および浮心位置のなす角の目標値のうち少なくとも1つを設定する目標設定部と、浮心位置と重心位置との偏差と、浮心位置と重心位置との偏差の目標値と、駆動部の制御量に対する重心位置の変化を示す重心感度行列と、駆動部の制御量に対する浮心位置の変化を示す浮心感度行列とを用いてフローティングデバイスの浮心変化のための駆動部の制御量を計算する浮心制御部と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
水中での操作を行うロボットを制御するシステムであって、
ロボット本体と、
前記ロボット本体に接続される本体に対し相対的に密度が小さく、前記ロボット本体に対しフローティングデバイスの浮心を変更可能な駆動部を備える前記フローティングデバイスと、
前記ロボット本体と前記フローティングデバイスを合わせた浮心位置と、前記ロボット本体と前記フローティングデバイスを合わせた重心位置と、前記浮心位置と前記重心位置とのなす角と、前記ロボット本体の姿勢角と、を取得する取得部と、
前記ロボット全体の目標姿勢から前記重心位置のなす角の目標値、および前記ロボット全体の目標姿勢から前記浮心位置のなす角の目標値のうち少なくとも1つを設定する目標設定部と、
前記浮心位置と前記重心位置との偏差と、前記浮心位置と前記重心位置との偏差の目標値と、前記駆動部の制御量に対する前記重心位置の変化を示す重心感度行列と、前記駆動部の制御量に対する前記浮心位置の変化を示す浮心感度行列と、を用いて前記フローティングデバイスの浮心変化のための前記駆動部の制御量を計算する浮心制御部と、
を備える移動体制御システム。
続きを表示(約 1,800 文字)
【請求項2】
前記浮心制御部は、
前記浮心位置と前記重心位置とのなす角の目標値に、速度項として前記ロボット本体の姿勢角の微分値を入れてフィードバック制御を行う、
請求項1に記載の移動体制御システム。
【請求項3】
前記浮心位置と前記重心位置とのなす角の目標値に、前記ロボット本体の姿勢角の偏差の積分項をいれてフィードバック制御を行う、
請求項1または請求項2に記載の移動体制御システム。
【請求項4】
前記ロボットは、可動部と定置部とを備え、
前記可動部は、前記定置部にピッチ方向およびロール方向のうちの少なくとも1つに可動可能なリンクによって接続され、
前記浮心制御部は、計算した前記駆動部の制御量に基づいて前記リンクを前記ピッチ方向および前記ロール方向のうちの少なくとも1つに移動させることで、前記ロボット本体の前記浮心位置または前記重心位置を制御する、
請求項1または請求項2に記載の移動体制御システム。
【請求項5】
前記ロボットは、可動部と定置部とを備え、
前記可動部は、二次元に移動することにより前記ロボット全体の浮心位置または重心位置を制御する部材を備え、
前記浮心制御部は、計算した前記駆動部の制御量に基づいて前記可動部をピッチ方向およびロール方向のうちの少なくとも1つに移動させることで、前記ロボット本体の前記浮心位置または前記重心位置を制御する、
請求項1または請求項2に記載の移動体制御システム。
【請求項6】
前記浮心制御部は、
姿勢角の目標値を、目標角へ変換し、
変換された目標角を、前記浮心位置と前記重心位置との間の距離を用いて、目標浮心重心位置の偏差に変換し、
変換された目標浮心重心位置の偏差と、前記浮心位置と前記重心位置と偏差を用いて、前記フローティングデバイスの制御量に変換する、
請求項1に記載の移動体制御システム。
【請求項7】
水中での操作を行うロボット本体に接続される本体に対し相対的に密度が小さく、前記ロボット本体に対しフローティングデバイスの浮心を変更可能な駆動部を備える前記フローティングデバイスを有するロボットを制御する移動体制御装置であって、
前記ロボット本体と前記フローティングデバイスを合わせた浮心位置と、前記ロボット本体と前記フローティングデバイスを合わせた重心位置と、前記浮心位置と前記重心位置とのなす角と、前記ロボット本体の姿勢角と、を取得する取得部と、
前記ロボット全体の目標姿勢から前記重心位置のなす角の目標値、および前記ロボット全体の目標姿勢から前記浮心位置のなす角の目標値のうち少なくとも1つを設定する目標設定部と、
前記浮心位置と前記重心位置との偏差と、前記浮心位置と前記重心位置との偏差の目標値と、前記駆動部の制御量に対する前記重心位置の変化を示す重心感度行列と、前記駆動部の制御量に対する前記浮心位置の変化を示す浮心感度行列と、を用いて前記フローティングデバイスの浮心変化のための前記駆動部の制御量を計算する浮心制御部と、
を備える移動体制御装置。
【請求項8】
水中での操作を行うロボット本体に接続される本体に対し相対的に密度が小さく、前記ロボット本体に対しフローティングデバイスの浮心を変更可能な駆動部を備える前記フローティングデバイスを有するロボットを制御する移動体制御装置の制御方法であって、
取得部が、前記ロボット本体と前記フローティングデバイスを合わせた浮心位置と、前記ロボット本体と前記フローティングデバイスを合わせた重心位置と、前記浮心位置と前記重心位置とのなす角と、前記ロボット本体の姿勢角と、を取得し、
目標設定部が、前記ロボット全体の目標姿勢から前記重心位置のなす角の目標値、および前記ロボット全体の目標姿勢から前記浮心位置のなす角の目標値のうち少なくとも1つを設定し、
浮心制御部が、前記浮心位置と前記重心位置との偏差と、前記浮心位置と前記重心位置との偏差の目標値と、前記駆動部の制御量に対する前記重心位置の変化を示す重心感度行列と、前記駆動部の制御量に対する前記浮心位置の変化を示す浮心感度行列と、を用いて前記フローティングデバイスの浮心変化のための前記駆動部の制御量を計算する、
移動体制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体制御システム、移動体制御装置、および移動体制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
水中で作業を行う装置である水中用ロボットがある。このような水中用ロボットは、例えば、フレーム、推進機ユニット、おもり、浮力材、駆動機構を有している。そして、推進機ユニットは、推進力を生じさせる複数の推進機を有する。おもりは、第1軸方向における移動によって重心位置を移動させる。浮力材は、第2軸の方向における移動によって浮心位置を移動させる。駆動機構は、重りを第1軸の方向、浮力材を第2軸の方向において、互いに同期して移動させる(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6167317号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術の制御手法では、機体を目標の姿勢に保つために、例えば、浮心と重心のなす角と、浮力材の操作量の関係を一次近似し、浮力材の制御角度量を算出しているため、アームなどの駆動部の姿勢ごとに近似式を構築する必要があった。
【0005】
本発明は、上記の問題点に鑑みてなされたものであって、浮力材等の駆動部の姿勢ごとの近似式構築をせずに、機体を目標の姿勢に保つことができる移動体制御システム、移動体制御装置、および移動体制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)上記目的を達成するため、本発明の一態様に係る移動体制御システムは、水中での操作を行うロボットを制御するシステムであって、ロボット本体と、前記ロボット本体に接続される本体に対し相対的に密度が小さく、前記ロボット本体に対しフローティングデバイスの浮心を変更可能な駆動部を備える前記フローティングデバイスと、前記ロボット本体と前記フローティングデバイスを合わせた浮心位置と、前記ロボット本体と前記フローティングデバイスを合わせた重心位置と、前記浮心位置と前記重心位置とのなす角と、前記ロボット本体の姿勢角と、を取得する取得部と、前記ロボット全体の目標姿勢から前記重心位置のなす角の目標値、および前記ロボット全体の目標姿勢から前記浮心位置のなす角の目標値のうち少なくとも1つを設定する目標設定部と、前記浮心位置と前記重心位置との偏差(例えばΔx)と、前記浮心位置と前記重心位置との偏差の目標値(例えばΔx
*
)と、前記駆動部の制御量に対する前記重心位置の変化を示す重心感度行列と(例えばJ
COB
)、前記駆動部の制御量に対する前記浮心位置の変化を示す浮心感度行列と(例えばJ
COG
)、を用いて前記フローティングデバイスの浮心変化のための前記駆動部の制御量を計算する浮心制御部と、を備える移動体制御システムである。
【0007】
(2)上記(1)の一態様に係る移動体制御システムにおいて、前記浮心制御部は、前記浮心位置と前記重心位置とのなす角(例えばCOX角)の目標値に、速度項として前記ロボット本体の姿勢角の微分値を入れてフィードバック制御を行うようにしてもよい。
【0008】
(3)上記(1)または(2)の一態様に係る移動体制御システムにおいて、前記浮心位置と前記重心位置とのなす角(例えばCOX角)の目標値に、前記ロボット本体の姿勢角の偏差の積分項をいれてフィードバック制御を行うようにしてもよい。
【0009】
(4)上記(1)から(3)のうちのいずれか1つの一態様に係る移動体制御システムにおいて、前記ロボットは、可動部と定置部とを備え、前記可動部は、前記定置部にピッチ方向およびロール方向のうちの少なくとも1つに可動可能なリンクによって接続され、前記浮心制御部は、計算した前記駆動部の制御量に基づいて前記リンクを前記ピッチ方向および前記ロール方向のうちの少なくとも1つに移動させることで、前記ロボット本体の前記浮心位置または前記重心位置を制御するようにしてもよい。
【0010】
(5)上記(1)から(3)のうちのいずれか1つの一態様に係る移動体制御システムにおいて、前記ロボットは、可動部と定置部とを備え、前記可動部は、二次元に移動することにより前記ロボット全体の浮心位置または重心位置を制御する部材を備え、前記浮心制御部は、計算した前記駆動部の制御量に基づいて前記可動部をピッチ方向およびロール方向のうちの少なくとも1つに移動させることで、前記ロボット本体の前記浮心位置または前記重心位置を制御するようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
21日前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
7日前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
愛知製鋼株式会社
車両用システム
15日前
ローム株式会社
基準電圧源
4日前
個人
作業車両自動化システム
1か月前
ローム株式会社
半導体集積回路
3か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
11日前
トヨタ自動車株式会社
生産管理システム
1か月前
三栄ハイテックス株式会社
基準電圧回路
3か月前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社オプトン
制御プログラム生成装置
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社鷺宮製作所
制御装置
2か月前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
キヤノン株式会社
配送システム
7日前
トヨタ自動車株式会社
クラッチペダル
18日前
マーク ヘイリー
消防ロボット
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
16日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
3か月前
ルネサスエレクトロニクス株式会社
半導体装置
21日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ


































