TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105699
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2025069026,2024020231
出願日
2025-04-18,2017-04-12
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250703BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業性の向上を図ること。
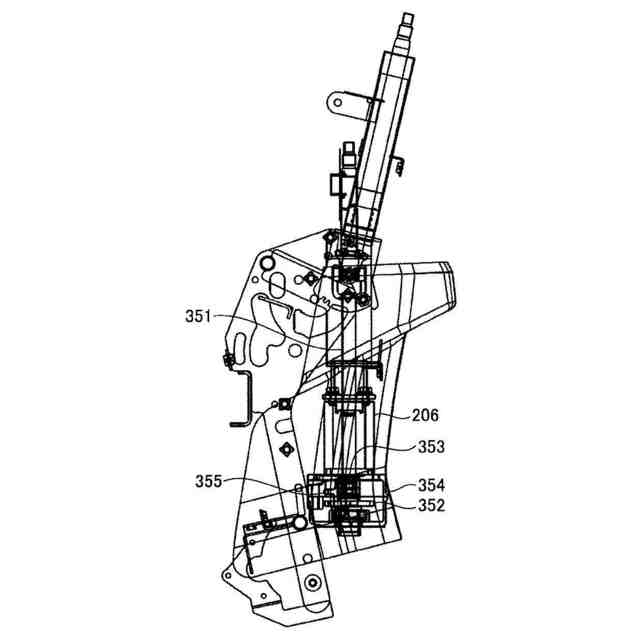
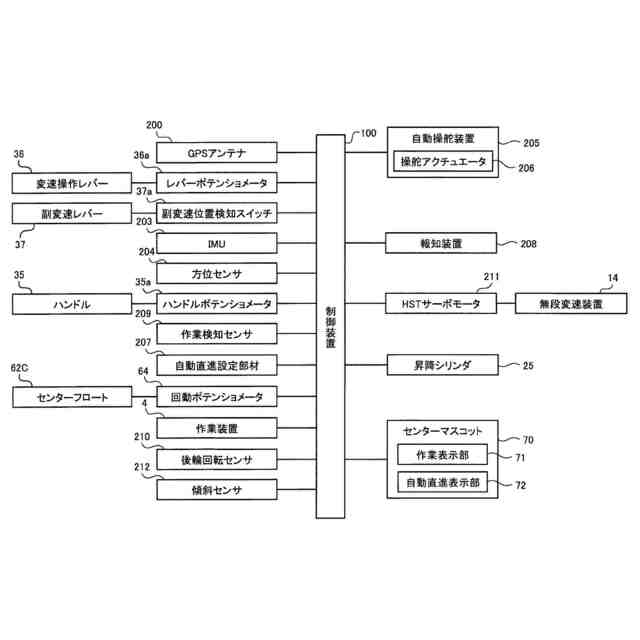
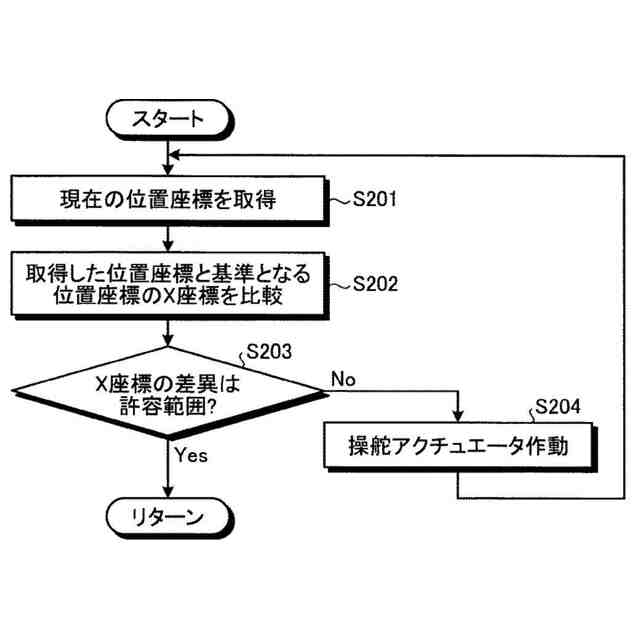
【解決手段】走行車体を操舵操作する操舵部材と、走行車体の位置座標を取得する位置情報取得装置と、操舵部材を作動させて走行車体を自動走行させる自動走行装置と、各部の制御を行う制御装置とを備える作業車両において、圃場の一点で登録される第1基準位置と圃場の他点で登録される第2基準位置を登録することができ、第1基準位置と第2基準位置を結んだ線が、走行の基準となる走行基準データであり、自動走行の入り切り操作を行う操作部を設け、操作部はレバー部材であり、走行基準データが登録され、自動走行が「入」の場合、レバー部材を第1の方向に操作すると自動走行が「切」になり、第2基準位置を登録する際に、第1基準位置を取得した位置からの距離が所定距離未満であるときは、第2基準位置が登録できないことを特徴とする。
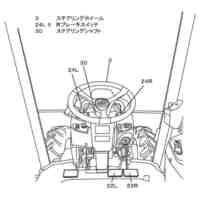
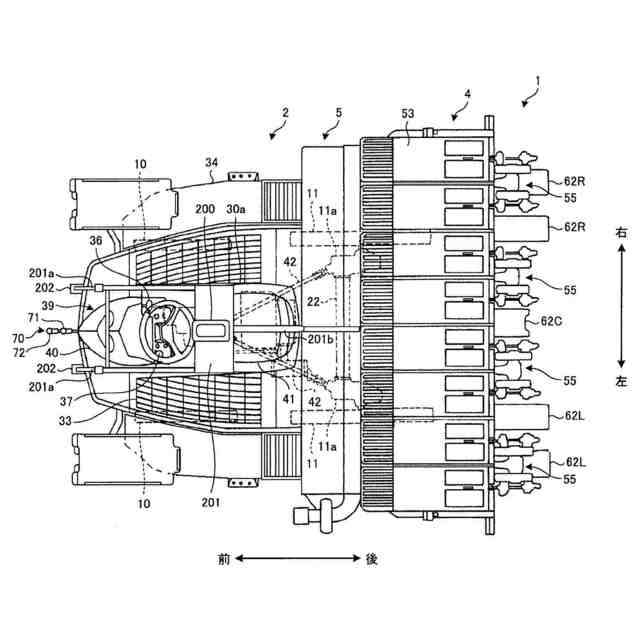
【選択図】図1
特許請求の範囲
【請求項1】
走行車体を操舵操作する操舵部材と、
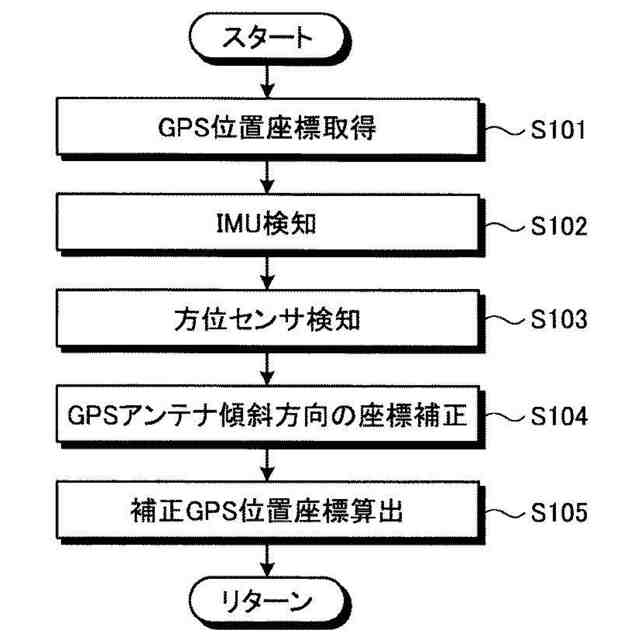
前記走行車体の位置座標を取得する位置情報取得装置と、
前記操舵部材を作動させて前記走行車体を自動走行させる自動走行装置と、各部の制御を行う制御装置とを備える作業車両において、
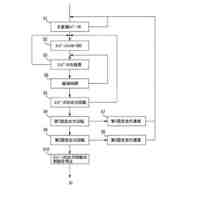
圃場の一点で登録される第1基準位置と該圃場の他点で登録される第2基準位置を登録することができ、
前記第1基準位置と前記第2基準位置を結んだ線が、走行の基準となる走行基準データであり、
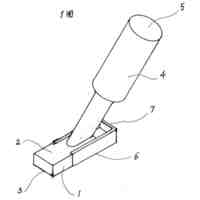
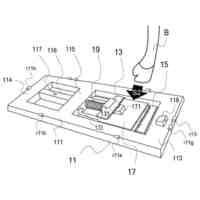
前記自動走行の入り切り操作を行う操作部を設け、
前記操作部はレバー部材であり、
前記走行基準データが登録され、前記自動走行が「入」の場合、前記レバー部材を第1の方向に操作すると前記自動走行が「切」になり、
前記第2基準位置を登録する際に、前記第1基準位置を取得した位置からの距離が所定距離未満であるときは、前記第2基準位置が登録できないことを特徴とする作業車両。
続きを表示(約 210 文字)
【請求項2】
前記レバー部材を第2の方向に操作すると、前記第1基準位置が登録されることを特徴とする請求項1に記載の作業車両。
【請求項3】
前記走行車体に装着され、圃場で作業を行う作業装置を備え、
前記位置情報取得装置により、圃場における作業の最終工程である枕地作業であることを認識すると前記登録した第1基準位置と第2基準位置を削除することを特徴とする請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、たとえば、走行車体で圃場内を走行しながら走行車体に装着された作業装置で対地作業を行う作業車両には、作業開始と作業終了の位置情報を作業装置が入切されたときに取得し、取得した作業開始位置および作業終了位置から基準線を作成し、作成した基準線に沿ってハンドルを自動操舵する機能を有するものがある(たとえば、特許文献1参照)。
【0003】
かかる作業車両では、作業装置が入切された位置を作業開始位置および作業終了位置として取得するため、作業開始位置および作業終了位置を取得する操作が不要となる。
【先行技術文献】
【特許文献】
【0004】
特開2016-21890号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記したような従来の作業車両は基準線を作成する工程で、誤操作する可能性があることを考慮していない。
【0006】
たとえば、作業者が意図せず自動直進設定部材に触れ基準線が短くなる問題がある。
【0007】
本発明は、上記に鑑みてなされたものであって、作業性の向上を図ることができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するために、請求項1に記載の作業車両は、走行車体を操舵操作する操舵部材と、前記走行車体の位置座標を取得する位置情報取得装置と、前記操舵部材を作動させて前記走行車体を自動走行させる自動走行装置と、各部の制御を行う制御装置とを備える作業車両において、圃場の一点で登録される第1基準位置と該圃場の他点で登録される第2基準位置を登録することができ、前記第1基準位置と前記第2基準位置を結んだ線が、走行の基準となる走行基準データであり、前記自動走行の入り切り操作を行う操作部を設け、前記操作部はレバー部材であり、前記走行基準データが登録され、前記自動走行が「入」の場合、前記レバー部材を第1の方向に操作すると前記自動走行が「切」になり、前記第2基準位置を登録する際に、前記第1基準位置を取得した位置からの距離が所定距離未満であるときは、前記第2基準位置が登録できないことを特徴とする。
【0009】
請求項2に記載の作業車両は、請求項1に記載の作業車両において、前記レバー部材を第2の方向に操作すると、前記第1基準位置が登録されることを特徴とする。
【0010】
請求項3に記載の作業車両は、請求項1または2に記載の作業車両において、前記走行車体に装着され、圃場で作業を行う作業装置を備え、
前記位置情報取得装置により、圃場における作業の最終工程である枕地作業であることを認識すると前記登録した第1基準位置と第2基準位置を削除することを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
1日前
井関農機株式会社
コンバイン
今日
個人
ルアー
24日前
個人
播種装置
21日前
個人
虫の生け捕り具
9日前
個人
植物栽培用培地
1日前
個人
プランターセット
28日前
個人
獣捕獲罠装置
1か月前
個人
養殖システム
16日前
個人
生命力近親交配方法
28日前
個人
ペット用オムツカバー
1か月前
株式会社シマノ
釣竿
17日前
岡部株式会社
浮魚礁
9日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
収穫作業車両
10日前
中国電力株式会社
巣撤去具
7日前
個人
漁業支援装置及び方法
22日前
株式会社シマノ
ルアー
2日前
ウエダ産業株式会社
切断装置
17日前
個人
落口枡用取付部材及び落口枡
25日前
第一衛材株式会社
ペット用おむつ
7日前
鹿島建設株式会社
レインガーデン
25日前
個人
害虫捕獲、解放及び駆除装置
1か月前
個人
大型ペット用安定供給水やりシステム
4日前
株式会社ササキコーポレーション
農作業機
23日前
OTIS株式会社
ルアー用スカート
21日前
株式会社クボタ
圃場作業機
16日前
有限会社東北マシン・テクノ
穴開け装置
3日前
株式会社クボタ
水田作業機
28日前
株式会社タカミヤ
台車用レール構造
22日前
株式会社トクイテン
青果物収穫装置
10日前
株式会社シマノ
ルアー
23日前
株式会社Personal AI
反射光拡散装置
28日前
有限会社小阪組
切り株処理方法及び積層体
1か月前
株式会社シマノ
ルアー
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ