TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134621
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024195848,2024532313
出願日
2024-11-08,2024-03-04
発明の名称
搬送車の走行制御システム及び搬送車の走行制御方法
出願人
株式会社LexxPluss
代理人
One ip弁理士法人
主分類
G05D
1/244 20240101AFI20250909BHJP(制御;調整)
要約
【課題】搬送車のガイドライン検出センサの数を減らすことが可能となる搬送車の走行制御システム及び搬送車の走行制御方法を提供する。
【解決手段】本開示は、現実又は仮想のガイドラインに沿って移動可能な搬送車の走行制御システムであって、制御部と、位置姿勢取得部と、記憶部と、を備え、前記制御部は、前記搬送車の特定箇所の前記ガイドラインに対する位置情報及び姿勢情報と、前記仮想検出部の前記特定箇所に対する相対的な位置情報とに基づいて、前記ガイドラインに対する前記仮想検出部のガイドライン相対位置を推定し、推定した前記仮想検出部のガイドライン相対位置に基づいて、前記搬送車の動作を制御する。
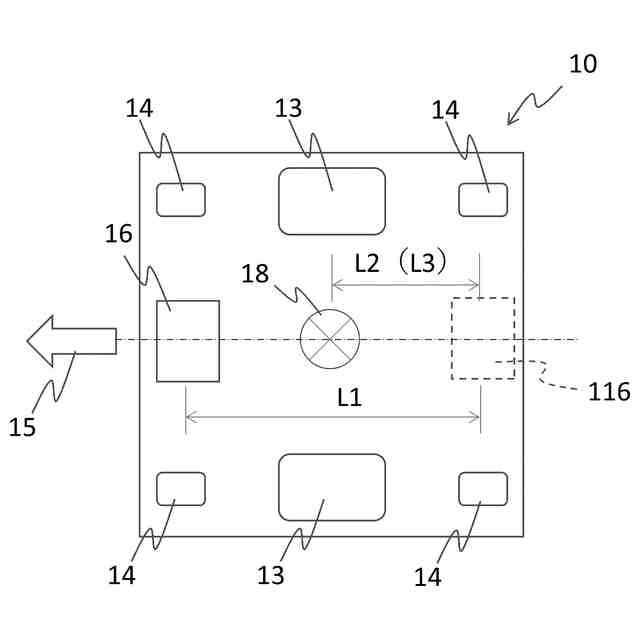
【選択図】図1
特許請求の範囲
【請求項1】
現実又は仮想のガイドラインに沿って移動可能な搬送車の走行制御システムであって、
前記搬送車の駆動部を制御することにより該搬送車の動作を制御する制御部と、
前記搬送車における特定箇所の現在の前記ガイドラインに対する相対的な位置情報及び前記ガイドラインに対する前記搬送車の姿勢情報を取得する位置姿勢取得部と、
前記搬送車の前記特定箇所と異なる位置に設定された仮想検出部の、前記特定箇所に対する相対的な位置情報を予め記憶する記憶部と、を備え、
前記制御部は、
前記搬送車の前記ガイドラインに対する位置情報及び姿勢情報と、前記仮想検出部の前記特定箇所に対する相対的な位置情報とに基づいて、前記ガイドラインに対する前記仮想検出部のガイドライン相対位置を推定し、推定した前記仮想検出部のガイドライン相対位置に基づいて、前記搬送車の動作を制御する、走行制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、
前記ガイドラインに対する前記仮想検出部のガイドライン相対位置を推定するに際して、前記ガイドラインの位置と、前記仮想検出部の位置との相対的な差分を取得する、請求項1に記載の走行制御システム。
【請求項3】
前記搬送車は、前記特定箇所に配置され現実のガイドラインを検出するガイド検出部を備え、
前記位置姿勢取得部は、前記ガイド検出部の検出情報に基づいて前記搬送車における特定箇所の現在の前記ガイドラインに対する相対的な位置情報及び前記ガイドラインに対する前記搬送車の姿勢情報を推定する、請求項1に記載の走行制御システム。
【請求項4】
前記記憶部には、現実空間に対応するマップデータと、該マップデータ上に設定される仮想のガイドラインの位置データとが予め記憶され、
前記位置姿勢取得部は、前記マップデータ上での仮想のガイドラインの位置データと、前記搬送車の現在の位置情報及び姿勢情報に基づいて、前記搬送車における特定箇所の現在の前記ガイドラインに対する相対的な位置情報及び前記ガイドラインに対する前記搬送車の姿勢情報を推定する、請求項1に記載の走行制御システム。
【請求項5】
前記仮想検出部は、前記特定箇所よりも前記搬送車の後側の位置に設定される、請求項1に記載の走行制御システム。
【請求項6】
前記制御部は、前記搬送車が後退する際に、前記仮想検出部が前記ガイドライン上に位置するか否かを判定し、
前記仮想検出部が前記ガイドライン上に位置する場合には、前記仮想検出部が前記ガイドラインに沿って移動するように前記搬送車の動作を制御し、
前記仮想検出部が前記ガイドライン上に位置していない場合には、前記仮想検出部が前記ガイドラインに近づくように前記搬送車の動作を制御する、請求項1に記載の走行制御システム。
【請求項7】
前記駆動部は、左右一対の駆動輪を有する、請求項1に記載の走行制御システム。
【請求項8】
前記特定箇所は、前記左右一対の駆動輪よりも前側に位置する、請求項7に記載の走行制御システム。
【請求項9】
前記仮想検出部は、前記左右一対の駆動輪よりも後側に位置する、請求項7に記載の走行制御システム。
【請求項10】
前記制御部は、予め定められる一定期間ごとに、前記前記ガイドラインに対する前記仮想検出部の位置を推定する、請求項1に記載の走行制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送車の走行制御システム及び搬送車の走行制御方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、各種製品の製造工場や倉庫内などの施設内における荷物の搬送に自律走行可能な無人搬送車を活用することが実用化されている。例えば、特許文献1には、ガイドラインに沿って走行する搬送車の技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2002-297239号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術では、搬送車がガイドラインに沿って走行するに際して、搬送車の前側と後側にガイドラインを検出するためのセンサが設けられている。しかしながら、搬送車の小型化等の観点から、センサの数を減らすことが望ましい。
【0005】
そこで、本開示は上記の問題点に鑑みてなされたものであり、その目的は、搬送車のガイドライン検出センサの数を減らすことが可能となる搬送車の走行制御システム及び搬送車の走行制御方法を提供することである。
【課題を解決するための手段】
【0006】
本開示によれば、現実又は仮想のガイドラインに沿って移動可能な搬送車の走行制御システムであって、
前記搬送車の駆動部を制御することにより該搬送車の動作を制御する制御部と、
前記搬送車における特定箇所の現在の前記ガイドラインに対する相対的な位置情報及び前記ガイドラインに対する前記搬送車の姿勢情報を取得する位置姿勢取得部と、
前記搬送車の前記特定箇所と異なる位置に設定された仮想検出部の、前記特定箇所に対する相対的な位置情報を予め記憶する記憶部と、を備え、
前記制御部は、
前記搬送車の前記ガイドラインに対する位置情報及び姿勢情報と、前記仮想検出部の前記特定箇所に対する相対的な位置情報とに基づいて、前記ガイドラインに対する前記仮想検出部のガイドライン相対位置を推定し、推定した前記仮想検出部のガイドライン相対位置に基づいて、前記搬送車の動作を制御する、走行制御システムが提供される。
【0007】
本開示によれば、走行制御システムにより、現実又は仮想のガイドラインに沿って移動可能な搬送車の走行を制御する走行制御方法であって、
前記走行制御システムが、
前記搬送車の駆動部を制御することにより該搬送車の動作を制御する制御部と、
前記搬送車における特定箇所の現在の前記ガイドラインに対する相対的な位置情報及び前記ガイドラインに対する前記搬送車の姿勢情報を取得する位置姿勢取得部と、
前記搬送車の前記特定箇所と異なる位置に設定された仮想検出部の、前記特定箇所に対する相対的な位置情報を予め記憶する記憶部と、を備え、
前記制御部は、
前記搬送車の前記ガイドラインに対する位置情報及び姿勢情報と、前記仮想検出部の前記特定箇所に対する相対的な位置情報とに基づいて、前記ガイドラインに対する前記仮想検出部のガイドライン相対位置を推定し、推定した前記仮想検出部のガイドライン相対位置に基づいて、前記搬送車の動作を制御する、走行制御方法が提供される。
【発明の効果】
【0008】
本開示によれば、搬送車のガイドライン検出センサの数を減らすことが可能となる搬送車の走行制御システム及び搬送車の走行制御方法を提供することができる。
【図面の簡単な説明】
【0009】
本実施形態に係る搬送車及びガイドラインの一例を示す平面図である。
本実施形態に係る搬送車のハードウェア構成例を示す平面図である。
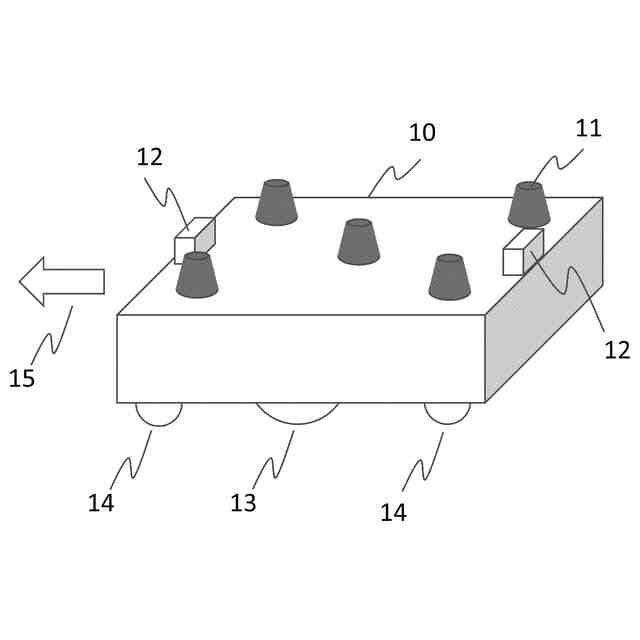
本実施形態に係る搬送車のハードウェア構成の一例を示す斜視図である。
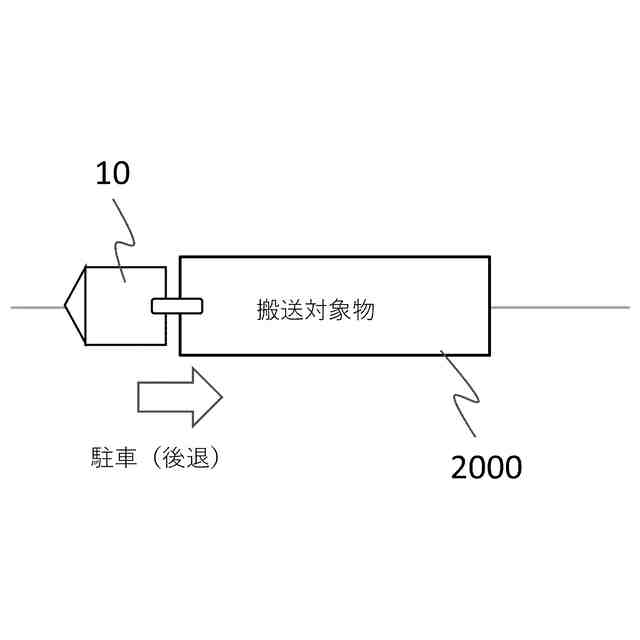
本実施形態に係る搬送車がガイドラインに沿って後退する場面の一例を示す図である。
本実施形態に係る搬送車がガイドラインに沿って後退する場面の他の例を示す図である。
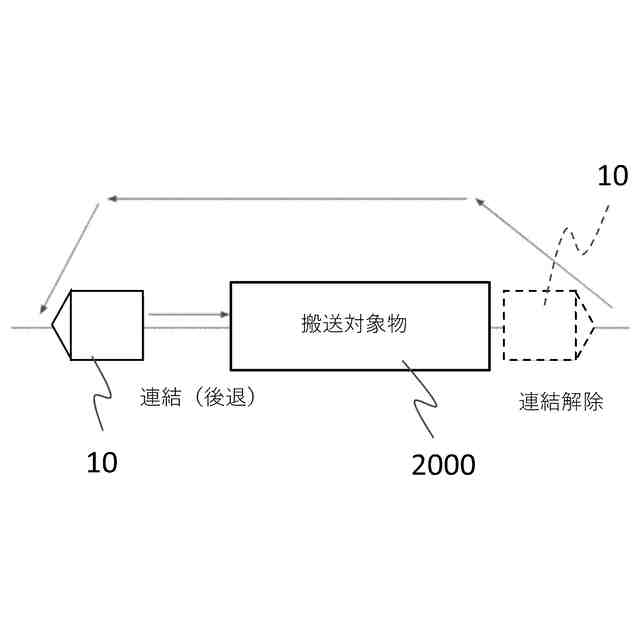
本実施形態に係る搬送車及び搬送対象物とガイドラインの位置関係を示す図である。
本実施形態に係る搬送車及び搬送対象物がガイドラインに近づくように後退制御する例を示す図である。
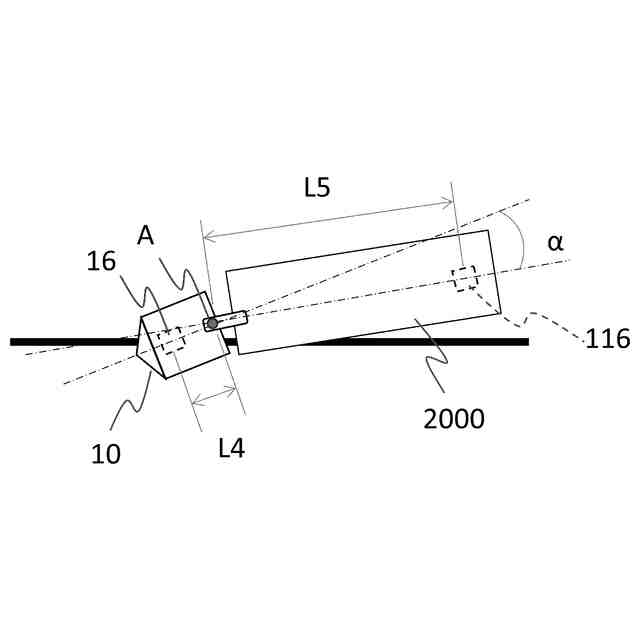
本実施形態に係る搬送車と牽引台車が結合された際のハードウェア構成の一例を示す図である。
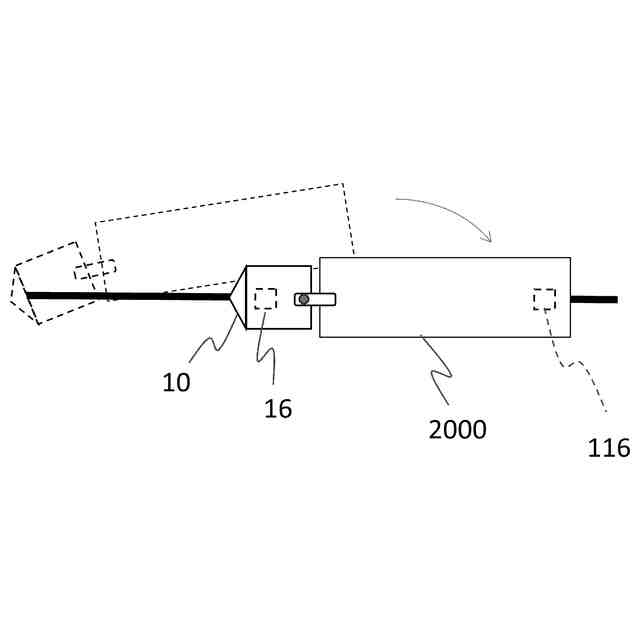
本実施形態に係る搬送車と牽引台車が結合された際のハードウェア構成の他の一例を示す図である。
本実施形態に係る動作エリアの構成例を示す図である。
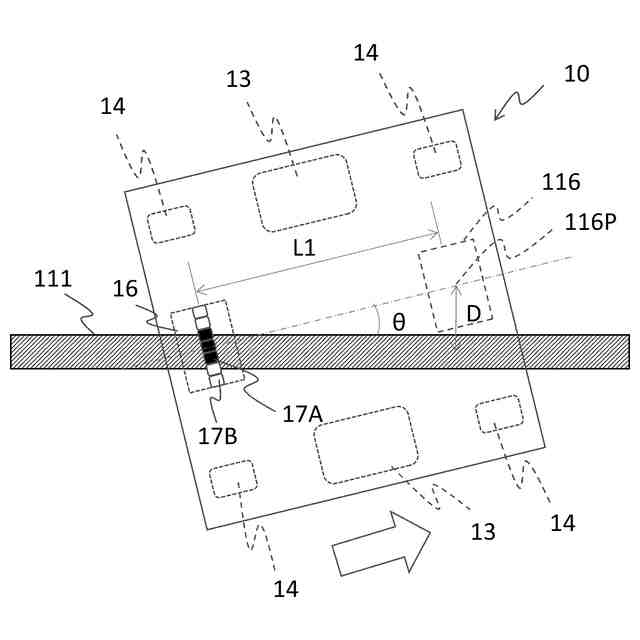
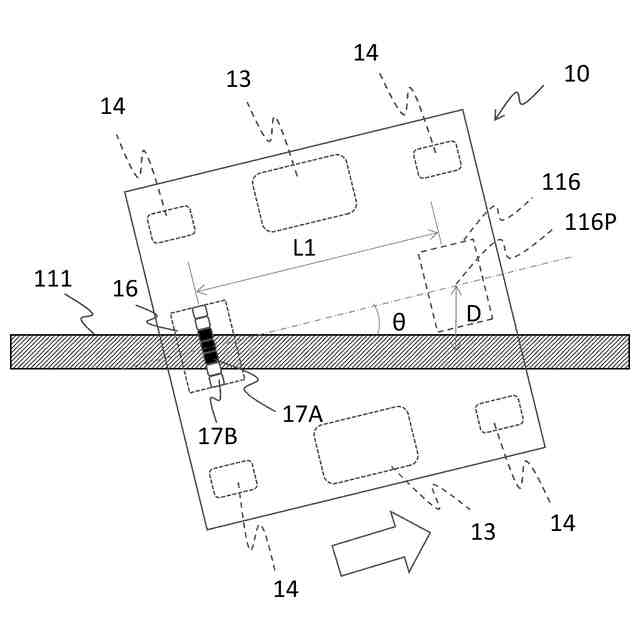
誘導ライン検出部により誘導ラインを構成する二次元コードを検知した際の誘導ラインと搬送車の位置関係を示す図である。
誘導ライン検出部により誘導ラインを構成する磁気テープを検知した際の誘導ラインと搬送車の位置関係を示す下面図である。
誘導ラインと搬送車の仮想検出部の位置関係を示す下面図である。
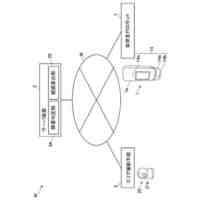
本実施形態に係る搬送システムの全体構成図の一例を示す図である。
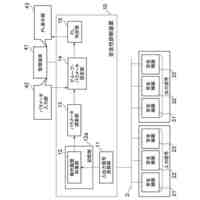
本実施形態における統括制御装置の構成図である。
本実施形態に係る搬送車の機能構成図を示す図である。
本実施形態における制御システムの制御フローを示す図である。
【発明を実施するための形態】
【0010】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
3か月前
株式会社カネカ
製造システム
24日前
株式会社ダイヘン
移動体
3か月前
オムロン株式会社
スレーブ装置
今日
愛知製鋼株式会社
車両用システム
1か月前
株式会社FUJI
加工機械ライン
2か月前
ローム株式会社
基準電圧源
21日前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
10日前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
28日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社オプトン
制御プログラム生成装置
3か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社鷺宮製作所
制御装置
3か月前
キヤノン株式会社
配送システム
24日前
株式会社ダイフク
物品搬送設備
3か月前
トヨタ自動車株式会社
クラッチペダル
1か月前
マーク ヘイリー
消防ロボット
2か月前
トヨタ自動車株式会社
制御装置
今日
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイヘン
負荷時タップ切換器
3か月前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
10日前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
株式会社CAOS
移動体の制御システム
20日前
株式会社テイエルブイ
減圧弁の制御装置
2か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
株式会社TMEIC
安全性診断装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ