TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025113891
公報種別
公開特許公報(A)
公開日
2025-08-04
出願番号
2024008284
出願日
2024-01-23
発明の名称
エンドエフェクタの構造を検知するシステム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20250728BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 ロボットアームに装着されて使用されるエンドエフェクタがどのように動くのかをロボットアーム上で作動せずに簡便に把握できるようにする。
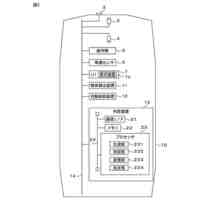
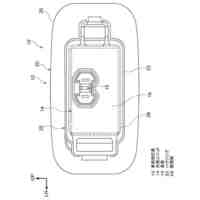
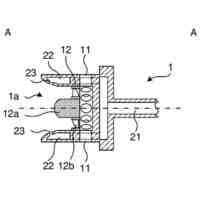
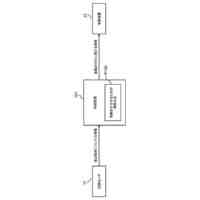
【解決手段】 エンドエフェクタefの構造を検知するシステム1は、エンドエフェクタを撮像する撮像手段2と、撮像手段にて撮像されたエンドエフェクタの画像に於いてエンドエフェクタに於ける構成要素を認識する要素認識手段4と、要素認識手段にて認識された構成要素の可動域を検出する可動域検出手段とを含み、可動域検出手段が、撮像手段により撮像されたエンドエフェクタの取り得る状態の各々に於けるエンドエフェクタの画像の各々に於いて認識された構成要素の像の位置を検出し、検出された位置の変化範囲を構成要素の可動域として検出するよう構成されている。
【選択図】 図2
特許請求の範囲
【請求項1】
エンドエフェクタの構造を検知するシステムであって、
前記エンドエフェクタを撮像する撮像手段と、
前記撮像手段にて撮像された前記エンドエフェクタの画像に於いて前記エンドエフェクタに於ける構成要素を認識する要素認識手段と、
前記要素認識手段にて認識された前記構成要素の可動域を検出する可動域検出手段とを含み、
前記可動域検出手段が、前記撮像手段により撮像された前記エンドエフェクタの取り得る状態の各々に於ける前記エンドエフェクタの画像の各々に於いて認識された前記構成要素の像の位置を検出し、前記検出された位置の変化範囲を前記構成要素の可動域として検出するよう構成されているシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、コンピュータシステムを用いて、ロボットアームの先端に取り付けられるエンドエフェクタの構造を検知するシステムに係り、より詳細には、エンドエフェクタに於ける可動要素の有無、位置或いは更に可動域を検知するシステムに係る。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
近年、製造業において、ロボット導入の需要は高まりを見せている。物の製造に利用されるロボットの場合には、ロボットアームの先端に種々のエンドエフェクタが装着されて、種々の物の加工や操作などが実行される。そこで、ロボットアームの先端に装着されるエンドエフェクタの種類に応じた制御を実行するための技術が種々提案されている。例えば、特許文献1に於いては、ロボットに於いて、これまで使用したことのない交換ハンド(エンドエフェクタ)を使用する際の安全性を確保するためのロボットの制御方法として、エンドエフェクタを装着したロボットアームを駆動した際に可動部の速度が予め定められた速度以上であると判断したときには、ロボットアームの動作速度を低減する構成が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-84173
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットの保守運用には専門の知識が必要で、特にロボットに軌跡を教えるためのロボットティーチングの作業については経験者であっても時間を要する。ロボットのティーチング作業をなくすためには、ロボットが使う予定のエンドエフェクタの構造を理解し、エンドエフェクターを使うために構造を理解する必要がある。その際、エンドエフェクタが何であるか分からない状況において、ロボットアームにエンドエフェクタを装着して動作させる場合、安全の観点から課題があると考えられる。また、未知のエンドエフェクタを使用する場合には、そのエンドエフェクタをロボットアーム上で作動せずに、どのように動くのかが簡便に把握できると有利である。
【0005】
上記の事情に鑑み、本発明の主な課題は、ロボットアームに装着されて使用されるエンドエフェクタがどのように動くのかをロボットアーム上で作動せずに簡便に把握できるようにすることである。
【課題を解決するための手段】
【0006】
本発明によれば、上記の課題は、エンドエフェクタの構造を検知するシステムであって、
前記エンドエフェクタを撮像する撮像手段と、
前記撮像手段にて撮像された前記エンドエフェクタの画像に於いて前記エンドエフェクタに於ける構成要素を認識する要素認識手段と、
前記要素認識手段にて認識された前記構成要素の可動域を検出する可動域検出手段とを含み、
前記可動域検出手段が、前記撮像手段により撮像された前記エンドエフェクタの取り得る状態の各々に於ける前記エンドエフェクタの画像の各々に於いて認識された前記構成要素の像の位置を検出し、前記検出された位置の変化範囲を前記構成要素の可動域として検出するよう構成されているシステム
によって達成される。
【0007】
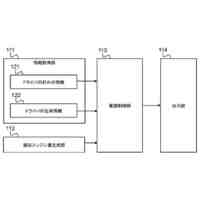
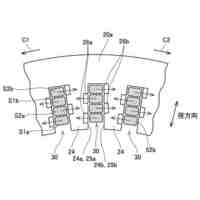
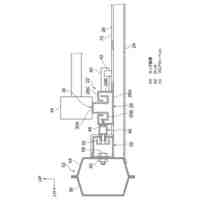
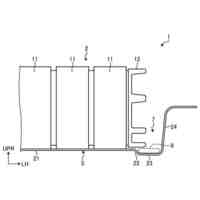
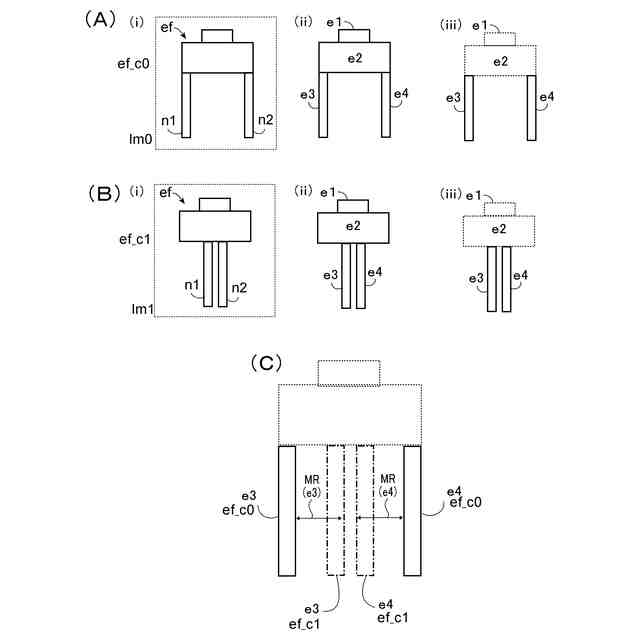
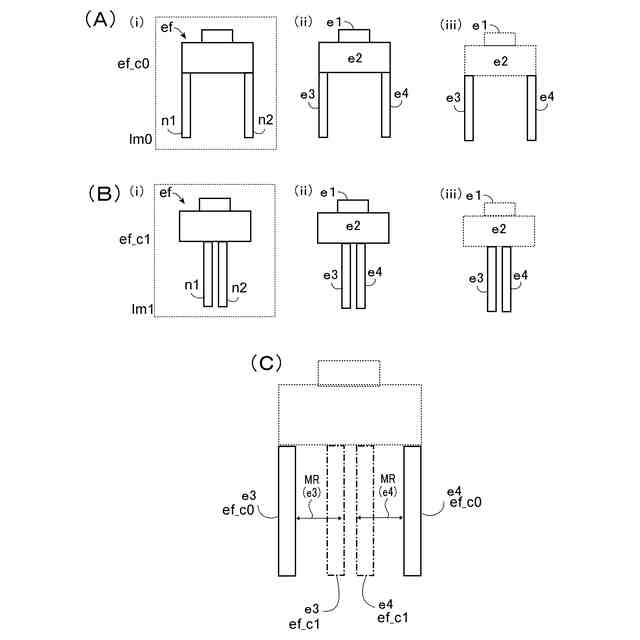
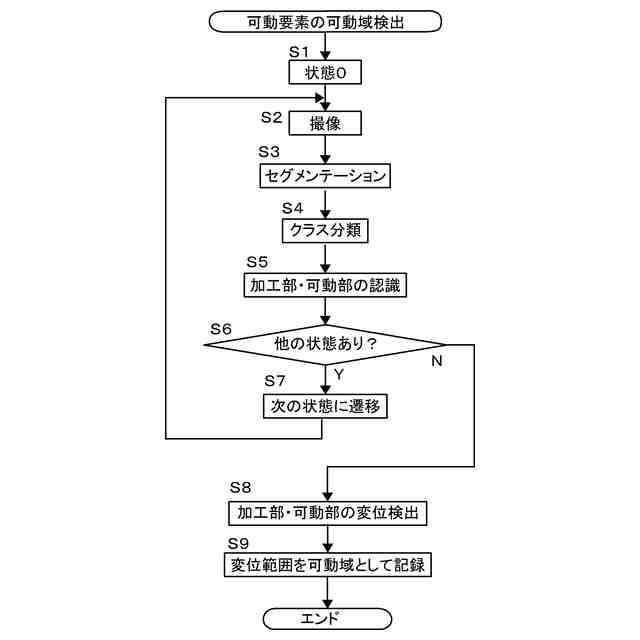
上記に於いて、「エンドエフェクタ」とは、既に触れた如く、ロボットアームの先端に装着されて或る物に対して或る種の加工や操作を実行するよう構成された装置である。エンドエフェクタは、典型的には、加工又は操作対象となる物に何等かの処置を施すための構成要素(加工部、可動部など)を有し、ロボット側から与えられた制御指令に対応して構成要素が異なる状態を取り得ることとなる。「撮像手段」は、エンドエフェクタの像を撮影するカメラ等であってよい。「要素認識手段」と「可動域検出手段」とは、コンピュータ装置に於けるプログラムに従った作動により実現されてよい。要素認識手段は、具体的には、例えば、まず、撮像手段にて撮像されたエンドエフェクタの画像に於いて任意の画像セグメンテーション技術を用いて、エンドエフェクタに於ける構成要素毎の像を認識し、認識された構成要素が如何なる機能の構成要素であるか(例えば、可動の爪構造、サーボモータ、アームなど)を任意のクラス分類の手法を用いて認識するよう構成される。可動域検出手段は、任意のエンドエフェクタについて、それが取り得る状態毎に撮像手段で撮影されたエンドエフェクタの画像から要素認識手段により認識された構成要素の像の、エンドエフェクタの互いに取り得る状態間での変位(位置の変化)を検出するよう構成される。そして、エンドエフェクタに於ける或る構成要素について変位が検出されると、可動域検出手段は、その構成要素の変位した範囲をその構成要素の可動域として検出するよう構成されてよい。なお、任意のエンドエフェクタのそれが取り得る状態とは、そのエンドエフェクタをロボットに装着した際に、ロボット側からの種々の制御指令がエンドエフェクタに与えた場合のそのエンドエフェクタの種々の状態である。
【0008】
上記の本発明のシステムの構成によれば、任意のエンドエフェクタを、それに種々の制御指令を与えた場合のそれぞれの状態で撮像手段に撮像させることにより、そのエンドエフェクタの構成要素に可動のものがあるか否か、可動であるときには、その可動域が自動的に検出され、これにより、エンドエフェクタがどのように動くのかがロボットアーム上で作動せずに簡便に把握できることとなる。
【0009】
上記の構成に於いて、エンドエフェクタに於いて複数の構成要素が可動する場合には、それぞれの構成要素について可動域が検出されてよい。或るエンドエフェクタに対して与えられる制御指令が二つ以上であるときには、制御指令の変更毎の構成要素の変位が検出されて、制御指令の変更毎の可動域が検出されてよい。異なる制御指令が与えられても構成要素のいずれも変位しない場合(例えば、先端部の電磁力のON/OFFの切換など)、構成要素の可動域がないことが検出されてよい。
【発明の効果】
【0010】
かくして、上記の本システムの構成によれば、エンドエフェクタがどのように動くのかをロボット上で実際に動かさずに把握でき或いは記録できることとなり、動きがわからない状態でロボット上で作動することが回避でき、より安全である。また、本発明のシステムでは、エンドエフェクタを撮影手段で撮影した画像から構成要素の可動域を検出するので、例えば、3次元の点群データを用いて構造を把握する場合よりも、より低い計算負荷にて、エンドエフェクタがどのように動くのかを把握できる点でも有利である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
方法
12日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
自動車
6日前
トヨタ自動車株式会社
モータ
5日前
トヨタ自動車株式会社
ロータ
1日前
トヨタ自動車株式会社
減圧弁
1日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
モータ
7日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
診断装置
5日前
トヨタ自動車株式会社
蓄電装置
11日前
トヨタ自動車株式会社
記録装置
5日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
判定装置
6日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
コネクタ
1日前
トヨタ自動車株式会社
ステータ
6日前
トヨタ自動車株式会社
熱交換器
1日前
トヨタ自動車株式会社
車両構造
11日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
評価装置
4日前
トヨタ自動車株式会社
接続構造
4日前
トヨタ自動車株式会社
駆動装置
8日前
トヨタ自動車株式会社
監視装置
5日前
トヨタ自動車株式会社
電動車両
5日前
トヨタ自動車株式会社
車両用灯具
11日前
トヨタ自動車株式会社
燃焼ノズル
4日前
トヨタ自動車株式会社
電池パック
13日前
トヨタ自動車株式会社
電気自動車
13日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ