TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141299
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041173
出願日
2024-03-15
発明の名称
運行管理システム、管理装置、方法、及びプログラム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G05D
1/69 20240101AFI20250919BHJP(制御;調整)
要約
【課題】動作レスポンスとマルチエージェント制御の最適性とを両立可能な、複数の移動機の制御方式を提供する。
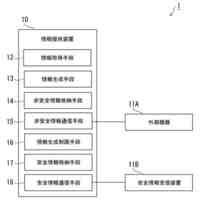
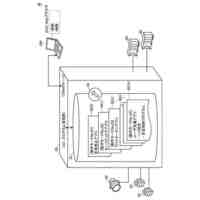
【解決手段】管理装置10では、移動路又はオープンスペースである複数の領域の各々が、隣接する2つの領域の境界に存在し、2つの領域に共有される経由点で接続され、1つの領域が有する2つの経由点の組み合わせ毎の所要時間及び容量を保持し、かつオープンスペースの境界上の経由点に接続される領域が最大1つであるグラフマップ52を参照し、策定部54が、各移動機30の運行計画又は運行計画に基づく動作指示を策定し、配布部56が、運行計画又は動作指示を各移動機30に配布すると共に、オープンスペース内の経路計画を対応する移動機30に委任する。移動機30では、生成部64が、委任されたオープンスペース内の経路計画を生成し、制御部66が、運行計画又は動作指示及び経路計画に基づいて、自機の動作を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
複数の移動機の各々の運行を管理する管理装置と、前記複数の移動機とを含む運行管理システムであって、
前記管理装置は、
移動機の進行方向が一意に定義される移動路又は移動機の進行方向が一意に定義されないオープンスペースである複数の領域の各々が、隣接する2つの領域の境界に存在し、前記2つの領域に共有される経由点で接続されたマップであって、1つの領域が有する2つの経由点の組み合わせ毎に、前記2つの経由点間を移動するための所要時間、及び前記複数の領域の各々に同時に進入可能な移動機の上限数を保持し、かつ前記オープンスペースの境界上の経由点に接続される領域が最大1つであるマップが記憶された記憶部と、
複数の移動機の各々について、前記マップが保持する前記所要時間及び前記上限数に基づいて、各経由点の通過時刻及び通過する領域を含む運行計画又は前記運行計画に基づく動作指示を策定する策定部と、
前記策定部で策定された運行計画又は前記運行計画に基づく動作指示を前記複数の移動機の各々に配布すると共に、前記オープンスペース内の経路計画を対応する前記移動機に委任する配布部と、を含み、
前記移動機は、
前記配布部から委任されたオープンスペース内の経路計画を生成する生成部と、
前記配布部から配布された運行計画又は前記運行計画に基づく動作指示、及び前記生成部で生成された経路計画に基づいて、自機の動作を制御する制御部と、を含む、
運行管理システム。
続きを表示(約 1,700 文字)
【請求項2】
前記移動路は、両端に経由点を持つ領域である請求項1に記載の運行管理システム。
【請求項3】
前記オープンスペースは、内部にゴールとなる経由点を含む請求項1又は請求項2に記載の運行管理システム。
【請求項4】
前記策定部は、前記移動路と前記オープンスペースとを交互に進行するように運行計画又は前記運行計画に基づく動作指示を策定する請求項1又は請求項2に記載の運行管理システム。
【請求項5】
前記策定部は、前記移動機が前記領域に進入する経由点と同一の経由点から前記領域を退出することを許可する請求項1又は請求項2に記載の運行管理システム。
【請求項6】
前記移動機は、自機の状態に基づいて、前記策定部が策定した運行計画における次の経由点を通過する予測通過時刻を予測し、予測した前記予測通過時刻を前記管理装置へ通知する通知部を含み、
前記管理装置は、前記次の経由点について、前記通知部から通知された前記予測通過時刻と前記運行計画における通過時刻との差異に基づいて、前記運行計画における各経由点の通過時刻を修正する修正部を含み、
前記配布部は、前記修正部により修正された運行計画若しくは前記修正された運行計画に基づく動作指示、又は、前記策定部により再策定された運行計画若しくは前記再策定された運行計画に基づく動作指示を前記複数の移動機の各々に配布する
請求項1又は請求項2に記載の運行管理システム。
【請求項7】
前記オープンスペースは、内部にさらに中間オープンスペースを含み、
前記運行管理システムは、さらに複数の中間管理装置を含み、
前記配布部は、前記策定部で策定された運行計画を前記複数の中間管理装置の各々に配布すると共に、前記オープンスペース内の運行計画を対応する前記中間管理装置に委任し、
前記中間管理装置は、
複数の移動機の各々について、前記配布部から委任されたオープンスペース内に対応する前記マップの前記所要時間及び前記上限数に基づいて、各経由点の通過時刻及び通過する領域を含む運行計画又は前記運行計画に基づく動作指示を策定する中間策定部と、
前記中間策定部で策定された運行計画又は前記運行計画に基づく動作指示を前記複数の移動機の各々に配布すると共に、前記中間オープンスペース内の経路計画を対応する前記移動機に委任する中間配布部と、を含む、
請求項1又は請求項2に記載の運行管理システム。
【請求項8】
前記移動機は、自機の状態に基づいて、前記中間策定部が策定した運行計画における次の経由点を通過する予測通過時刻を予測し、予測した前記予測通過時刻を前記中間管理装置へ通知する通知部を含み、
前記中間管理装置は、前記移動機から通知された前記予測通過時刻に基づいて、前記策定部が策定した運行計画における次の経由点を通過する予測通過時刻を予測し、予測した前記予測通過時刻を前記管理装置へ通知する中間通知部を含み、
前記管理装置は、前記次の経由点について、前記中間通知部から通知された前記予測通過時刻と前記運行計画における各経由点の通過時刻との差異に基づいて、前記運行計画を修正する修正部を含み、
前記配布部は、前記修正部により修正された運行計画、又は、前記策定部により再策定された運行計画を前記複数の中間管理装置の各々に配布する
請求項7に記載の運行管理システム。
【請求項9】
前記中間管理装置は、前記配布部から配布された運行計画における経由点の通過時刻の補正量を、前記中間策定部で策定された運行計画に含まれる各経由点に配分する中間修正部を含む請求項8に記載の運行管理システム。
【請求項10】
前記中間修正部は、運行計画の修正が、移動機の移動を急がせるのか遅らせるのかに応じて前記運行計画に含まれる経由点毎に設定されるリスクと、修正後の運行計画に従って移動する移動機の消費電力の見積もりとに基づいて、各経由点に配分する補正量を決定する請求項9に記載の運行管理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、運行管理システム、管理装置、管理方法、及び管理プログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来、移動体を移動させる計画を少ない計算量で生成する情報処理装置が提案されている。この情報処理装置は、複数の移動路と複数の移動路間を結合する複数の基準領域とを含み、複数のエリアに分割したエリアに含まれる基準領域のうちエリアを代表する代表領域は移動路を介して他のエリアの代表領域と結合された移動ネットワークにおいて、第1移動体に対し第1基準領域への移動を指示する移動指令情報に基づき、第1移動体を通過させる代表領域の順序と代表領域を通過するタイミングとを定めた第1計画を生成する第1計画部と、第1移動体の移動状況に応じて、第1計画で定められた代表領域から第1代表領域を選択し、第1代表領域を含む第1エリア内で第1移動体を移動させる第1経路と第1経路に含まれる基準領域を第1移動体が通過するタイミングとを定めた第2計画を生成する第2計画部とを備える(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-047944号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
複数の移動機を制御する方式としては、移動機の全ての動作を中央サーバにおいて集中管理する集中制御方式がある。集中制御方式では、中央サーバと複数の移動機の各々との間で通信を行うため動作レスポンスは遅くなるが、マルチエージェント制御の最適性は高い。
【0005】
また、複数の移動機を制御する方式としては、複数の移動機の全ての動作を移動機自身で自律的に行わせ、中央サーバとの通信は最小限(理想的には通信なし)とする分散制御方式がある。分散制御方式では、中央サーバと複数の移動機の各々との通信は最小限となるため、動作レスポンスは早いが、マルチエージェント制御の最適性は低い。
【0006】
本開示は、上記の点に鑑みてなされたものであり、動作レスポンスとマルチエージェント制御の最適性とを両立可能な、複数の移動機の制御方式を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る運行管理システムは、複数の移動機の各々の運行を管理する管理装置と、前記複数の移動機とを含む運行管理システムであって、前記管理装置は、移動機の進行方向が一意に定義される移動路又は移動機の進行方向が一意に定義されないオープンスペースである複数の領域の各々が、隣接する2つの領域の境界に存在し、前記2つの領域に共有される経由点で接続されたマップであって、1つの領域が有する2つの経由点の組み合わせ毎に、前記2つの経由点間を移動するための所要時間、及び前記複数の領域の各々に同時に進入可能な移動機の上限数を保持し、かつ前記オープンスペースの境界上の経由点に接続される領域が最大1つであるマップが記憶された記憶部と、複数の移動機の各々について、前記マップが保持する前記所要時間及び前記上限数に基づいて、各経由点の通過時刻及び通過する領域を含む運行計画又は前記運行計画に基づく動作指示を策定する策定部と、前記策定部で策定された運行計画又は前記運行計画に基づく動作指示を前記複数の移動機の各々に配布すると共に、前記オープンスペース内の経路計画を対応する前記移動機に委任する配布部と、を含み、前記移動機は、前記配布部から委任されたオープンスペース内の経路計画を生成する生成部と、前記配布部から配布された運行計画又は前記運行計画に基づく動作指示、及び前記生成部で生成された経路計画に基づいて、自機の動作を制御する制御部と、を含む。
【0008】
本開示に係る管理装置は、移動機の進行方向が一意に定義される移動路又は移動機の進行方向が一意に定義されないオープンスペースである複数の領域の各々が、隣接する2つの領域の境界に存在し、前記2つの領域に共有される経由点で接続されたマップであって、1つの領域が有する2つの経由点の組み合わせ毎に、前記2つの経由点間を移動するための所要時間、及び前記複数の領域の各々に同時に進入可能な移動機の上限数を保持し、かつ前記オープンスペースの境界上の経由点に接続される領域が最大1つであるマップが記憶された記憶部と、複数の移動機の各々について、前記マップが保持する前記所要時間及び前記上限数に基づいて、各経由点の通過時刻及び通過する領域を含む運行計画又は前記運行計画に基づく動作指示を策定する策定部と、前記策定部で策定された運行計画又は前記運行計画に基づく動作指示を前記複数の移動機の各々に配布すると共に、前記オープンスペース内の経路計画を対応する前記移動機に委任する配布部と、を含む。
【0009】
本開示に係る管理方法は、移動機の進行方向が一意に定義される移動路又は移動機の進行方向が一意に定義されないオープンスペースである複数の領域の各々が、隣接する2つの領域の境界に存在し、前記2つの領域に共有される経由点で接続されたマップであって、1つの領域が有する2つの経由点の組み合わせ毎に、前記2つの経由点間を移動するための所要時間、及び前記複数の領域の各々に同時に進入可能な移動機の上限数を保持し、かつ前記オープンスペースの境界上の経由点に接続される領域が最大1つであるマップが記憶された記憶部を参照し、複数の移動機の各々について、前記マップが保持する前記所要時間及び前記上限数に基づいて、各経由点の通過時刻及び通過する領域を含む運行計画又は前記運行計画に基づく動作指示を策定し、策定した運行計画又は前記運行計画に基づく動作指示を前記複数の移動機の各々に配布すると共に、前記オープンスペース内の経路計画を対応する前記移動機に委任することを含む処理をコンピュータが実行する方法である。
【0010】
本開示に係る管理プログラムは、コンピュータを、移動機の進行方向が一意に定義される移動路又は移動機の進行方向が一意に定義されないオープンスペースである複数の領域の各々が、隣接する2つの領域の境界に存在し、前記2つの領域に共有される経由点で接続されたマップであって、1つの領域が有する2つの経由点の組み合わせ毎に、前記2つの経由点間を移動するための所要時間、及び前記複数の領域の各々に同時に進入可能な移動機の上限数を保持し、かつ前記オープンスペースの境界上の経由点に接続される領域が最大1つであるマップが記憶された記憶部を参照し、複数の移動機の各々について、前記マップが保持する前記所要時間及び前記上限数に基づいて、各経由点の通過時刻及び通過する領域を含む運行計画又は前記運行計画に基づく動作指示を策定する策定部、及び、前記策定部で策定された運行計画又は前記運行計画に基づく動作指示を前記複数の移動機の各々に配布すると共に、前記オープンスペース内の経路計画を対応する前記移動機に委任する配布部として機能させるためのプログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電源回路
7日前
オムロン株式会社
電源回路
7日前
オムロン株式会社
電源回路
7日前
オムロン株式会社
制御装置
1か月前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
情報提供装置
3日前
オムロン株式会社
スレーブ装置
3日前
オムロン株式会社
IOターミナル
3日前
オムロン株式会社
無停電電源装置
2か月前
オムロン株式会社
トリガスイッチ
3日前
オムロン株式会社
端子折り曲げ治具
3日前
オムロン株式会社
導線折り曲げ治具
1か月前
オムロン株式会社
モータの監視装置
3日前
オムロン株式会社
システムおよび方法
3日前
オムロン株式会社
セーフティデバイス
3日前
オムロン株式会社
電力開閉モジュール
3日前
オムロン株式会社
リモート安全入出力装置
3日前
オムロン株式会社
支援システム及び支援方法
3日前
オムロン株式会社
保護継電器及び電力制御装置
3日前
オムロン株式会社
パワーコンディショナシステム
3日前
オムロン株式会社
情報処理装置及び情報処理方法
13日前
オムロン株式会社
給電モジュール及び給電システム
3日前
オムロン株式会社
搬送装置、搬送方法、プログラム
1か月前
オムロン株式会社
回転制御システム及び回転制御方法
1か月前
オムロン株式会社
教育支援システム及び教育支援方法
3日前
オムロン株式会社
計測装置、計測方法及びプログラム
3日前
オムロン株式会社
電力供給システム及び電力制御装置
3日前
オムロン株式会社
トルク推定方法及びトルク推定装置
2か月前
オムロン株式会社
検査装置、検査方法およびプログラム
13日前
オムロン株式会社
画像処理システムおよび画像処理方法
1か月前
オムロン株式会社
非接触給電システム及びその制御方法
1か月前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
3日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
3日前
オムロン株式会社
安全IOターミナルおよび安全システム
3日前
オムロン株式会社
交通管制システム、および動作切替方法
3日前
オムロン株式会社
監視システム、警報方法、及びプログラム
3日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ