TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101981
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219114
出願日
2023-12-26
発明の名称
作業機械
出願人
株式会社クボタ
代理人
弁理士法人サンクレスト国際特許事務所
主分類
B60K
28/00 20060101AFI20250701BHJP(車両一般)
要約
【課題】危険時に水素ガスの漏れを防止する。
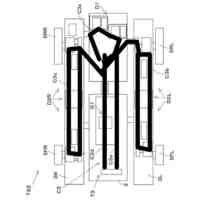
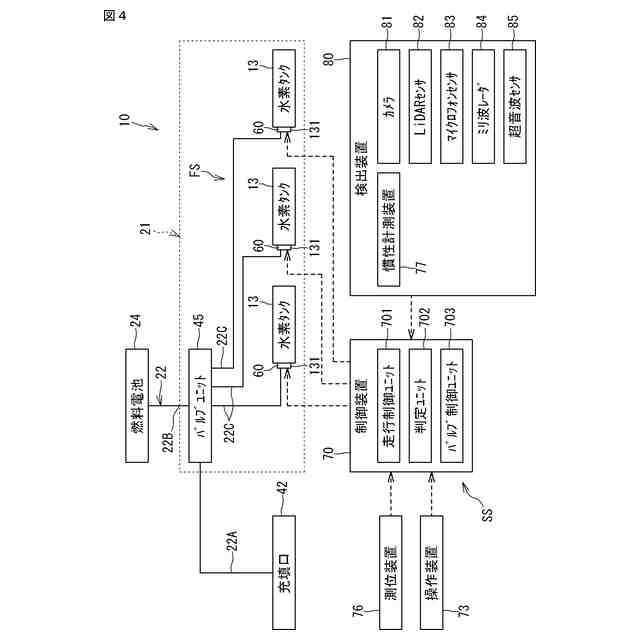
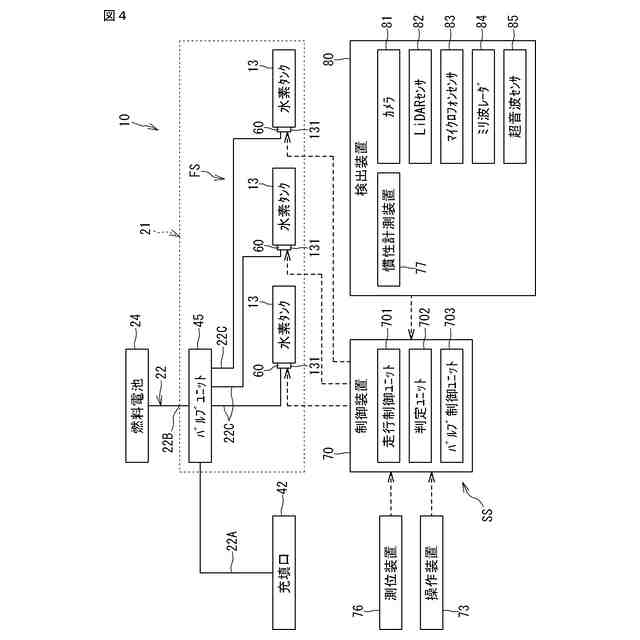
【解決手段】作業機械は、走行可能である車両本体と、前記車両本体に搭載されているタンク13と、前記車両本体に搭載され前記タンク13から供給された水素により発電する燃料電池24と、前記タンク13から前記燃料電池24への水素の供給を遮断可能であるバルブ60と、前記車両本体に設けられた検出装置80と、を有し、前記車両本体は、前記検出装置80の検出情報に基づいて走行し、前記バルブ60は、前記検出情報によって得られた前記車両本体の走行状況が危険であると判断された場合、閉じられる。
【選択図】 図4
特許請求の範囲
【請求項1】
走行可能である車両本体と、
前記車両本体に搭載されるタンクと、
燃料電池と、
前記タンクから前記燃料電池への供給路を遮断可能であるバルブと、
前記車両本体に設けられた検出装置と、
を有し、
前記車両本体は、前記検出装置の検出情報に基づいて走行し、
前記バルブは、前記検出情報によって得られた前記車両本体の走行状況が危険であると判断された場合、閉じられる、
作業機械。
続きを表示(約 650 文字)
【請求項2】
前記検出装置は、前記車両本体の周囲の障害物を検出可能であり、
前記車両本体は、前記検出装置によって検出された前記障害物と前記車両本体との位置が所定距離以下である場合、前記障害物を回避する動作、又は、前記走行を停止する動作を実行し、
前記バルブは、前記障害物と前記車両本体との位置が所定距離以下である場合、前記走行状況が危険であるとして、閉じられる、
請求項1に記載の作業機械。
【請求項3】
前記検出装置は、LiDARセンサ、ミリ波レーダ、及び超音波センサのうちの少なくとも一つを含み、
前記バルブは、前記LiDARセンサ、前記ミリ波レーダ、及び前記超音波センサのうちの少なくとも一つが検出した前記検出情報に基づいて、閉じられる、
請求項1に記載の作業機械。
【請求項4】
利用者が操作する操作装置からの信号を取得すると、前記バルブは、閉じた状態から開いた状態に切り替わる、請求項1に記載の作業機械。
【請求項5】
前記車両本体は、前記バルブが閉じた状態から開いた状態に切り替わると、前記障害物を回避する動作、又は、前記走行を停止する動作を停止する、請求項4に記載の作業機械。
【請求項6】
前記タンク、及び、前記タンクを支持する支持部材を有するタンクユニットを有し、
前記バルブは、前記タンクユニットに設けられている、
請求項1に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
環境保護の観点から、燃料電池を搭載し、燃料電池が生成した電力により回転するモータで駆動する作業機械が提案されている(例えば、特許文献1参照)。燃料電池の燃料として、水素が用いられる。特許文献1に開示の作業機械は、トラクタであり、その車両本体にタンクが搭載されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-13186号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記のような作業機械において、燃料である水素の漏れを防止するための対策は、作業機械の通常走行時のみならず、例えば、障害物に衝突したり、圃場等の現場への進入路において作業機械が横転したりする危険時においても、必要不可欠とされている。
そこで、本開示では、危険時に水素ガスの漏れを防止することが可能となる作業機械を提供する。
【課題を解決するための手段】
【0005】
本開示の作業機械は、走行可能である車両本体と、前記車両本体に搭載されているタンクと、前記車両本体に搭載され前記タンクから供給された水素により発電する燃料電池と、前記タンクから前記燃料電池への水素の供給を遮断可能であるバルブと、前記車両本体に設けられた検出装置と、を有し、前記車両本体は、前記検出装置の検出情報に基づいて走行し、前記バルブは、前記検出情報によって得られた前記車両本体の走行状況が危険であると判断された場合、閉じられる。
【発明の効果】
【0006】
本開示の作業機械によれば、危険時に水素ガスの漏れを防止することが可能となる。
【図面の簡単な説明】
【0007】
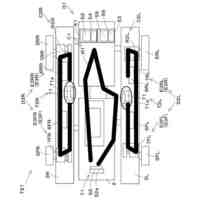
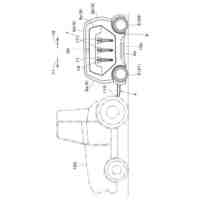
図1は、作業機械の全体構造の一例を示す斜視図である。
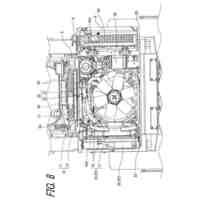
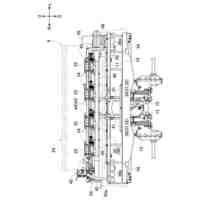
図2は、外装部品の一部を取り外した作業機械の右側面図である。
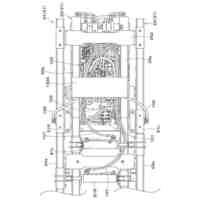
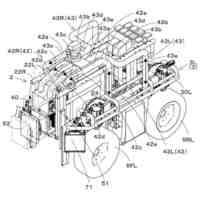
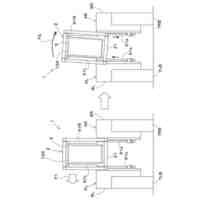
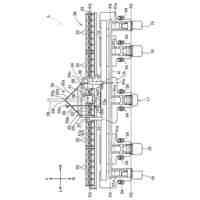
図3は、作業車両の内部構造の一例を示す斜視図である。
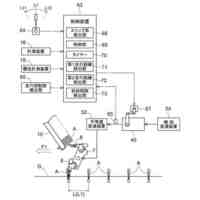
図4は、作業車両の機能的構成の一部を示すブロック図である。
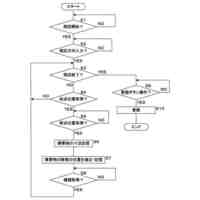
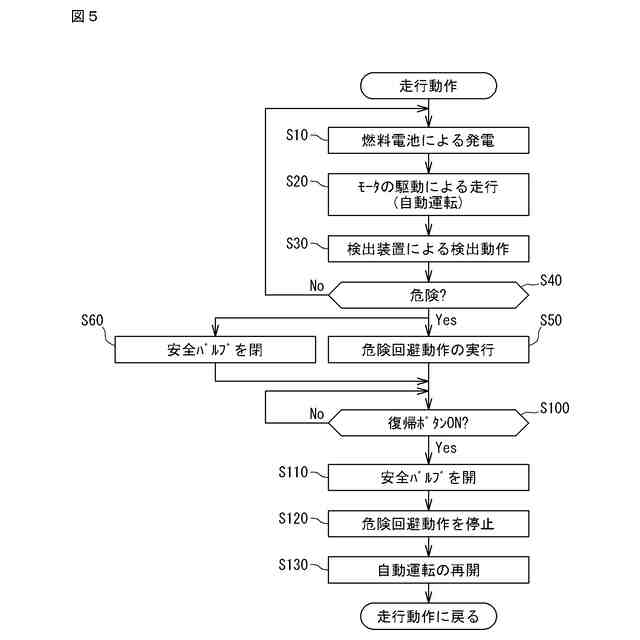
図5は、作業車両の動作を説明するフロー図である。
図6は、作業車両が道路を自動運転により走行する様子を示す説明図である。
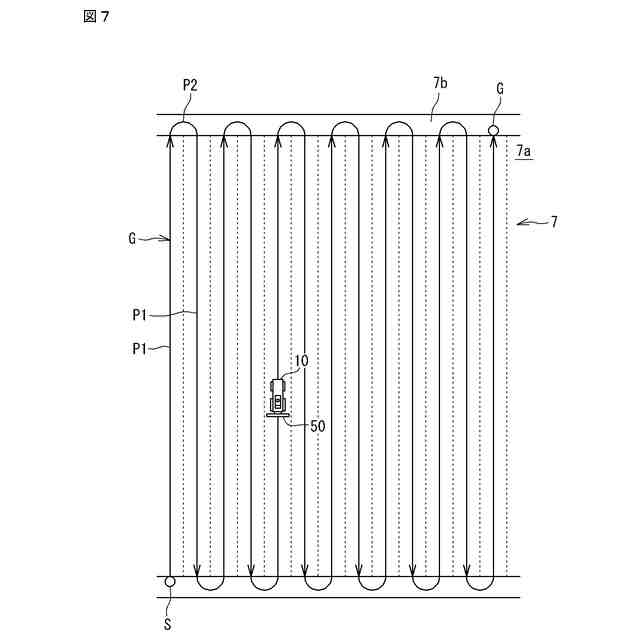
図7は、圃場内で自動運転が行われる場合の目標経路の説明図である。
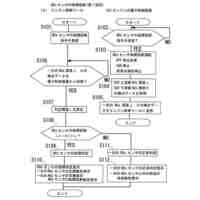
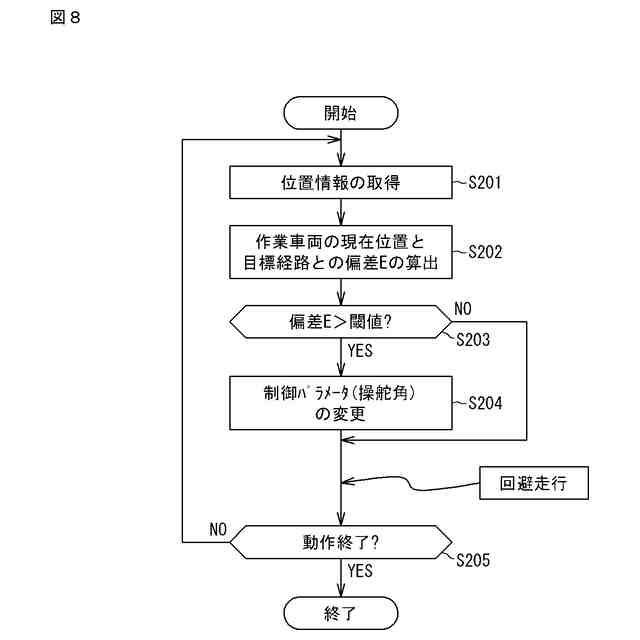
図8は、自動運転のための制御の一例を示すフローチャートである。
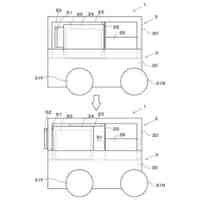
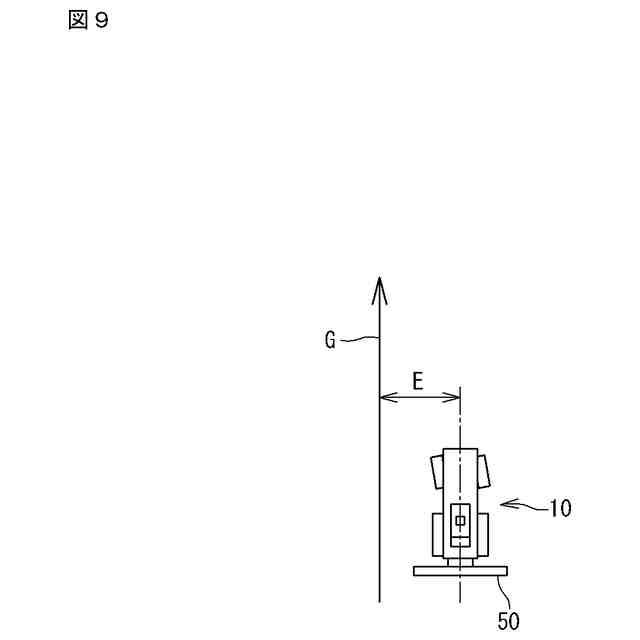
図9は、自動運転により走行する作業車両の説明図である。
【発明を実施するための形態】
【0008】
<本開示の実施形態の概要>
以下、本開示の実施形態の概要を列記して説明する。
(1)本開示の実施形態に係る作業機械は、走行可能である車両本体と、前記車両本体に搭載されるタンクと、燃料電池と、前記タンクから前記燃料電池への供給路を遮断可能であるバルブと、前記車両本体に設けられた検出装置と、を有し、前記車両本体は、前記検出装置の検出情報に基づいて走行し、前記バルブは、前記検出情報によって得られた前記車両本体の走行状況が危険であると判断された場合、閉じられる。
【0009】
前記作業機械によれば、車両本体が検出装置の検出情報に基づいて走行するのに併せて、その検出装置が検出した検出情報が用いられて、車両本体の走行状況が危険であるか否か判断される。危険である場合、バルブが閉じられ、タンクからの水素ガスの供給が遮断され、水素ガスの漏れが防止される。
【0010】
(2)前記(1)の作業機械において、前記検出装置は、前記車両本体の周囲の障害物を検出可能であり、前記車両本体は、前記検出装置によって検出された前記障害物と前記車両本体との位置が所定距離以下である場合、前記障害物を回避する動作、又は、前記走行を停止する動作を実行し、前記バルブは、前記障害物と前記車両本体との位置が所定距離以下である場合、前記走行状況が危険であるとして、閉じられる。
この構成により、作業機械の走行中に周囲の障害物が検出装置によって検出される。その障害物への衝突の可能性がある場合、バルブが閉じられる。衝突前に、タンクからの水素ガスの供給を遮断することが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタケミックス
管枕
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
18日前
株式会社クボタ
作業機
24日前
株式会社クボタケミックス
伸縮継手
5日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
トラクタ
18日前
株式会社クボタ
トラクタ
18日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
圃場作業機
19日前
株式会社クボタ
汚水処理装置
1か月前
株式会社クボタ
可搬型給電車両
1か月前
株式会社クボタ
管継手及びシール部材
1か月前
株式会社クボタ
管接合装置及び管接合方法
1か月前
株式会社クボタケミックス
管路更生工法および管更生部材
14日前
株式会社クボタケミックス
管路更生工法および管更生部材
14日前
株式会社クボタケミックス
三次元積層造形用のフィラメント
1か月前
株式会社クボタ
エンジン及びエンジンの診断方法
1か月前
株式会社クボタ
判定方法、判定システム、および判定プログラム
10日前
株式会社クボタ
作業機
6日前
株式会社クボタ
農作業車
1か月前
株式会社クボタ
農機支援装置、マップ作成方法及びコンピュータプログラム
25日前
株式会社クボタケミックス
排水配管構造
12日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ