TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025156234
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2025055209
出願日
2025-03-28
発明の名称
車両装置、制御システム、制御方法および制御プログラム
出願人
東日本旅客鉄道株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/646 20240101AFI20251002BHJP(制御;調整)
要約
【課題】検査時のユーザの負担を軽減する。
【解決手段】本開示に係る車両装置100は、軌道を走行する無人の車両装置であって、車両装置100に搭載されたセンサで取得された空間データに基づいて検知された周辺状況の異常に応じて、車両装置100の走行が可能であるか否かを判定する走行判定部133Aと、走行判定部133Aにより走行可能であると判定された場合には、車両装置100の走行を継続させ、走行判定部133Aにより走行可能でないと判定された場合には、車両装置100を帰還させる走行制御部133Cとを有することを特徴とする。
【選択図】図9
特許請求の範囲
【請求項1】
軌道を走行する無人の車両装置であって、
前記車両装置に搭載されたセンサで取得された空間データに基づいて検知された周辺状況の異常に応じて、前記車両装置の走行が可能であるか否かを判定する走行判定部と、
前記走行判定部により走行可能であると判定された場合には、前記車両装置の走行を継続させ、前記走行判定部により走行可能でないと判定された場合には、前記車両装置を帰還させる走行制御部と
を有することを特徴とする車両装置。
続きを表示(約 1,300 文字)
【請求項2】
前記走行判定部は、
前記センサにより取得された空間データに基づいて検知された踏切の周辺の物体の存在または/および前記物体の動きに応じて前記車両装置が前記踏切を走行可能であるか否かを判定し、
前記走行制御部は、
前記走行判定部により走行可能であると判定された場合には、前記車両装置に警報を行わせながら、前記踏切を横断させることを特徴とする請求項1に記載の車両装置。
【請求項3】
前記車両装置は、飛行体またはロボットを積載可能であり、前記飛行体またはロボットに給電する給電部をさらに有することを特徴とする請求項1に記載の車両装置。
【請求項4】
前記車両装置は、離載線可能な場所から載線または離線可能であることを特徴とする請求項1に記載の車両装置。
【請求項5】
前記走行判定部は、
分岐器の開通方向に応じて前記車両装置が走行可能であるか否かを判定することを特徴とする請求項1に記載の車両装置。
【請求項6】
前記走行判定部は、踏切遮断操作によって障害物が回避可能である場合に車両の走行が可能であると判定することを特徴とする請求項1に記載の車両装置。
【請求項7】
前記車両装置のエネルギー残量が閾値未満であるか否かを判定するエネルギー判定部をさらに有し、
前記走行制御部は、
前記走行判定部により走行可能であると判定され、かつ、前記エネルギー判定部により前記車両装置のエネルギー残量が所定の閾値以上であると判定された場合には、前記車両装置の走行を継続させ、前記走行判定部により走行可能でないと判定され、または、前記エネルギー判定部により前記車両装置のエネルギー残量が所定の閾値以上でないと判定された場合には、前記車両装置を帰還させる
ことを特徴とする請求項1に記載の車両装置。
【請求項8】
前記車両装置に搭載された撮像装置により周辺状況を撮像する撮像部と、
前記撮像部により撮像された画像データとセンサにより取得されたデータに基づいて前記周辺状況の異常が検知された場合、かつ/または、前記車両装置が事前設定箇所に到着した場合、前記車両装置に積載可能である飛行体またはロボットの移動を制御する移動制御部と
を有することを特徴とする請求項1または3に記載の車両装置。
【請求項9】
前記飛行体またはロボットに搭載された撮像装置により撮像された画像データを取得する画像取得部と
を有することを特徴とする請求項8に記載の車両装置。
【請求項10】
前記移動制御部は、
前記飛行体または前記ロボットが移動する方向と、位置と、前記飛行体または前記ロボットに搭載された前記撮像装置により撮像を行う方向とを含む移動ルートを設定し、前記飛行体または前記ロボットが設定した前記移動ルートを移動するよう制御する
ことを特徴とする請求項9に記載の車両装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両装置、制御システム、制御方法および制御プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、線路の検査作業は、検査車両と検査車両を操作するユーザにより行われている。また、近年では、無人で走行する検査車両に障害物を検知させる技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-180702号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の従来技術では、必ずしも検査時のユーザの負担を軽減することができないという課題がある。例えば、検知される障害物には回避可能なものや、時間の経過に伴い解消されるものも存在しているが、従来技術では検査車両が障害物を検知すると元の走行開始位置に戻ってしまい線路の検査を継続できない場合があった。
【0005】
本発明は、上記の課題を解決するため、検査時のユーザの負担を軽減する車両装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の車両装置は、軌道を走行する無人の車両装置であって、前記車両装置に搭載されたセンサで取得された空間データに基づいて検知された周辺状況の異常に応じて、車両装置の走行が可能であるか否かを判定する走行判定部と、前記走行判定部により走行可能であると判定された場合には、前記車両装置の走行を継続させ、前記走行判定部により走行可能でないと判定された場合には、前記車両装置を帰還させる走行制御部とを有することを特徴とする。
【発明の効果】
【0007】
本発明によれば、検査時のユーザの負担を軽減することができる。
【図面の簡単な説明】
【0008】
図1は、実施形態に係る制御システムの構成の一例を示す図である。
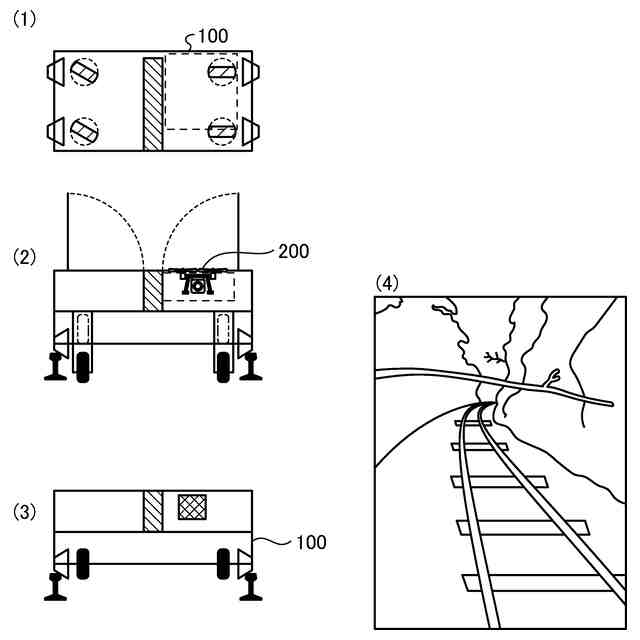
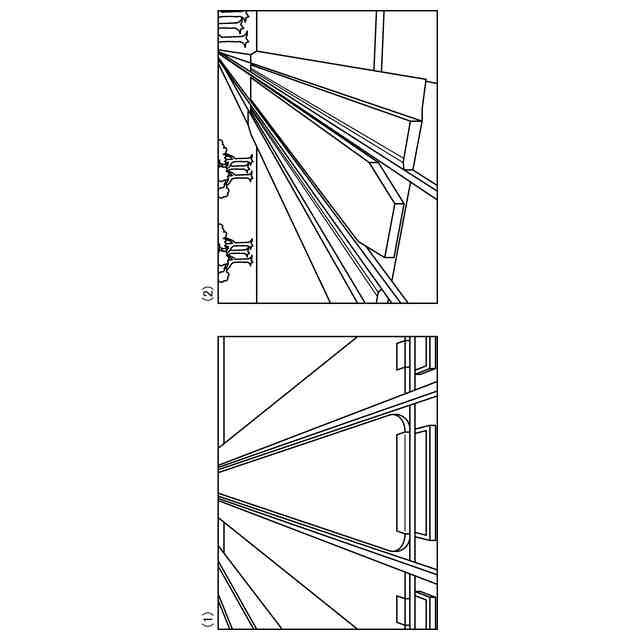
図2は、実施形態に係る車両装置の具体例を示す図である。
図3は、実施形態に係る車両装置の具体例を示す図である。
図4は、実施形態に係る車両装置の具体例を示す図である。
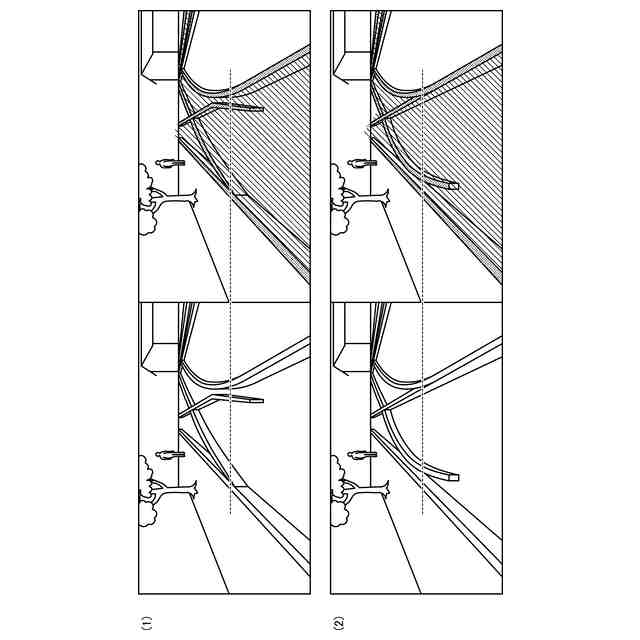
図5は、実施形態に係る車両装置の走行の一例について示す図である。
図6は、実施形態に係る車両装置の走行の一例について示す図である。
図7は、実施形態に係る車両装置の走行の一例について示す図である。
図8は、実施形態に係る制御システムによる実施概要を示す図である。
図9は、実施形態に係る車両装置の構成の一例を示す図である。
図10は、実施形態に係る飛行制御部による飛行制御処理の一例を示す図である。
図11は、実施形態に係る出力部による出力処理の一例を示す図である。
図12は、実施形態に係る出力部による出力処理の一例を示す図である。
図13は、実施形態に係る飛行体の構成の一例を示す図である。
図14は、実施形態に係る制御システムによる全体の処理を説明する図である。
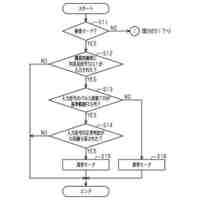
図15は、実施形態に係る車両装置による走行処理の流れの一例を示すフローチャートである。
図16は、実施形態に係る制御システムによる撮像処理の流れの一例を示すフローチャートである。
図17は、実施形態に係る車両装置による飛行体制御処理の流れの一例を示すフローチャートである。
図18は、実施形態に係る車両装置による踏切走行処理の流れの一例を示すフローチャートである。
図19は、実施形態に係る車両装置による踏切遮断を行わない踏切走行処理の流れの一例を示すフローチャートである。
図20は、実施形態に係る車両装置による分岐器走行処理の流れの一例を示すフローチャートである。
図21は、実施形態に係る制御システムの構成の変形例を示す図である。
図22は、実施形態に係るサーバの構成の一例を示す図である。
図23は、制御プログラムを実行するコンピュータの一例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、本願に係る車両装置、制御システム、制御方法および制御プログラムの実施形態を詳細に説明する。なお、この実施の形態により本発明が限定されるものではない。また、図面の記載において、同一部分には同一の符号を付して示しており、重複する説明は省略される。
【0010】
〔制御システムの構成〕
まず、実施形態1に係る制御システムの構成について説明する。図1は、実施形態1に係る制御システム1の全体構成の一例を示す図である。図1に示す制御システム1は、車両装置100と、飛行体200と、端末装置300とを有する。車両装置100と、飛行体200と、端末装置300とは、所定の通信網(ネットワークN)を介して、有線又は無線により通信可能に接続される。例えば、車両装置100と飛行体200とは、Bluetooth(登録商標)により接続される。また、車両装置100と端末装置300とは、無線LAN(Local Area Network)により接続される。なお、上記の接続方式は一例であり、その他の既知の接続方式による接続が可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社FUJI
加工機械ライン
3か月前
愛知製鋼株式会社
車両用システム
2か月前
株式会社熊谷組
障害物の検出方法
27日前
ローム株式会社
基準電圧源
1か月前
個人
作業車両自動化システム
3か月前
新電元工業株式会社
作業用ロボット
25日前
株式会社クボタ
作業車
5日前
豊田合成株式会社
機器制御装置
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
3か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
トヨタ自動車株式会社
減圧弁
3か月前
キヤノン株式会社
配送システム
2か月前
トヨタ自動車株式会社
制御装置
1か月前
エイブリック株式会社
電流補償回路及び半導体装置
21日前
カヤバ株式会社
減圧弁
1か月前
マーク ヘイリー
消防ロボット
3か月前
トヨタ自動車株式会社
クラッチペダル
2か月前
株式会社ダイフク
物品搬送設備
6日前
株式会社ダイフク
物品搬送設備
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
株式会社テイエルブイ
減圧弁の制御装置
3か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
日野自動車株式会社
自動運転装置
26日前
株式会社TMEIC
安全性診断装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ