TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025146599
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024152511,2024538118
出願日
2024-09-04,2024-03-22
発明の名称
シミュレーション装置及びコンピュータプログラム
出願人
ファナック株式会社
代理人
個人
,
個人
主分類
G05B
19/4069 20060101AFI20250926BHJP(制御;調整)
要約
【課題】駆動軸のシミュレーションのモデルを変更して、様々な種類の駆動軸をシミュレーションできるシミュレーション装置を提供すること。
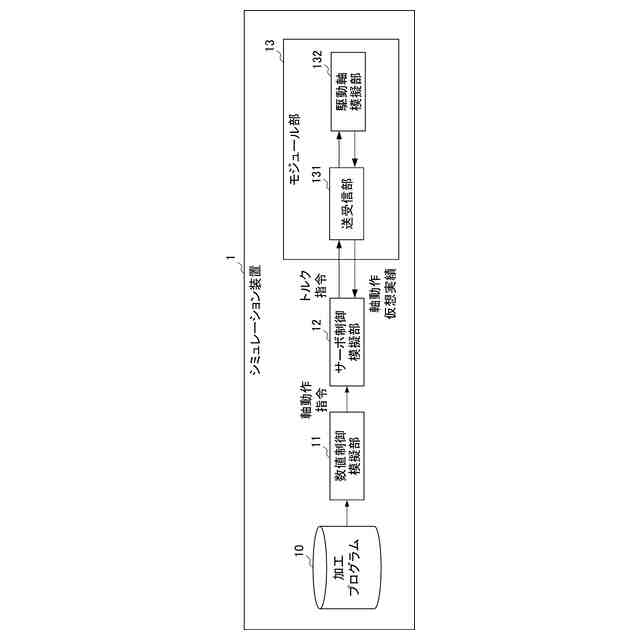
【解決手段】工作機械のシミュレーション装置であって、加工プログラムに基づいて工作機械の軸動作指令を生成する数値制御模擬部と、軸動作指令、及び工作機械の軸動作を模擬するための軸動作仮想実績に基づいてトルク指令を生成するサーボ制御模擬部と、数値制御模擬部及びサーボ制御模擬部とは独立した形態であり、交換可能なモジュール部と、を備え、モジュール部は、サーボ制御模擬部からトルク指令を受信し、サーボ制御模擬部へ軸動作仮想実績を送信する送受信部と、トルク指令に基づいて、軸動作仮想実績を更新する駆動軸模擬部と、を備え、工作機械を制御するシステムに依存しない外部装置によって生成されており、サーボ制御模擬部は、軸動作仮想実績が得られない場合、トルク指令を生成しない。
【選択図】図1
特許請求の範囲
【請求項1】
工作機械のシミュレーション装置であって、
加工プログラムに基づいて、前記工作機械の軸動作指令を生成する数値制御模擬部と、
前記軸動作指令、及び前記工作機械の軸動作を模擬するための軸動作仮想実績に基づいてトルク指令を生成するサーボ制御模擬部と、
前記数値制御模擬部及び前記サーボ制御模擬部とは独立した形態であり、交換可能なモジュール部と、を備え、
前記モジュール部は、
前記サーボ制御模擬部から前記トルク指令を受信し、前記サーボ制御模擬部へ前記軸動作仮想実績を送信する送受信部と、
前記トルク指令に基づいて、前記工作機械の駆動軸の動作をシミュレーションすると共に、前記軸動作仮想実績を更新する駆動軸模擬部と、
を備え、
前記モジュール部は、前記工作機械を制御するシステムに依存しない外部装置によって生成されており、
前記サーボ制御模擬部は、前記軸動作仮想実績が得られた場合、前記トルク指令を生成し、前記軸動作仮想実績が得られない場合、前記トルク指令を生成しない、シミュレーション装置。
続きを表示(約 1,000 文字)
【請求項2】
前記軸動作仮想実績は、前記サーボ制御模擬部が初回の動作においてのみ取得する軸動作仮想実績初期値及び前記駆動軸模擬部によって更新される軸動作仮想実績更新値を含む、請求項1に記載のシミュレーション装置。
【請求項3】
前記モジュール部は、前記工作機械の検出器情報に基づいて前記軸動作仮想実績を補正する検出器模擬部を更に備える、請求項1又は2に記載のシミュレーション装置。
【請求項4】
前記シミュレーション装置は、前記工作機械の検出器情報に基づいて前記軸動作仮想実績を補正する検出器模擬部を更に備え、
前記送受信部は、補正された前記軸動作仮想実績を前記検出器模擬部へ送信する、請求項1又は2に記載のシミュレーション装置。
【請求項5】
前記検出器情報は、少なくとも、前記駆動軸模擬部の計算周期、計算結果の遅延量、駆動軸の検出器の分解能、及びフィードバックの遅延量を含む、請求項3に記載のシミュレーション装置。
【請求項6】
前記駆動軸模擬部は、複数のモータによって駆動される駆動機構をシミュレーションする場合、前記工作機械の他の軸の前記トルク指令又は前記他の軸の前記軸動作仮想実績に基づいて、シミュレーションを実行する、請求項1又は2に記載のシミュレーション装置。
【請求項7】
コンピュータに、
数値制御模擬部によって、加工プログラムに基づいて、工作機械の軸動作指令を生成するステップと、
サーボ制御模擬部によって、前記軸動作指令、及び前記工作機械の軸動作を模擬するための軸動作仮想実績に基づいてトルク指令を生成するステップと、
数値制御模擬部及びサーボ制御模擬部とは独立した形態であり、交換可能なモジュール部によって、サーボ制御模擬部から前記トルク指令を受信し、前記サーボ制御模擬部へ前記軸動作仮想実績を送信するステップと、
前記モジュール部によって、前記トルク指令に基づいて、前記工作機械の駆動軸の動作をシミュレーションすると共に、前記軸動作仮想実績を更新するステップと、
を実行させるためのコンピュータプログラムであって、
前記モジュール部は、前記工作機械を制御するシステムに依存しない外部装置によって生成されており、
前記軸動作仮想実績が得られた場合、前記トルク指令を生成し、前記軸動作仮想実績が得られない場合、前記トルク指令を生成しない、
コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、シミュレーション装置及びコンピュータプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、複数の駆動軸と、それらの複数の駆動軸を制御するコントローラとを備える工作機械の動作を検証するために、当該コントローラのユーザプログラムの実行を模擬するシミュレーション装置によって動作を検証することができる。このようなシミュレーション装置において、駆動軸のシミュレーションのモデルは、予め決定されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6460138号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、工作機械の動作は、軸のイナーシャ、摩擦、干渉等の駆動軸の様態に依存する部分が大きい。工作機械における駆動軸の様態は、多様であり、固定されたモデルでは、全ての駆動軸を模擬することはできない。例えば、特許文献1では、軸干渉、摩擦の考慮、他の軸の状態でイナーシャが変わる等のような駆動軸の構成を模擬することができない。
【0005】
このように既存の工作機械のシミュレーション装置は、予め決定された固定のモデルでしか駆動軸を模擬できない。そのため、駆動軸のシミュレーションのモデルを変更して、様々な種類の駆動軸をシミュレーションできるシミュレーション装置及びコンピュータプログラムが望まれている。
【課題を解決するための手段】
【0006】
本開示の一態様は、工作機械のシミュレーション装置であって、加工プログラムに基づいて、前記工作機械の軸動作指令を生成する数値制御模擬部と、前記軸動作指令、及び前記工作機械の軸動作を模擬するための軸動作仮想実績に基づいてトルク指令を生成するサーボ制御模擬部と、前記数値制御模擬部及び前記サーボ制御模擬部とは独立した形態であり、交換可能なモジュール部と、を備え、前記モジュール部は、前記サーボ制御模擬部から前記トルク指令を受信し、前記サーボ制御模擬部へ前記軸動作仮想実績を送信する送受信部と、前記トルク指令に基づいて、前記工作機械の駆動軸の動作をシミュレーションすると共に、前記軸動作仮想実績を更新する駆動軸模擬部と、を備え、前記モジュール部は、前記工作機械を制御するシステムに依存しない外部装置によって生成されており、前記サーボ制御模擬部は、前記軸動作仮想実績が得られた場合、前記トルク指令を生成し、前記軸動作仮想実績が得られない場合、前記トルク指令を生成しない、シミュレーション装置である。
【0007】
本開示の一態様は、コンピュータに、数値制御模擬部によって、加工プログラムに基づいて、工作機械の軸動作指令を生成するステップと、サーボ制御模擬部によって、前記軸動作指令、及び前記工作機械の軸動作を模擬するための軸動作仮想実績に基づいてトルク指令を生成するステップと、前記数値制御模擬部及び前記サーボ制御模擬部とは独立した形態であり、交換可能なモジュール部によって、前記サーボ制御模擬部から前記トルク指令を受信し、前記サーボ制御模擬部へ前記軸動作仮想実績を送信するステップと、前記モジュール部によって、前記トルク指令に基づいて、前記工作機械の駆動軸の動作をシミュレーションすると共に、前記軸動作仮想実績を更新するステップと、を実行させるためのコンピュータプログラムであって、前記モジュール部は、前記工作機械を制御するシステムに依存しない外部装置によって生成されており、前記軸動作仮想実績が得られた場合、前記トルク指令を生成し、前記軸動作仮想実績が得られない場合、前記トルク指令を生成しない、コンピュータプログラム。
【図面の簡単な説明】
【0008】
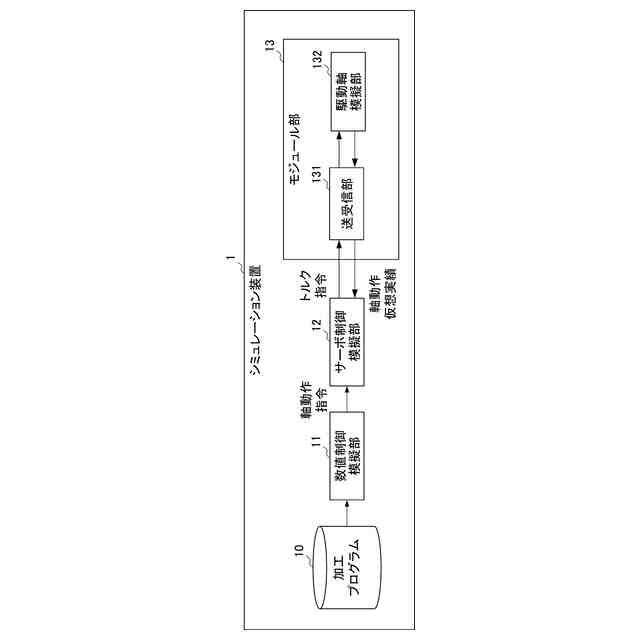
第1実施形態に係るシミュレーション装置の概要を示す機能ブロック図である。
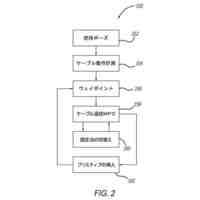
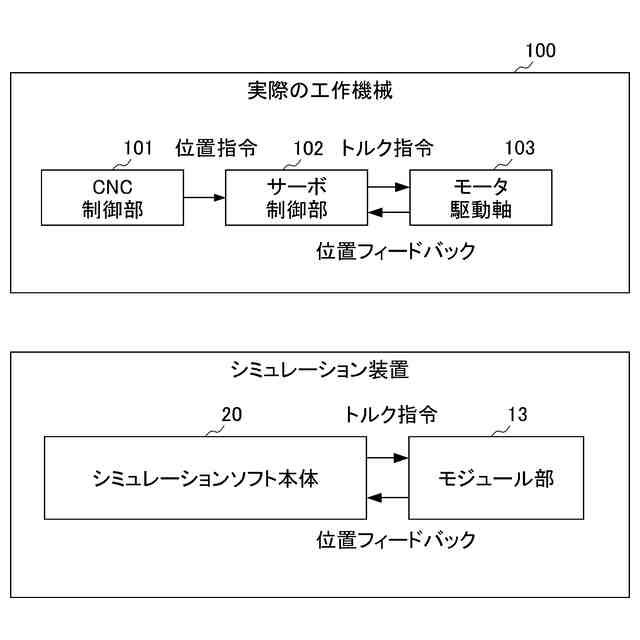
実際の工作機械とシミュレーション装置との構成の対応関係を示す図である。
シミュレーション装置によるシミュレーション例における伝達関数のブロック線図である。
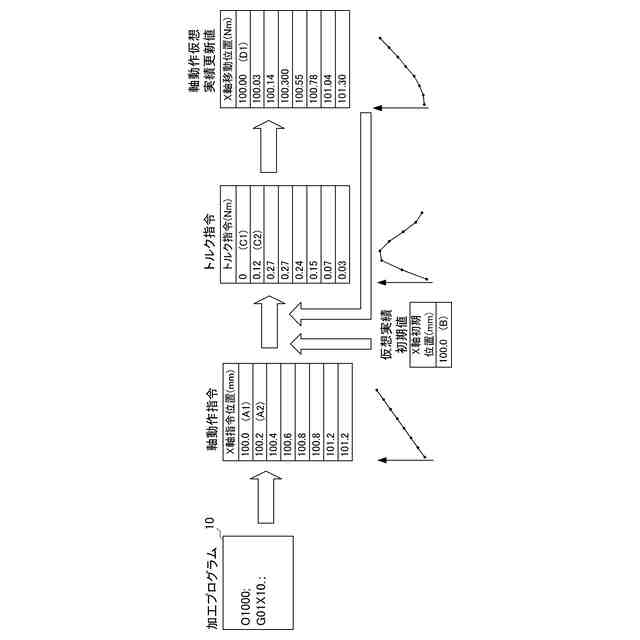
第1実施形態に係るシミュレーション装置の動作例を示す図である。
第2実施形態に係るシミュレーション装置の概要を示す機能ブロック図である。
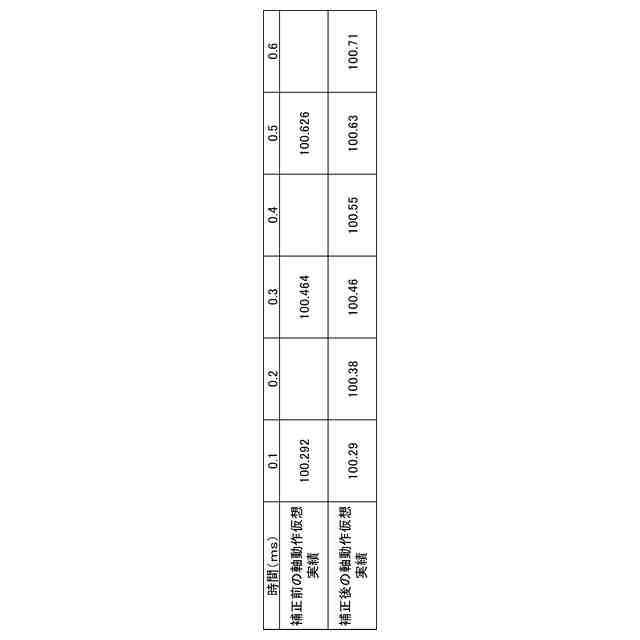
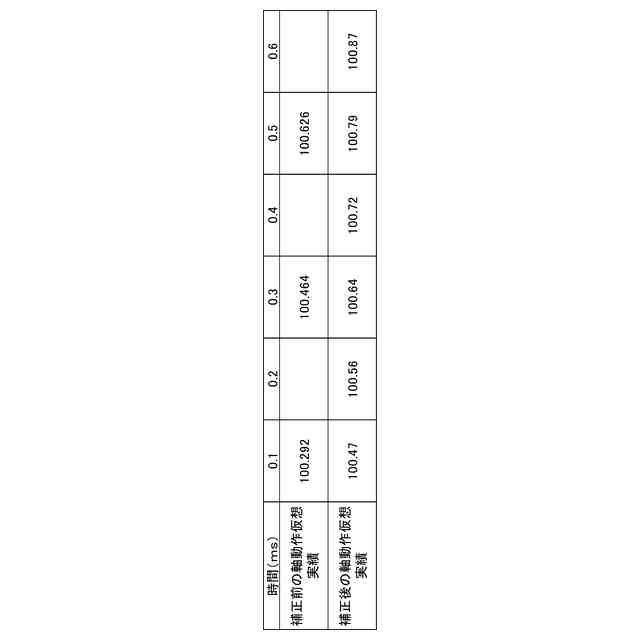
第2実施形態に係る、補正後の軸動作仮想実績を算出する例を示す図である。
第2実施形態に係る、補正後の軸動作仮想実績を算出する例を示す図である。
図6に示す軸動作仮想実績を予測する例を示す図である。
第3実施形態に係るシミュレーション装置の概要を示す機能ブロック図である。
第4実施形態に係るシミュレーション装置の概要を示す図である。
タンデム制御の例を示す図である。
旋削加工の例を示す図である。
【発明を実施するための形態】
【0009】
[第1実施形態]
以下、本開示の実施形態の一例について説明する。図1は、第1実施形態に係るシミュレーション装置1の概要を示す図である。シミュレーション装置1は、駆動軸と、駆動軸を制御するコントローラとを備える工作機械の動作をシミュレーションする。シミュレーション装置1は、例えば、工作機械及び数値制御装置と接続されたコンピュータ装置等であってもよい。また、シミュレーション装置1は、工作機械及び数値制御装置と接続されないシミュレーション用のコンピュータ装置であってもよい。
【0010】
シミュレーション装置1は、数値制御模擬部11と、サーボ制御模擬部12と、モジュール部13と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ファナック株式会社
対象物の干渉チェック方法
27日前
ファナック株式会社
迅速な移動のタッピング方法
6日前
ファナック株式会社
単一のロボットのワイヤハーネスの張力トラッキング
6日前
ファナック株式会社
オンラインロボット動作計画のフレームワーク
16日前
ファナック株式会社
シミュレーション装置及びコンピュータプログラム
2日前
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
3か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
6日前
株式会社ダイヘン
移動体
3か月前
株式会社FUJI
加工機械ライン
2か月前
愛知製鋼株式会社
車両用システム
1か月前
ローム株式会社
基準電圧源
27日前
個人
作業車両自動化システム
2か月前
ローム株式会社
半導体集積回路
3か月前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
豊田合成株式会社
機器制御装置
2日前
三栄ハイテックス株式会社
基準電圧回路
4か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
4か月前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
16日前
株式会社ダイフク
搬送設備
4か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
減圧弁
2か月前
三菱電機株式会社
自己位置推定装置
4か月前
株式会社鷺宮製作所
制御装置
3か月前
株式会社オプトン
制御プログラム生成装置
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
トヨタ自動車株式会社
移動体、及び制御方法
4か月前
株式会社ダイフク
物品搬送設備
3か月前
キヤノン株式会社
配送システム
1か月前
株式会社ダイフク
物品搬送設備
16日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ