TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133433
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024031381
出願日
2024-03-01
発明の名称
物体認識装置、物体認識方法、および物体認識プログラム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G08G
1/16 20060101AFI20250904BHJP(信号)
要約
【課題】車両の周辺の物体認識において、さらなる認識精度の向上を図ること。
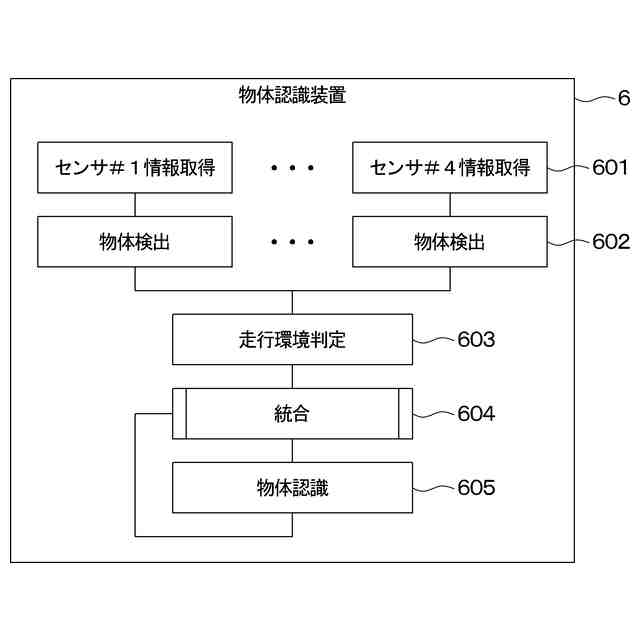
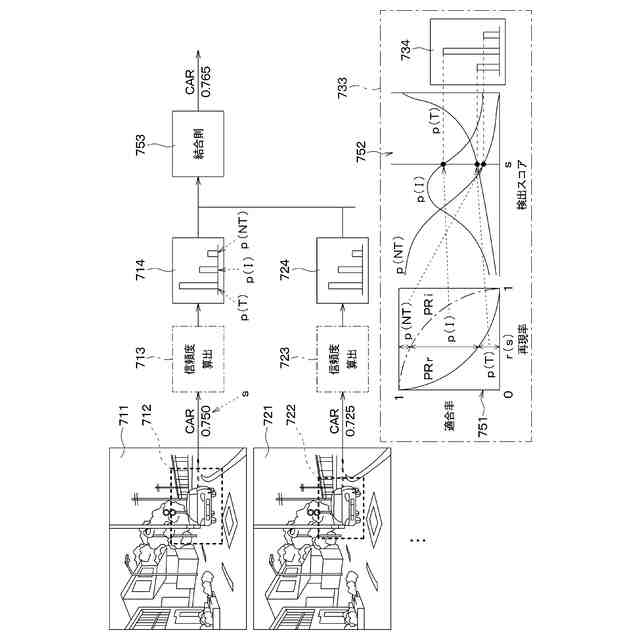
【解決手段】物体認識装置(6)は、センサ情報取得部(601)と、物体検出部(602)と、統合処理部(604)と、認識処理部(605)とを備える。統合処理部は、複数種類の物体検出センサのそれぞれについて検出性能曲線を生成するとともに当該検出性能曲線を用いて物体検出結果の信頼度を算出し、算出した複数種類の物体検出センサのそれぞれについての物体検出結果の信頼度を統合する。検出性能曲線は、車両の走行環境および/または認識処理部による物体認識結果のフィードバック情報に基づいて生成する。認識処理部は、統合処理部による信頼度の統合結果に基づいて、物体の認識を行う。
【選択図】図3
特許請求の範囲
【請求項1】
車両(V)に搭載されることで当該車両の周囲の物体(B)を認識するように構成された、物体認識装置(6)であって、
前記車両に搭載された複数種類の物体検出センサ(2)のそれぞれから検出情報を取得する、センサ情報取得部(601)と、
前記複数種類の前記物体検出センサのそれぞれについて、前記センサ情報取得部にて取得した前記検出情報に対応する物体検出結果を生成する、物体検出部(602)と、
前記複数種類の前記物体検出センサのそれぞれについて検出性能曲線を生成するとともに当該検出性能曲線を用いて前記物体検出結果の信頼度を算出し、算出した前記複数種類の前記物体検出センサのそれぞれについての前記物体検出結果の前記信頼度を統合する、統合処理部(604)と、
前記統合処理部による前記信頼度の統合結果に基づいて、前記物体の認識を行う、認識処理部(605)と、
を備え、
前記統合処理部は、前記車両の走行環境および/または前記認識処理部による物体認識結果のフィードバック情報に基づいて、前記検出性能曲線を生成する、
物体認識装置。
続きを表示(約 1,300 文字)
【請求項2】
前記統合処理部は、前記検出性能曲線として、前記物体検出センサの理論的な性能を推定した適合率-再現率曲線である理論PR曲線(PRi)と、当該物体検出センサの実際の性能を表す適合率-再現率曲線である実力PR曲線(PRr)とを生成する、
請求項1に記載の物体認識装置。
【請求項3】
前記統合処理部は、前記走行環境に基づいて、前記複数種類の前記物体検出センサのそれぞれにおける前記理論PR曲線を決定する、
請求項2に記載の物体認識装置。
【請求項4】
前記統合処理部は、前記フィードバック情報に基づいて、前記複数種類の前記物体検出センサのそれぞれにおける前記理論PR曲線を決定する、
請求項2または3に記載の物体認識装置。
【請求項5】
前記統合処理部は、「1-r
n
」で示される前記理論PR曲線における指数パラメータnを決定することで、前記複数種類の前記物体検出センサのそれぞれにおける前記理論PR曲線を決定する、
請求項4に記載の物体認識装置。
【請求項6】
車両(V)に搭載されることで当該車両の周囲の物体(B)を認識するように構成された物体認識装置(6)により実行される、物体認識方法であって、
前記車両に搭載された複数種類の物体検出センサ(2)のそれぞれから検出情報を取得し、
前記複数種類の前記物体検出センサのそれぞれについて、取得した前記検出情報に対応する物体検出結果を生成し、
前記複数種類の前記物体検出センサのそれぞれについて検出性能曲線を生成し、
当該検出性能曲線を用いて前記物体検出結果の信頼度を算出し、
算出した前記複数種類の前記物体検出センサのそれぞれについての前記物体検出結果の前記信頼度を統合し、
前記信頼度の統合結果に基づいて、前記物体を認識し、
前記検出性能曲線は、前記車両の走行環境および/または物体認識結果のフィードバック情報に基づいて生成する、
物体認識方法。
【請求項7】
前記検出性能曲線として、前記物体検出センサの理論的な性能を推定した適合率-再現率曲線である理論PR曲線(PRi)と、当該物体検出センサの実際の性能を表す適合率-再現率曲線である実力PR曲線(PRr)とを生成する、
請求項6に記載の物体認識方法。
【請求項8】
前記走行環境に基づいて、前記複数種類の前記物体検出センサのそれぞれにおける前記理論PR曲線を決定する、
請求項7に記載の物体認識方法。
【請求項9】
前記フィードバック情報に基づいて、前記複数種類の前記物体検出センサのそれぞれにおける前記理論PR曲線を決定する、
請求項7または8に記載の物体認識方法。
【請求項10】
「1-r
n
」で示される前記理論PR曲線における指数パラメータnを決定することで、前記複数種類の前記物体検出センサのそれぞれにおける前記理論PR曲線を決定する、
請求項9に記載の物体認識方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両に搭載される物体認識装置、物体認識方法、および物体認識プログラムに関するものである。
続きを表示(約 4,100 文字)
【背景技術】
【0002】
車両の周辺の物体を認識する装置として、いわゆるセンサフュージョン処理を行うものが、従来種々知られている。例えば、特許文献1に記載の外界認識装置は、検出範囲が少なくとも一部重複する複数種類のセンサを搭載した車両の外界を認識するものであって、取得部と、設定部と、生成部とを備えている。取得部は、カメラ、レーザレーダ、および電波レーダからの検出情報を取得する。レーザレーダはLiDARとも称され得る。LiDARはLight Detection and RangingあるいはLaser Imaging Detection and Rangingの略である。設定部は、検出範囲の重複部分に関する各検出情報に対して、車両の走行シーンに応じた重みを設定する。生成部は、重みを設定された各検出情報を統合して、外界の認識情報を生成する。かかる構成によれば、センサフュージョン処理によって外界をより正確に認識することが可能となる。
【0003】
具体的には、設定部は、側壁を設けられた道路におけるカーブ区間を走行する側壁カーブシーンにおいて、電波レーダによる検出情報の重みを最も小さく設定し、レーザレーダによる検出情報の重みをカメラによる検出情報の重みよりも大きく設定する。また、設定部は、明所領域から暗所領域へと進入してからの重み調整期間において、レーザレーダによる検出情報の重みをカメラによる検出情報の重みよりも大きく設定する。一方、設定部は、暗所領域から明所領域へと進入した直後の明所進入シーンにおいて、カメラによる検出情報の重みをレーザレーダによる検出情報の重みよりも小さく設定する。また、設定部は、降雪シーンにおいて、カメラによる検出情報の重みをレーザレーダによる検出情報の重みよりも小さく設定するとともに、レーザレーダによる検出情報の重みを電波レーダによる検出情報の重みよりも大きく設定する。また、設定部は、電磁波の多重反射に関する特定の電磁波条件が成立する走行シーンである場合には、カメラによる検出情報の重みを、レーザレーダおよび電波レーダによる検出情報の重みよりも大きく設定する。また、設定部は、外界の実景を映す反射物に関する特定の実景反射条件が成立する走行シーンである場合には、カメラによる検出情報の重みを、レーザレーダおよび電波レーダによる検出情報の重みよりも小さく設定する。
【先行技術文献】
【特許文献】
【0004】
特許第7347343号
【発明の概要】
【発明が解決しようとする課題】
【0005】
この種の装置において、さらなる認識精度の向上を図るための様々な試みがなされている。本開示は、上記に例示した事情等に鑑みてなされたものである。
【課題を解決するための手段】
【0006】
本開示の一側面においては、車両(V)に搭載されることで当該車両の周囲の物体(B)を認識するように構成された物体認識装置(6)は、
前記車両に搭載された複数種類の物体検出センサ(2)のそれぞれから検出情報を取得する、センサ情報取得部(601)と、
前記複数種類の前記物体検出センサのそれぞれについて、前記センサ情報取得部にて取得した前記検出情報に対応する物体検出結果を生成する、物体検出部(602)と、
前記複数種類の前記物体検出センサのそれぞれについて検出性能曲線を生成するとともに当該検出性能曲線を用いて前記物体検出結果の信頼度を算出し、算出した前記複数種類の前記物体検出センサのそれぞれについての前記物体検出結果の前記信頼度を統合する、統合処理部(604)と、
前記統合処理部による前記信頼度の統合結果に基づいて、前記物体の認識を行う、認識処理部(605)と、
を備え、
前記統合処理部は、前記車両の走行環境および/または前記認識処理部による物体認識結果のフィードバック情報に基づいて、前記検出性能曲線を生成する。
本開示の他の一側面においては、車両(V)に搭載されることで当該車両の周囲の物体(B)を認識するように構成された物体認識装置(6)により実行される物体認識方法は、以下の手順あるいは処理を含む:
前記車両に搭載された複数種類の物体検出センサ(2)のそれぞれから検出情報を取得し、
前記複数種類の前記物体検出センサのそれぞれについて、前記センサ情報取得部にて取得した前記検出情報に対応する物体検出結果を生成し、
前記複数種類の前記物体検出センサのそれぞれについて検出性能曲線を生成し、
当該検出性能曲線を用いて前記物体検出結果の信頼度を算出し、
算出した前記複数種類の前記物体検出センサのそれぞれについての前記物体検出結果の前記信頼度を統合し、
前記統合処理部による前記信頼度の統合結果に基づいて、前記物体を認識し、
前記検出性能曲線は、前記車両の走行環境および/または前記認識処理部による物体認識結果のフィードバック情報に基づいて生成する。
本開示のさらに他の一側面においては、車両(V)に搭載されることで当該車両の周囲の物体(B)を認識するように構成された物体認識装置(6)により実行される物体認識プログラムは、前記物体認識装置により実行される処理として、
前記車両に搭載された複数種類の物体検出センサ(2)のそれぞれから検出情報を取得する処理と、
前記複数種類の前記物体検出センサのそれぞれについて、前記センサ情報取得部にて取得した前記検出情報に対応する物体検出結果を生成する処理と、
前記複数種類の前記物体検出センサのそれぞれについて検出性能曲線を生成する処理と、
当該検出性能曲線を用いて前記物体検出結果の信頼度を算出する処理と、
算出した前記複数種類の前記物体検出センサのそれぞれについての前記物体検出結果の前記信頼度を統合する処理と、
前記統合処理部による前記信頼度の統合結果に基づいて、前記物体を認識する処理と、
を含み、
前記検出性能曲線を生成する前記処理にて、前記車両の走行環境および/または前記認識処理部による物体認識結果のフィードバック情報に基づいて、前記検出性能曲線を生成する。
【0007】
なお、出願書類の各欄において、各要素に括弧付きの参照符号が付される場合がある。しかしながら、かかる参照符号は、同要素と後述する実施形態に記載の具体的手段との対応関係の一例を、単に示すものにすぎない。よって、本開示は、上記の参照符号の記載によって、何ら限定されるものではない。
【図面の簡単な説明】
【0008】
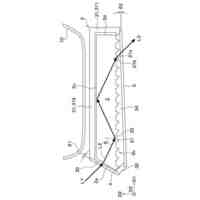
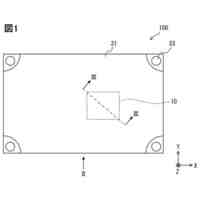
本開示の一実施形態に係る物体認識装置を備えた車載システムを搭載した車両の走行中の様子を示す概略図である。
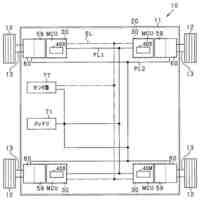
図1に示された車載システムの概略的な構成を示すブロック図である。
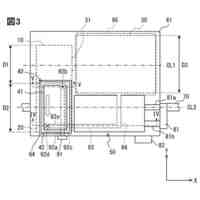
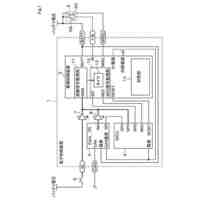
図2に示された物体認識装置の概略的な機能構成を示すブロック図である。
図3に示された物体認識装置による物体認識動作の概要を示す概念図である。
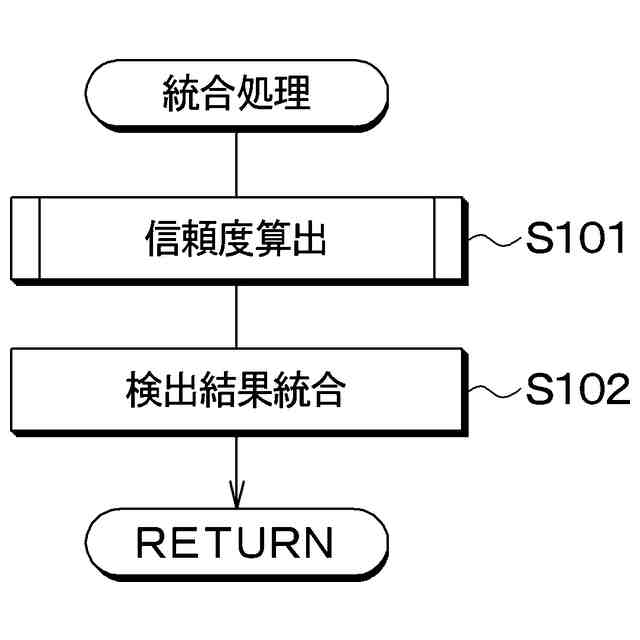
図3に示された統合処理機能により実現される統合処理の概要を示すフローチャートである。
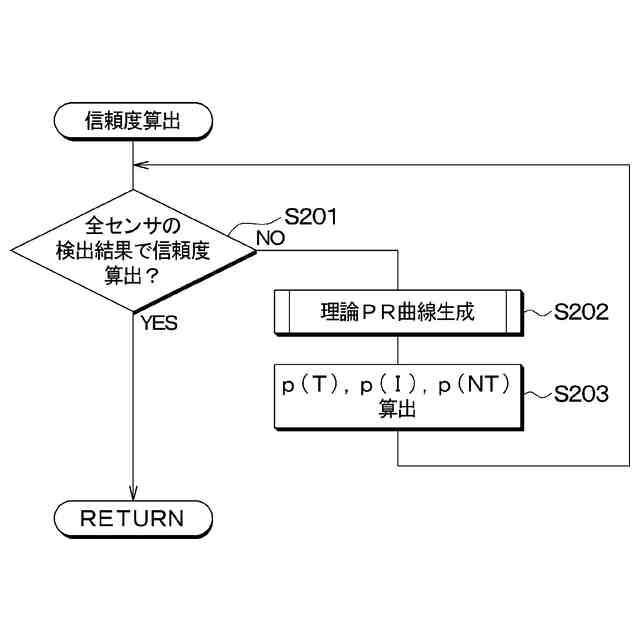
図5に示された信頼度算出処理の一具体例を示すフローチャートである。
図6に示された理論PR曲線生成処理にて生成する理論PR曲線の概要を示すグラフである。
図6に示された理論PR曲線生成処理の一具体例を示すフローチャートである。
図8に示されたK
em
算出処理にて係数K
em
を算出するために用いる表である。
図8に示されたK
rm
算出処理の一具体例を示すフローチャートである。
図10に示されたK
rm
算出処理にて係数K
rm
を算出するために用いる表である。
【発明を実施するための形態】
【0009】
(実施形態)
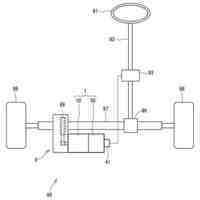
以下、本開示の例示的な実施形態や具体例について、適宜図面を参照しつつ説明する。図1を参照すると、車載システム1は、車両Vに搭載されることで、かかる車両Vにおける各種動作を実行するように構成されている。以下、車載システム1を搭載する車両Vを、「自車両」と称する。具体的には、車載システム1は、物体検出センサ2を用いて自車両の周囲の物体Bを認識し、認識結果に応じて運転支援装置3により先行車追随走行や衝突回避等の運転支援動作を実行するように構成されている。
【0010】
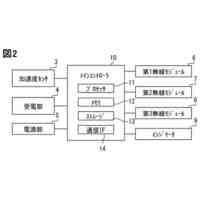
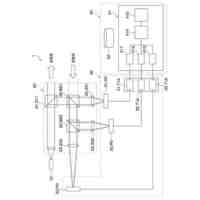
(車載システム構成)
図2を参照すると、車載システム1は、物体検出センサ2と、運転支援装置3と、車両状態センサ4と、ロケータ5と、物体認識装置6とを備えている。物体検出センサ2、運転支援装置3、車両状態センサ4、およびロケータ5と、物体認識装置6とは、車載ネットワークを介して互いに信号授受可能に接続されている。車載ネットワークは、CAN(国際登録商標:国際登録番号1048262A)等の所定の通信規格に準拠するように構成されている。CAN(国際登録商標)はController Area Networkの略とされている。なお、車載ネットワークは、CAN(国際登録商標)に準拠したメインネットワークに加えて、LINやFlexRay等に準拠したサブネットワークを有していてもよい。LINはLocal Interconnect Networkの略である。以下、車載システム1の各部の概略的な構成あるいは機能について順に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
携帯機
1か月前
株式会社デンソー
駆動装置
8日前
株式会社デンソー
光学部材
1か月前
株式会社デンソー
圧電素子
1か月前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
電子装置
9日前
株式会社デンソー
光学部材
3日前
株式会社デンソー
書込装置
9日前
株式会社デンソーウェーブ
携帯端末
29日前
株式会社デンソー
測距装置
13日前
株式会社デンソー
電子機器
1か月前
株式会社デンソー
平滑回路
2日前
株式会社デンソー
通信装置
1か月前
株式会社デンソー
電子装置
27日前
株式会社デンソー
ステータ
27日前
株式会社デンソー
電子装置
23日前
株式会社デンソー
ステータ
22日前
株式会社デンソーエレクトロニクス
発音装置
今日
株式会社デンソー
通信装置
8日前
株式会社デンソー
送電装置
23日前
株式会社デンソー
電子装置
20日前
株式会社デンソー
レーダ装置
20日前
株式会社デンソー
センサ素子
8日前
株式会社デンソー
センサ装置
1か月前
株式会社デンソー
半導体装置
23日前
株式会社デンソー
ガスセンサ
9日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
点火プラグ
22日前
株式会社デンソー
熱音響装置
27日前
株式会社デンソー
回転体装置
6日前
株式会社デンソー
小型電動車両
16日前
株式会社デンソーテン
電源制御装置
1か月前
株式会社デンソー
電力変換装置
16日前
株式会社デンソー
電子制御装置
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ