TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131893
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2025104380,2021055300
出願日
2025-06-20,2021-03-29
発明の名称
移動体の制御装置及び制御方法、並びに移動体
出願人
クラスターダイナミクス株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/693 20240101AFI20250902BHJP(制御;調整)
要約
【課題】通信遅延等の種々の遅延を許容可能な移動体の制御装置及び制御方法、並びに移動体を提供する。
【解決手段】
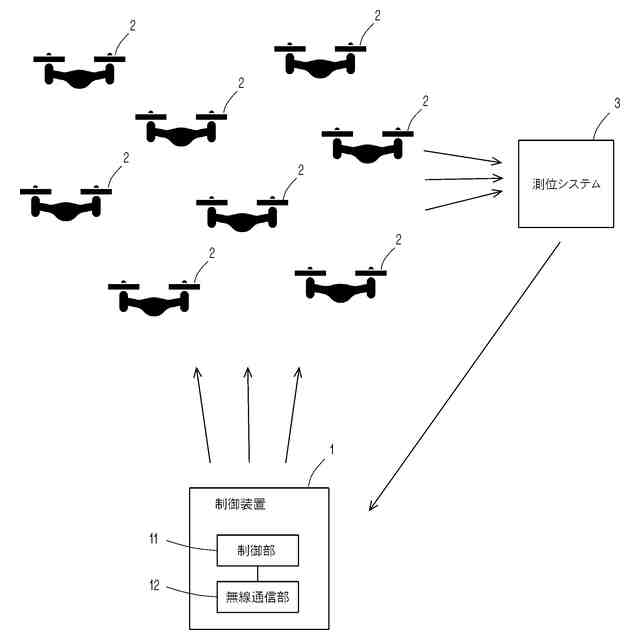
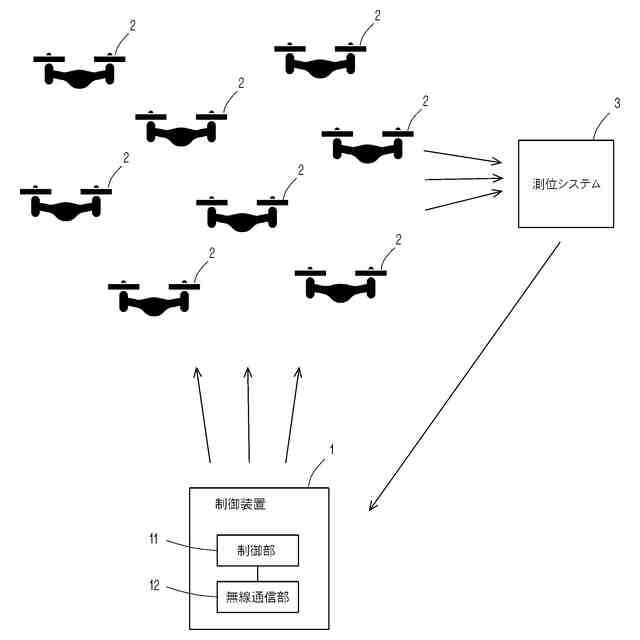
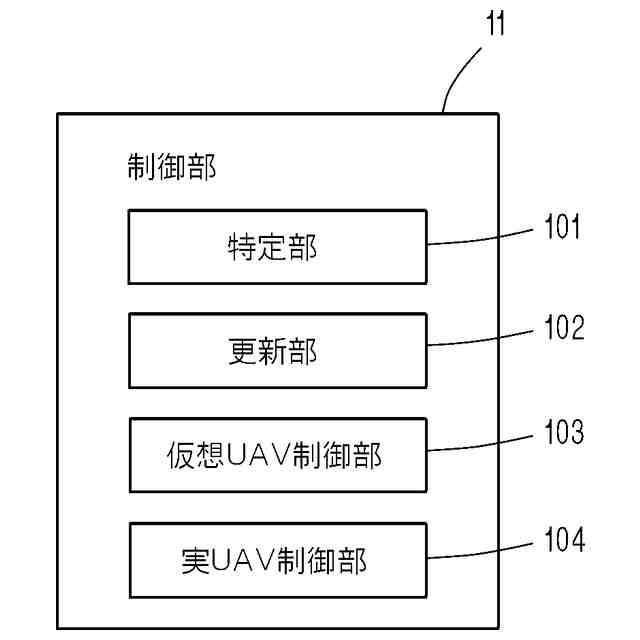
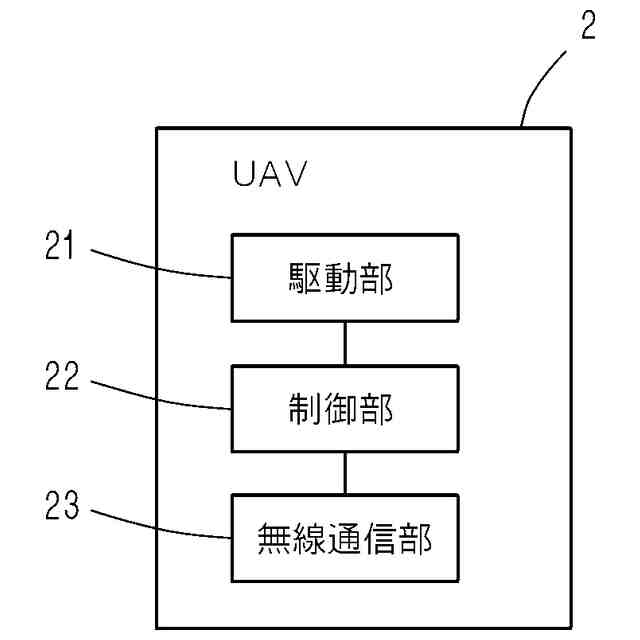
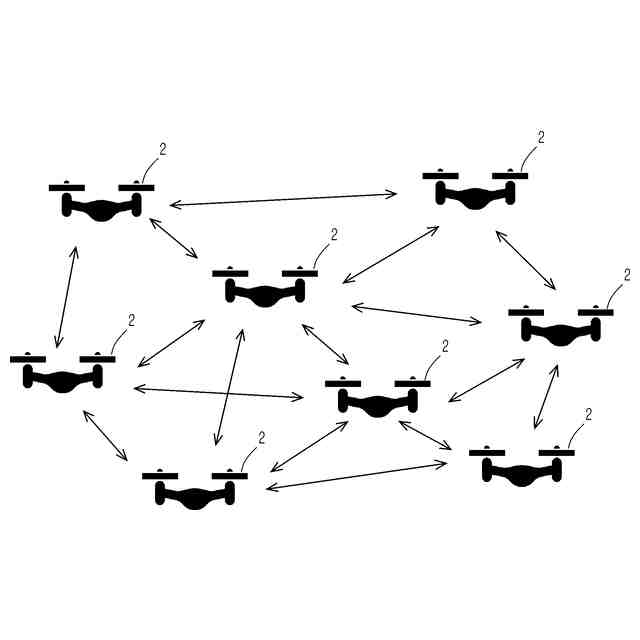
制御装置1は、UAV群に含まれる各UAV2の実空間における挙動に基づいて仮想空間を生成し、その仮想空間における各UAV2の挙動に基づいて、実空間における各UAV2の挙動を制御する。制御装置1は、仮想空間における一のUAV2の将来の移動経路及び過去の移動経路を特定する特定部と、仮想空間において、他のUAV2が前記将来の移動経路及び前記過去の移動経路を通過しないように、前記他のUAV2の挙動を制御する仮想移動体制御部と、仮想空間における前記他のUAV2の挙動に応じて、実空間における前記他のUAV2の挙動を制御する実移動体制御部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動体群に含まれる各移動体の実空間における挙動に基づいて仮想空間を生成し、前記仮想空間における各移動体の挙動に基づいて、実空間における各移動体の挙動を制御する移動体の制御装置であって、
前記移動体群に含まれる一の移動体の前記仮想空間における過去の移動経路を特定する特定部と、
前記仮想空間において、前記移動体群に含まれる他の移動体が前記一の移動体の前記過去の移動経路を通過しないように、前記他の移動体の挙動を制御する仮想移動体制御部と、
前記仮想空間における前記他の移動体の挙動に応じて、実空間における前記他の移動体の挙動を制御する実移動体制御部と、
実空間における前記一の移動体が、前記一の移動体の前記過去の移動経路を通過したか否かを判定する判定部と、
前記判定部によって通過したと判定された場合に、前記一の移動体の前記過去の移動経路から、実空間において前記一の移動体が通過した移動経路を除くことにより、前記過去の移動経路を更新する更新部と
を備え、
前記仮想移動体制御部は、更新後の前記過去の移動経路を通過しないように、前記他の移動体の挙動を制御する、
移動体の制御装置。
続きを表示(約 1,000 文字)
【請求項2】
移動体群に含まれる各移動体の実空間における挙動に基づいて仮想空間を生成し、前記仮想空間における各移動体の挙動に基づいて、実空間における各移動体の挙動を制御する移動体の制御方法であって、
前記移動体群に含まれる一の移動体の前記仮想空間における過去の移動経路を特定するステップ(a)と、
前記仮想空間において、前記移動体群に含まれる他の移動体が前記一の移動体の前記過去の移動経路を通過しないように、前記他の移動体の挙動を制御するステップ(b)と、
前記仮想空間における前記他の移動体の挙動に応じて、実空間における前記他の移動体の挙動を制御するステップ(c)と、
実空間における前記一の移動体が、前記一の移動体の前記過去の移動経路を通過したか否かを判定するステップ(d)と、
前記ステップ(d)において通過したと判定された場合に、前記一の移動体の前記過去の移動経路から、実空間において前記一の移動体が通過した移動経路を除くことにより、前記過去の移動経路を更新するステップ(e)と
を有し、
前記ステップ(b)において、更新後の前記過去の移動経路を通過しないように、前記他の移動体の挙動を制御する、
移動体の制御方法。
【請求項3】
移動体群に含まれる各移動体の実空間における挙動に基づいて仮想空間を生成し、前記仮想空間における各移動体の挙動に基づいて、実空間における自装置の挙動を制御する、前記移動体群に含まれる移動体であって、
前記仮想空間における前記移動体群に含まれる他の移動体の過去の移動経路を特定する特定部と、
前記仮想空間において、前記他の移動体の前記過去の移動経路を通過しないように、自装置の挙動を制御する仮想移動体制御部と、
前記仮想空間における自装置の挙動に応じて、実空間における自装置の挙動を制御する実移動体制御部と、
実空間における前記他の移動体が、前記他の移動体の前記過去の移動経路を通過したか否かを判定する判定部と、
前記判定部によって通過したと判定された場合に、前記他の移動体の前記過去の移動経路から、実空間において前記他の移動体が通過した移動経路を除くことにより、前記過去の移動経路を更新する更新部と
を備え、
前記仮想移動体制御部は、更新後の前記過去の移動経路を通過しないように、自装置の挙動を制御する、
を備える、移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば無人航空機(UAV:unmanned aerial vehicle)等の移動体の制御装置及び制御方法、並びに移動体に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
複数の移動体を群れとして捉え、その群れに含まれる各移動体を協調して動作させるための制御方法が、従来種々提案されている。例えば、特許文献1には、シミュレーションにより仮想空間内の移動体群の挙動を求め、その結果に基づいて実空間の移動体群の挙動を制御する方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-188893号公報
特許第6065130号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記のような移動体群を制御する技術においては、各移動体とそれらの移動体を制御する制御装置との間に通信遅延が生じたり、各移動体において応答遅延が生じたりするなど、種々の遅延が生じる。そのため、これらの遅延が生じる状況下においても、各移動体の適切な動作を実現できるようにする必要がある。
【0005】
本発明は斯かる事情に鑑みてなされたものであり、その主たる目的は、通信遅延等の種々の遅延が生じる場合であっても、安定した群制御を実現可能な移動体の制御装置及び制御方法、並びに移動体を提供することにある。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明の一の態様の移動体の制御装置は、移動体群に含まれる各移動体の実空間における挙動に基づいて仮想空間を生成し、前記仮想空間における各移動体の挙動に基づいて、実空間における各移動体の挙動を制御する移動体の制御装置であって、前記移動体群に含まれる一の移動体の前記仮想空間における将来の移動経路を特定する特定部と、前記仮想空間において、前記移動体群に含まれる他の移動体が前記一の移動体の前記将来の移動経路を通過しないように、前記他の移動体の移動を挙動する仮想移動体制御部と、前記仮想空間における前記他の移動体の挙動に応じて、実空間における前記他の移動体の挙動を制御する実移動体制御部とを備える。
【0007】
本発明の他の態様の移動体の制御装置は、移動体群に含まれる各移動体の実空間における挙動に基づいて仮想空間を生成し、前記仮想空間における各移動体の挙動に基づいて、実空間における各移動体の挙動を制御する移動体の制御装置であって、前記移動体群に含まれる一の移動体の前記仮想空間における過去の移動経路を特定する特定部と、前記仮想空間において、前記移動体群に含まれる他の移動体が前記一の移動体の前記過去の移動経路を通過しないように、前記他の移動体の挙動を制御する仮想移動体制御部と、前記仮想空間における前記他の移動体の挙動に応じて、実空間における前記他の移動体の挙動を制御する実移動体制御部とを備える。
【0008】
また、本発明の他の態様の移動体の制御装置は、移動体群に含まれる各移動体の実空間における挙動に基づいて仮想空間を生成し、前記仮想空間における各移動体の挙動に基づいて、実空間における各移動体の挙動を制御する移動体の制御装置であって、前記移動体群に含まれる一の移動体の前記仮想空間における将来の移動経路及び過去の移動経路を特定する特定部と、前記仮想空間において、前記移動体群に含まれる他の移動体が前記一の移動体の前記将来の移動経路及び前記過去の移動経路を通過しないように、前記他の移動体の挙動を制御する仮想移動体制御部と、前記仮想空間における前記他の移動体の挙動に応じて、実空間における前記他の移動体の挙動を制御する実移動体制御部とを備える。
【0009】
前記態様において、前記一の移動体の前記過去の移動経路から、実空間において前記一の移動体が通過した移動経路を除くことにより、前記過去の移動経路を更新する更新部をさらに備え、前記仮想移動体制御部は、更新後の前記過去の移動経路を通過しないように、前記他の移動体の挙動を制御してもよい。
【0010】
また、前記態様において、前記仮想空間は、各移動体を粒子と見立て、その挙動を粒子法でシミュレーションすることにより生成され、前記特定部は、前記仮想空間における粒子の軌跡を、前記移動経路として特定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
3か月前
株式会社カネカ
製造システム
24日前
株式会社ダイヘン
移動体
3か月前
オムロン株式会社
スレーブ装置
今日
愛知製鋼株式会社
車両用システム
1か月前
ローム株式会社
基準電圧源
21日前
株式会社FUJI
加工機械ライン
2か月前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
ローム株式会社
半導体集積回路
3か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
10日前
株式会社ダイフク
搬送設備
28日前
トヨタ自動車株式会社
移動制御システム
1か月前
トヨタ自動車株式会社
生産管理システム
1か月前
三栄ハイテックス株式会社
基準電圧回路
3か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社オプトン
制御プログラム生成装置
3か月前
株式会社鷺宮製作所
制御装置
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社ダイフク
物品搬送設備
10日前
キヤノン株式会社
配送システム
24日前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
3か月前
マーク ヘイリー
消防ロボット
2か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
クラッチペダル
1か月前
トヨタ自動車株式会社
制御装置
今日
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイヘン
負荷時タップ切換器
3か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
株式会社テイエルブイ
減圧弁の制御装置
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ