TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025139491
公報種別
公開特許公報(A)
公開日
2025-09-26
出願番号
2024038456
出願日
2024-03-12
発明の名称
車両制御装置及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/12 20200101AFI20250918BHJP(車両一般)
要約
【課題】対象物の存在を含んだ車線逸脱抑制制御を実行可能とすること。
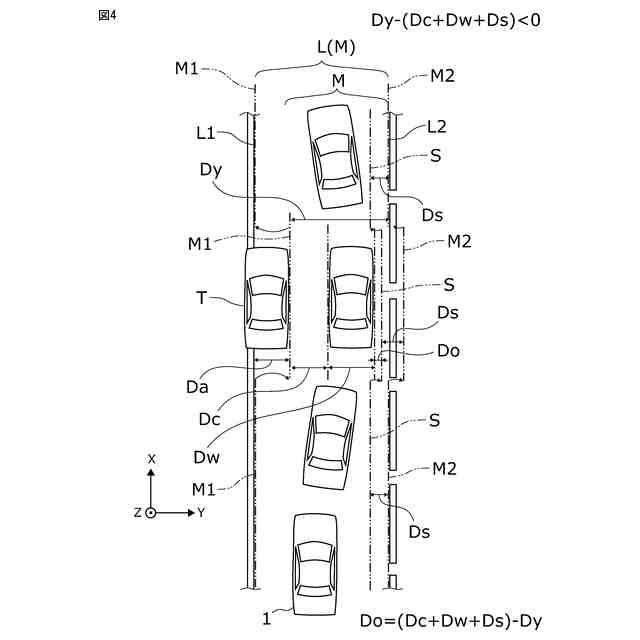
【解決手段】車両1が車線Lから逸脱することを抑制する車線逸脱抑制制御を実行する制御部11を備え、制御部は、車両の周囲の環境を検出する検出値に基づいて、第1境界L1と第2境界L2との間の車線Lを認識し、車線内を走行するように車線逸脱抑制制御を実行し、第1境界において車線内に存在する対象物Tを認識した場合、対象物の車線の内側の側面の位置に第1仮想境界M1を設定し、第1仮想境界と第2境界との間の距離である第1幅に応じて、車線の内側方向に所定距離離間した位置に前記車線逸脱抑制制御の開始位置が設定される第2仮想境界M2を設定し、第1仮想境界と第2仮想境界との間に設定された仮想車線内Mにおいて、前記対象物から離間したクリアランス距離を確保し、前記対象物を回避して走行する際に車線逸脱抑制制御を実行する、車両制御装置10である。
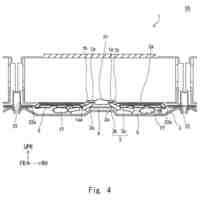
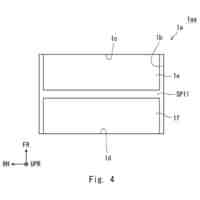
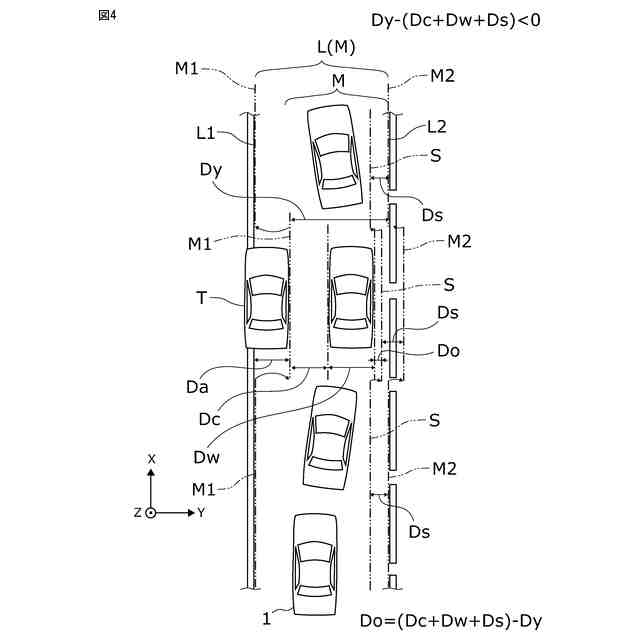
【選択図】図4
特許請求の範囲
【請求項1】
車両が車線から逸脱することを抑制する車線逸脱抑制制御を実行する制御部を備え、
前記制御部は、
前記車両の周囲の環境を検出する検出値に基づいて、第1境界と第2境界との間の前記車線を認識し、
前記車線内を走行するように前記車線逸脱抑制制御を実行し、
前記第1境界において前記車線内に存在する対象物を認識した場合、前記対象物の前記車線内側の側面の位置に第1仮想境界を設定し、
前記第1仮想境界と前記第2境界との間の距離である第1幅に応じて、前記車線の内側方向に所定距離離間した位置に前記車線逸脱抑制制御の開始位置が設定される第2仮想境界を設定し、
前記第1仮想境界と前記第2仮想境界との間に設定された仮想車線内において、前記対象物から離間したクリアランス距離を確保し、前記対象物を回避して走行する際に前記車線逸脱抑制制御を実行する、
車両制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、
前記車線の車線方向と直交する車線横断方向における横移動速度に応じて前記開始位置と前記第2仮想境界との間の距離を設定する、
請求項1に記載の車両制御装置。
【請求項3】
前記制御部は、
前記クリアランス距離を確保し、前記対象物を回避する際に、前記車両が前記開始位置を跨ぐと判定した場合、
前記クリアランス距離、前記車両の車幅、及び、前記開始位置と前記第2仮想境界との間の距離を加算した第2幅から、前記第1幅を引いた差分値をオフセット量として設定し、
前記第2境界から前記車線外に前記オフセット量の距離にオフセットした位置に前記第2仮想境界を移動し、
移動後の前記第2仮想境界に基づいて前記開始位置を移動する、
請求項1に記載の車両制御装置。
【請求項4】
前記制御部は、
前記クリアランス距離を前記車両の速度に応じて設定する、
請求項1に記載の車両制御装置。
【請求項5】
前記制御部は、
前記仮想車線において前記車両が前記開始位置を跨いだ場合、報知部から所定の報知を出力させる、
請求項1に記載の車両制御装置。
【請求項6】
前記制御部は、
前記仮想車線において前記車両が前記開始位置を跨いだ場合、操舵部を制御して前記車両が前記仮想車線から逸脱することを抑制する、
請求項1に記載の車両制御装置。
【請求項7】
車両が走行中の車線から逸脱することを抑制する車線逸脱抑制制御を実行する車両制御装置にインストールされたプログラムであって、
前記車両の周囲の環境を検出する検出値に基づいて、第1境界と第2境界との間の前記車線を認識し、
前記車線内を走行するように前記車線逸脱抑制制御を実行し、
前記第1境界において前記車線内に存在する対象物を認識した場合、前記対象物の前記車線内側の側面の位置に第1仮想境界を設定し、
前記第1仮想境界と前記第2境界との間の距離である第1幅に応じて、前記車線の内側方向に所定距離離間した前記車線逸脱抑制制御の開始位置が設定される第2仮想境界を設定し、
前記第1仮想境界と前記第2仮想境界との間に設定された仮想車線内において、前記対象物から離間したクリアランス距離を確保し、前記対象物を回避して走行する際に前記車線逸脱抑制制御を実行する、処理をコンピュータに実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転支援を実行する車両制御装置及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、車線内を走行中の車両が車線から逸脱することを抑制する車線逸脱抑制制御機能が車両に搭載されている。車線逸脱抑制制御は、車両が車線の境界に接近した際に、ユーザに所定の警報を出力すると共に、車両を車線内に保持するように操舵装置を制御するものである。例えば、特許文献1には、車線が認識可能である場合には、車線を基準に車線逸脱抑制制御を実行し、車線が認識不能である場合には、仮想車線を設定し、仮想車線を基準に車線逸脱抑制制御を実行する運転支援装置が記載されている。特許文献1に記載された運転支援装置は、道路幅を検出する検出部と、道路幅に基づいて仮想車線を設定し、仮想車線に基づいて車線逸脱抑制制御を実行する制御部とを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2012-128748号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された運転支援装置によれば、仮想車線内に車両等の対象物が存在している場合に、対象物を回避する際に、車両が仮想車線の境界に接近する場合があり、車線逸脱抑制制御が実行される。従って、特許文献1に記載された運転支援装置によれば、対象物を回避する際に、車線逸脱抑制制御が頻繁に実行されることでユーザに煩わしさを感じさせる可能性がある。
【0005】
本発明は、対象物の存在を含んだ車線逸脱抑制制御を実行可能な車両制御装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様は、車両が車線から逸脱することを抑制する車線逸脱抑制制御を実行する制御部を備え、前記制御部は、前記車両の周囲の環境を検出する検出値に基づいて、第1境界と第2境界との間の前記車線を認識し、前記車線内を走行するように前記車線逸脱抑制制御を実行し、前記第1境界において前記車線内に存在する対象物を認識した場合、前記対象物の前記車線の内側の側面の位置に第1仮想境界を設定し、前記第1仮想境界と前記第2境界との間の距離である第1幅に応じて、前記車線の内側方向に所定距離離間した位置に前記車線逸脱抑制制御の開始位置が設定される第2仮想境界を設定し、前記第1仮想境界と前記第2仮想境界との間に設定された仮想車線内において、前記対象物から離間したクリアランス距離を確保し、前記対象物を回避して走行する際に前記車線逸脱抑制制御を実行する、車両制御装置である。
【発明の効果】
【0007】
本発明によれば、対象物の存在を含んだ車線逸脱抑制制御を実行することができる。
【図面の簡単な説明】
【0008】
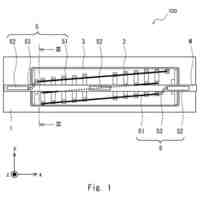
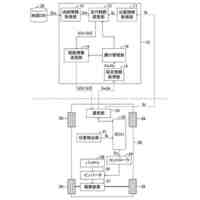
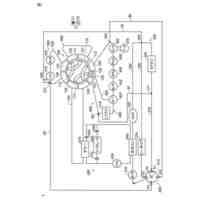
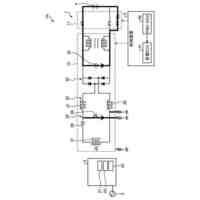
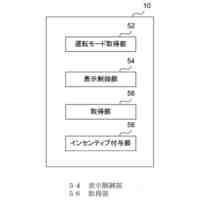
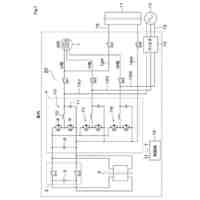
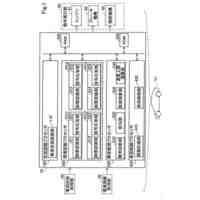
実施形態に係る車両制御装置の構成を示すブロック図である。
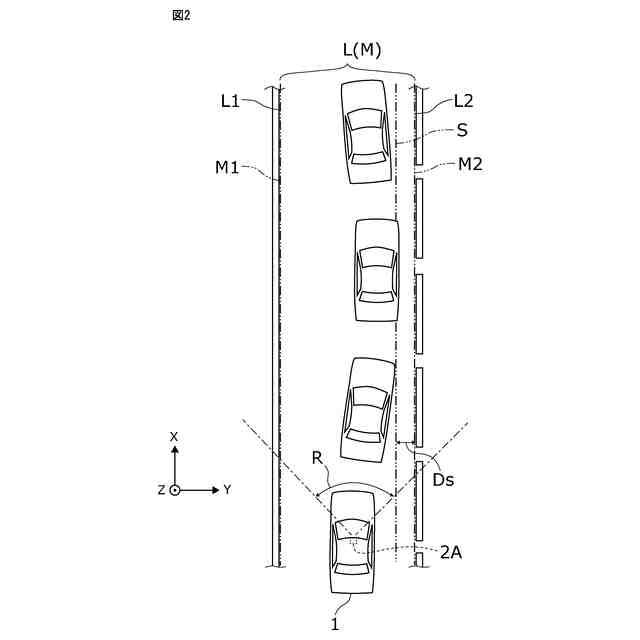
通常モードの車線逸脱抑制制御を説明する図である。
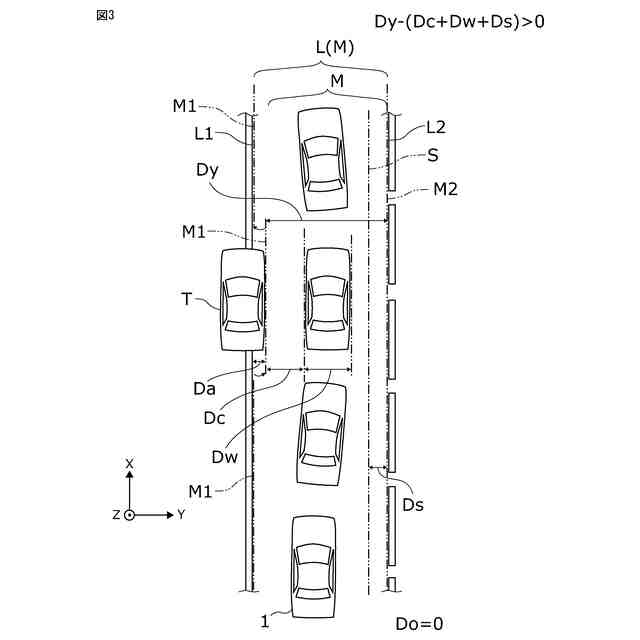
対象物回避モードの車線逸脱抑制制御を説明する図である。
対象物回避モードの車線逸脱抑制制御を説明する図である。
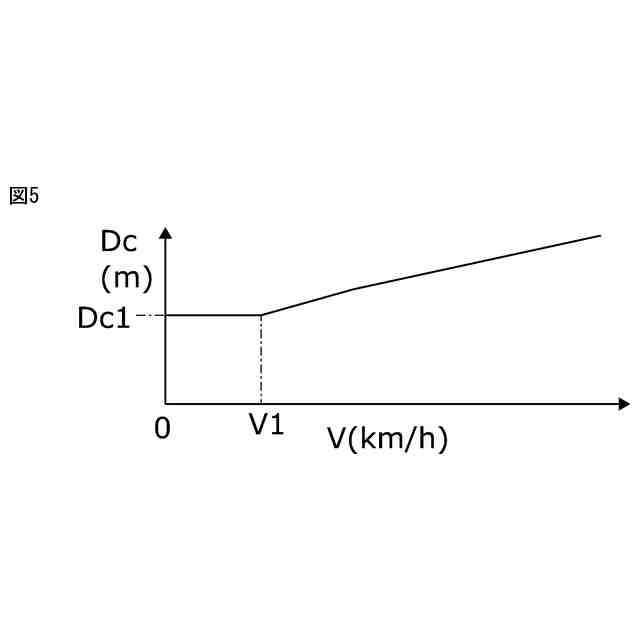
クリアランス距離の設定方法を示す図である。
車線逸脱抑制制御の開始位置の所定距離の設定方法を示す図である。
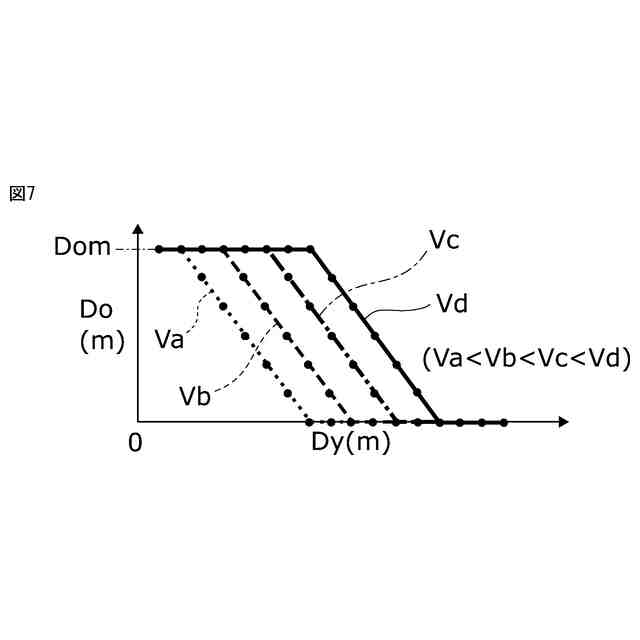
オフセット量の設定方法を示す図である。
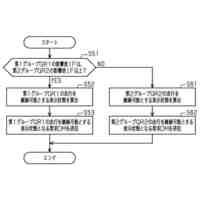
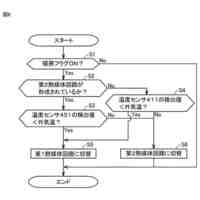
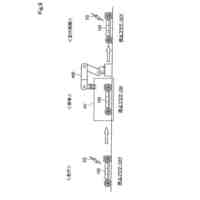
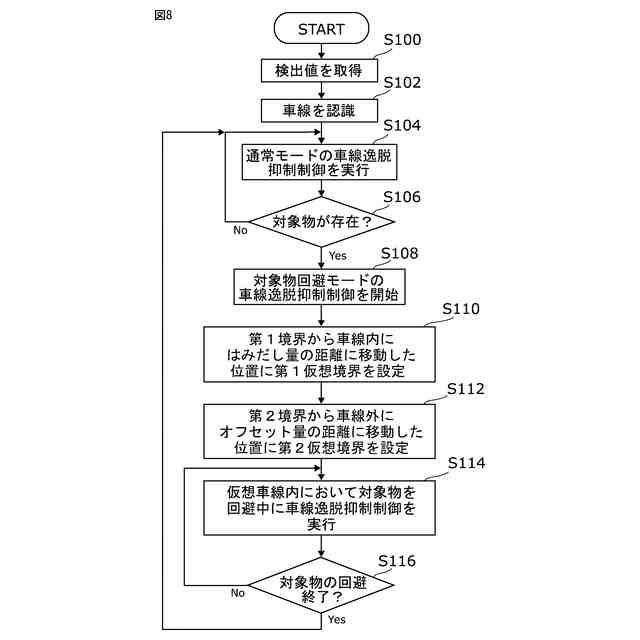
車線逸脱抑制制御方法の処理の流れを示すフローチャートである。
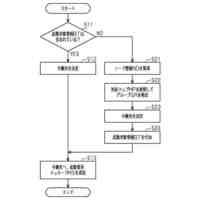
通常モードの車線逸脱抑制制御の処理の流れを示すフローチャートである。
対象物回避モードの処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
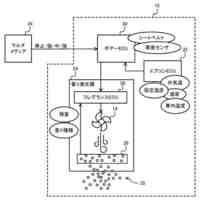
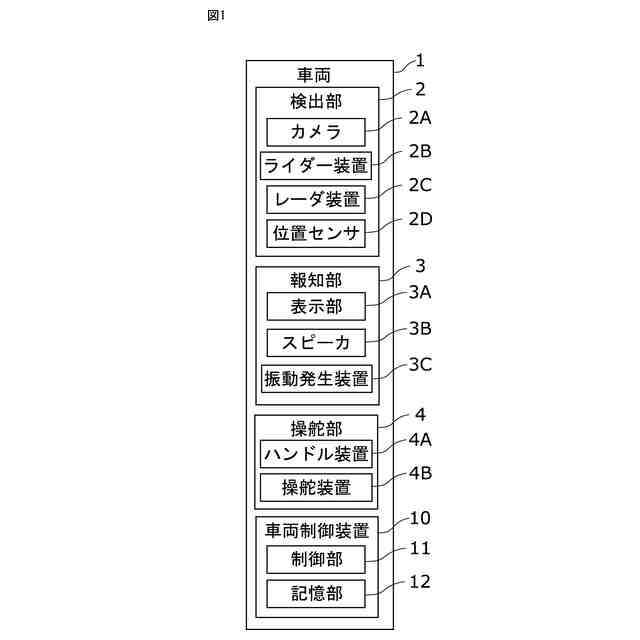
図1に示されるように、車両1は、運転支援を実行する車両制御装置10を備えている。車両1は、運転支援のために必要な検出を行う検出部2を備えている。検出部2は、例えば、車両1の周囲の環境を検出し、検出値を出力するように構成されている。検出部2は、例えば、カメラ2Aにより構成されている。カメラ2Aは、例えば、車両1の進行方向に向かって撮像し、撮像データを車両制御装置10に出力する。検出部2は、車両1の周囲の環境を撮像するように、1つ以上のカメラ2Aにより構成されていてもよい。
【0010】
検出部2は、カメラ2Aだけでなく、車両1の周囲の物体を検出するライダー装置2Bやレーダ装置2Cが設けられていてもよい。ライダー装置2Bは、レーザ光を走査し、反射光を計測することにより車両1の周囲の物体の3次元データを取得する。レーダ装置2Cは、レーダ波を照射し、反射波を計測することにより車両1の周囲に存在する物体を検出する。検出部2は、車両1の現在位置を計測する位置センサ2Dが設けられていてもよい。位置センサ2Dは、例えば、GPS(Global Positioning System)センサ等により構成されている。位置センサ2Dは、例えば、ナビゲーション装置に用いられる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
サーバ
2日前
トヨタ自動車株式会社
冷却構造
1日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
運行管理装置
1日前
トヨタ自動車株式会社
運行管理装置
1日前
トヨタ自動車株式会社
香り制御装置
2日前
トヨタ自動車株式会社
セルスタック
1日前
トヨタ自動車株式会社
運転支援装置
1日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
電極の製造方法
2日前
トヨタ自動車株式会社
電極の製造方法
2日前
トヨタ自動車株式会社
熱管理システム
2日前
トヨタ自動車株式会社
非接触充電装置
2日前
トヨタ自動車株式会社
熱管理システム
2日前
トヨタ自動車株式会社
車両走行管理装置
1日前
トヨタ自動車株式会社
燃料電池システム
1日前
トヨタ自動車株式会社
ゲートウェイ装置
1日前
トヨタ自動車株式会社
車両用表示制御装置
1日前
トヨタ自動車株式会社
蓄電装置および車両
1日前
トヨタ自動車株式会社
燃料電池車の冷却装置
1日前
トヨタ自動車株式会社
ガスタンクの交換方法
1日前
トヨタ自動車株式会社
パワーユニット搭載構造
2日前
トヨタ自動車株式会社
水素タンクのマウント構造
1日前
トヨタ自動車株式会社
車両制御装置及びプログラム
1日前
トヨタ自動車株式会社
浮体側ユニットの転覆復帰装置
2日前
トヨタ自動車株式会社
ストレージタンク受渡システム
2日前
市光工業株式会社
車両用灯具
2日前
トヨタ自動車株式会社
製造方法及びMaaS提供方法
1日前
株式会社デンソー
電力変換装置
2日前
トヨタ自動車株式会社
燃料電池用セパレータの製造方法
1日前
トヨタ自動車株式会社
情報処理装置および情報処理方法
2日前
トヨタ自動車株式会社
サーバ装置、車両および制御方法
1日前
株式会社デンソー
制御システム
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ