TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025061909
公報種別
公開特許公報(A)
公開日
2025-04-11
出願番号
2025012600,2021097951
出願日
2025-01-29,2021-06-11
発明の名称
運行計画生成装置、学習装置、運行計画生成方法、学習方法、及びプログラム
出願人
日本電気通信システム株式会社
,
国立大学法人 香川大学
代理人
個人
主分類
G08G
1/09 20060101AFI20250404BHJP(信号)
要約
【課題】一定の空間内に同一の時間帯に運行できる自律移動装置の数を増やすような運行計画を自動的に生成可能にする。
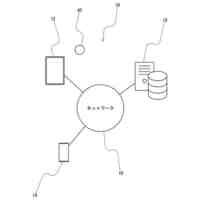
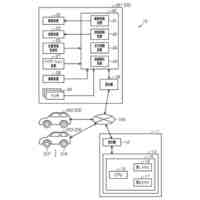
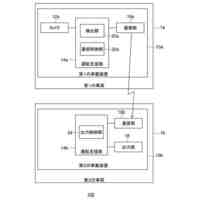
【解決手段】運行計画生成装置1は、運行希望情報を含む運行計画生成要求に対し、自律移動装置について複数の通過ポイントを含む運行計画を生成する制御部1aと、記憶部1bを備える。記憶部1bは実行運行計画とその実行時の運行実績との関係を記憶する。制御部1aは、運行希望情報に基づき複数の通過ポイントを含む運行計画候補を生成し、運行計画候補について上記関係に基づき前記運行計画候補に従って運行した場合に起こり得る位置的、時刻的なずれを予測する。制御部1aは、運行計画候補について、予測した結果に基づき他の自律移動装置の競合を禁止する排他領域を設定する。制御部1aは、他の自律移動装置について生成済み且つ未完了の運行計画と競合しない運行計画候補を応答する運行計画に決定する。
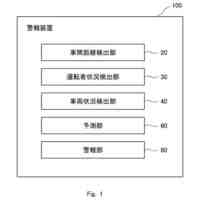
【選択図】図1
特許請求の範囲
【請求項1】
運行希望情報を含む運行計画生成要求に対し、前記運行希望情報に運行対象として含まれる自律移動装置について、複数の通過ポイントを含む運行計画を生成する制御部を備え、
前記制御部は、
前記運行希望情報に基づき、複数の通過ポイントを含む運行計画候補を生成し、
前記運行計画候補について、他の自律移動装置が競合して運行することを禁止する領域として、前記運行計画候補に含まれる複数の通過ポイントにおける隣り合う通過ポイント間を結ぶ区間経路のそれぞれについて、前記区間経路を囲うように排他領域を設定し、
前記運行計画候補のうち、他の自律移動装置について生成済み且つ未完了の運行計画と競合しない候補を、前記運行計画生成要求に対して応答する運行計画に決定する、
運行計画生成装置。
続きを表示(約 2,600 文字)
【請求項2】
前記制御部は、前記生成済み且つ未完了の運行計画と競合しない候補として、前記運行計画候補のうち、前記生成済み且つ未完了の運行計画に含まれる複数の通過ポイントにおける隣り合う通過ポイント間を結ぶ区間経路のそれぞれを囲うように設定されている設定済みの排他領域を除く領域を運行する候補を、前記応答する運行計画に決定する、
請求項1項に記載の運行計画生成装置。
【請求項3】
前記制御部は、前記生成済み且つ未完了の運行計画と競合しない候補として、前記運行計画候補のうち、前記設定済みの排他領域について設定されている設定済みの排他期間において、前記設定済みの排他領域を除く領域を運行する候補を、前記応答する運行計画に決定する、
請求項2に記載の運行計画生成装置。
【請求項4】
前記排他領域における運行方向に垂直な面のサイズは、前記複数の通過ポイントにおける隣り合う通過ポイント間を結ぶ区間経路について、少なくとも2つの前記区間経路について異ならせるように設定される、
請求項1~3のいずれか1項に記載の運行計画生成装置。
【請求項5】
前記排他領域は、前記複数の通過ポイントにおける隣り合う通過ポイント間を結ぶ区間経路について、前記区間経路そのものを示す排他ラインとすることを許容して設定される、
請求項1~4のいずれか1項に記載の運行計画生成装置。
【請求項6】
運行希望情報を含む運行計画生成要求に対し、前記運行希望情報に運行対象として含まれる自律移動装置について複数の通過ポイントを含むように生成された運行計画のうち実行済みである実行運行計画と、前記実行運行計画の実行時の運行実績と、を含む情報を取得する取得部と、
別の運行希望情報に基づき複数の通過ポイントを含むように生成された運行計画候補に従って運行した場合に起こり得る位置的、時刻的なずれを、前記取得部で取得された情報に基づき予測する学習済みモデルを生成する制御部と、
を備え、
前記運行計画は、
前記運行希望情報に基づき生成された、複数の通過ポイントを含む運行計画候補のうち、
他の自律移動装置について生成済み且つ未完了の運行計画に含まれる複数の通過ポイントにおける隣り合う通過ポイント間を結ぶ区間経路のそれぞれについて前記区間経路を囲うように設定されている設定済みの排他領域を除く領域を運行できる計画である、
学習装置。
【請求項7】
運行希望情報を含む運行計画生成要求に対し、前記運行希望情報に運行対象として含まれる自律移動装置について、複数の通過ポイントを含む運行計画を生成する処理を備え、
前記処理は、
前記運行希望情報に基づき、複数の通過ポイントを含む運行計画候補を生成し、
前記運行計画候補について、他の自律移動装置が競合して運行することを禁止する領域として、前記運行計画候補に含まれる複数の通過ポイントにおける隣り合う通過ポイント間を結ぶ区間経路のそれぞれについて、前記区間経路を囲うように排他領域を設定し、
前記運行計画候補のうち、他の自律移動装置について生成済み且つ未完了の運行計画と競合しない候補を、前記運行計画生成要求に対して応答する運行計画に決定する、
運行計画生成方法。
【請求項8】
運行希望情報を含む運行計画生成要求に対し、前記運行希望情報に運行対象として含まれる自律移動装置について複数の通過ポイントを含むように生成された運行計画のうち実行済みである実行運行計画と、前記実行運行計画の実行時の運行実績と、を含む情報を取得し、
別の運行希望情報に基づき複数の通過ポイントを含むように生成された運行計画候補に従って運行した場合に起こり得る位置的、時刻的なずれを、取得した情報に基づき予測する学習済みモデルを生成し、
前記運行計画は、
前記運行希望情報に基づき生成された、複数の通過ポイントを含む運行計画候補のうち、
他の自律移動装置について生成済み且つ未完了の運行計画に含まれる複数の通過ポイントにおける隣り合う通過ポイント間を結ぶ区間経路のそれぞれについて前記区間経路を囲うように設定されている設定済みの排他領域を除く領域を運行できる計画である、
学習方法。
【請求項9】
コンピュータに、
運行希望情報を含む運行計画生成要求に対し、前記運行希望情報に運行対象として含まれる自律移動装置について、複数の通過ポイントを含む運行計画を生成する処理であって、
前記運行希望情報に基づき、複数の通過ポイントを含む運行計画候補を生成し、
前記運行計画候補について、他の自律移動装置が競合して運行することを禁止する領域として、前記運行計画候補に含まれる複数の通過ポイントにおける隣り合う通過ポイント間を結ぶ区間経路のそれぞれについて、前記区間経路を囲うように排他領域を設定し、
前記運行計画候補のうち、他の自律移動装置について生成済み且つ未完了の運行計画と競合しない候補を、前記運行計画生成要求に対して応答する運行計画に決定する、
処理を実行させるプログラム。
【請求項10】
コンピュータに、
運行希望情報を含む運行計画生成要求に対し、前記運行希望情報に運行対象として含まれる自律移動装置について複数の通過ポイントを含むように生成された運行計画のうち実行済みである実行運行計画と、前記実行運行計画の実行時の運行実績と、を含む情報を取得し、
別の運行希望情報に基づき複数の通過ポイントを含むように生成された運行計画候補に従って運行した場合に起こり得る位置的、時刻的なずれを、取得した情報に基づき予測する学習済みモデルを生成する、
処理を実行させ、
前記運行計画は、
前記運行希望情報に基づき生成された、複数の通過ポイントを含む運行計画候補のうち、
他の自律移動装置について生成済み且つ未完了の運行計画に含まれる複数の通過ポイントにおける隣り合う通過ポイント間を結ぶ区間経路のそれぞれについて前記区間経路を囲うように設定されている設定済みの排他領域を除く領域を運行できる計画である、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、運行計画生成装置、学習装置、運行計画生成方法、学習方法、及びプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、ドローンや自動運転車などの自律的に移動する装置(自律移動装置)の研究が盛んになされ、一部で実際に利用されてきている。また、労働者人口の減少や、コスト低減や業務効率化のため、今後、自律移動装置のさらなる普及が見込まれる。例えば、荷物の運搬や配送、配達などの業務が、人及び人が運転する自動車から自律移動装置に置き換わっていくことで、自律移動装置が人の生活に密着した場面で用いられることも見込まれる。そうなると、人の生活空間において自律移動装置が運用されることになるため、自律移動装置は、安全に運行されることが求められるとともに、確実な運行、到達時刻を遵守するなどの安定した運行も求められる。
【0003】
特許文献1には、船舶の航路の管制精度を、計算量を抑制しつつ向上させることを目的とし、記憶部、指示応答性推定部、地理Eマップ生成部、及び移動予測部を有する交通管制支援システムが記載されている。上記記憶部は、移動体の行動に関する行動データと、地図をメッシュで分割した個々の区画に、移動体の移動基準に関する情報である地理属性情報が付与されている地理データと、指示に対する移動体の応答性に関する応答性データと、を有する。上記指示応答性推定部は、上記応答性データに基づいて移動体の理想的な行動を推定し、その推定した行動と上記行動データの行動との差分を算出し、その算出結果に基づいて上記応答性データを更新する。上記地理Eマップ生成部は、上記行動データ、上記地理データ及び上記応答性データに基づいて上記移動体が各時刻において或る座標に存在する確からしさを推定し、地理Eマップを生成する。上記移動予測部は、上記地理Eマップに基づいて、上記移動体の未来の座標を予測する。
【先行技術文献】
【特許文献】
【0004】
特開2018-36958号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明者らは、自律移動装置を安全且つ安定に運行させるような運用について考察した。
まず、自律移動装置によっては、与えられた運行経路、運行時間で移動する、つまり運行計画に沿うよう自律的に経路制御を行い移動するという運用が行われることが多い。自律移動装置は移動中に外乱があっても運行経路及び運行時間、つまり運行計画に沿うよう自律的に軌道を修正して移動する。例えば、ドローンのような空を運行する装置や洋上を移動する船舶のような装置などであれば、運行経路外れるような外乱の代表例は風である。自律移動装置は風などの外乱があっても最大限運行計画に沿うよう自律的に機体を制御し移動する。
【0006】
自律移動装置の代表的な例を挙げると、目視外で自律飛行をするドローンである。自律飛行をするドローンは、操作者から逐次指示を受けるのではなく、与えられた経路に沿うように自身で判断を行いながら移動することができる。但し、自律移動装置はある程度の自律航行機能を有してはいるが、不測の事態に対応するため、安全な運行を確保するために、運行管理装置から遠隔で、通信を介して現在位置の把握などをして監視しながら運行されることが望まれる。運行経路の監視も運行管理装置の機能の一つとしてもたせることが望まれる。
【0007】
また、自律移動装置の中にはセンサなどを用いて互いに衝突を回避する機能を備える自律移動装置もあるが、街中などでも使われることから万が一にも自律移動装置同士の衝突が起きては困る。そのため、複数の自律移動装置が同時に運行されても、自律移動装置が衝突しないために、自律移動装置同士が接触しないよう、予め経路や時刻を調整し、計画しておくことが望まれる。調整計画済みの運行経路や通過時刻は運行計画と称することができ、このような運行計画の策定は運行管理装置の機能の一つである。
【0008】
自律移動装置の運行計画の策定方法について考察した結果、主に次のような2つの問題があることが分かった。問題の1つ目は、始点と終点を設定するだけで、経路の設計をして他の自律移動装置の経路と調整された運行計画を生成するという一連の手続きを自動で行う方法がなく、Webを介した人手による手続きが行われていることである。運行されるドローンが少なく、ある空域における運行密度も高くない場合には、人手による手続きでも運行計画を調整することが可能であるが、運用台数が増えると破綻してしまう。
【0009】
問題の2つ目は、人手による手続きで運行計画をたてると、空間的の利用効率や時間的な利用効率が悪くなり、多数の自律移動装置を同一空間内で効率良く運行できないことである。例えば、航路の設計や衝突判定を一律固定の幅の経路(保護空域)で扱うことが考えられるが、このような一律の保護空域を考慮した場合でも効率の良い運行はできるとは言い難い。
【0010】
具体的に説明すると、まず、上述したように、自律移動装置は、運行経路を定めても外乱などで一時的に計画経路からずれることがある。そのため、通常、他の自律移動装置などと衝突しないように大きな余裕範囲をとるように経路を設計することが考えられる。例えば、ドローンのような空を飛ぶ自律移動装置の水平面方向の場合、運行が許される最大の風速下において、風で流されたとしても、他の運行区画にはみ出さない程度の距離的余裕をとることが考えられる。また、この大きな余裕は、時間的にも確保する必要がある。例えば、ドローンのような空を飛ぶ自律移動装置の場合、同じ空間上の区画内に同じ時間帯に複数のドローンが入ると衝突が起きるため、あるドローンがある空間を占有できる時間帯は、遅れを考慮して長くとる必要がある。しかしながら、これらの余裕を大きく取りすぎると、空間の利用効率が下がり、一定の空間内に同一の時間帯に同時に運行できる自律移動装置の数が少なく抑えられてしまう。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
路面投影装置
7日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
2日前
ニッタン株式会社
発信機
13日前
個人
防犯に特化したアプリケーション
15日前
TOA株式会社
拡声放送システム
6日前
東京都公立大学法人
液滴検出装置
15日前
アズビル株式会社
建物管理システム
1か月前
日本信号株式会社
情報提供システム
今日
日本信号株式会社
信号情報システム
今日
株式会社アジラ
データ転送システム
6日前
株式会社JVCケンウッド
警報装置
1日前
ホーチキ株式会社
異常報知設備
1か月前
株式会社JVCケンウッド
情報処理装置
28日前
日本信号株式会社
交通信号制御システム
今日
トヨタ自動車株式会社
回避動作判別装置
今日
株式会社フィットネスワン
見守りシステム
1か月前
ホーチキ株式会社
非常通報システム
1か月前
株式会社豊田自動織機
制御システム
6日前
ホーチキ株式会社
火災検出システム
1日前
Adora株式会社
アプリ使用制御システム
1か月前
トヨタ自動車株式会社
障害物検知装置
22日前
ユニティガードシステム株式会社
警備監視システム
1か月前
個人
注意喚起システム及び注意喚起装置
6日前
大和ハウス工業株式会社
住環境管理設備
1日前
能美防災株式会社
火災感知器窓部清掃システム
20日前
シャープ株式会社
駐車場管理装置
1か月前
トヨタ自動車株式会社
情報処理装置
13日前
株式会社アドヴィックス
走行支援システム
1か月前
株式会社エイビット
工事観測システム
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
路面状態の推定方法
6日前
トヨタ自動車株式会社
運転支援装置
1日前
株式会社アイシン
重畳画像表示装置
1か月前
株式会社アイシン
重畳画像表示装置
1か月前
ホシデン株式会社
センサ装置システム
21日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ