TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116144
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2025090027,2022092314
出願日
2025-05-29,2022-06-07
発明の名称
制御装置、ステアリングホイール、車両、制御方法、及び制御プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B62D
1/04 20060101AFI20250731BHJP(鉄道以外の路面車両)
要約
【課題】本開示は、手動運転への移行に必要な操作を示すスムーズな誘導を行うことができる制御装置、ステアリングホイール、車両、制御方法、及び制御プログラムを提供することを目的とする。
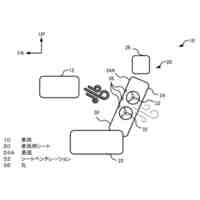
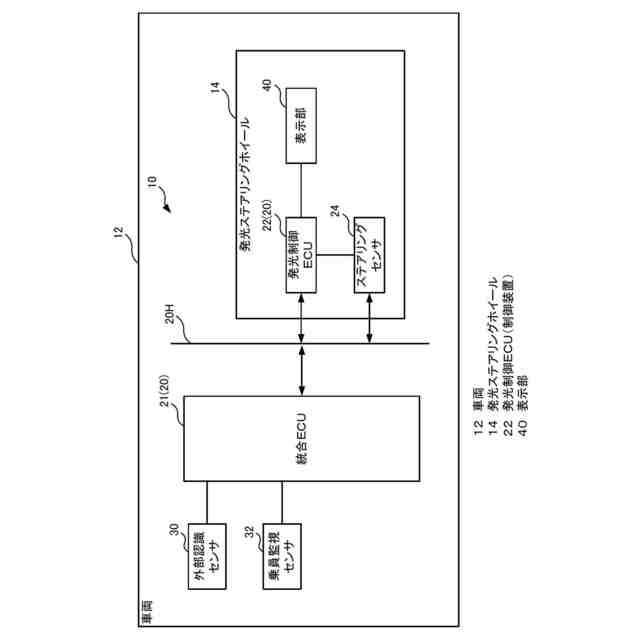
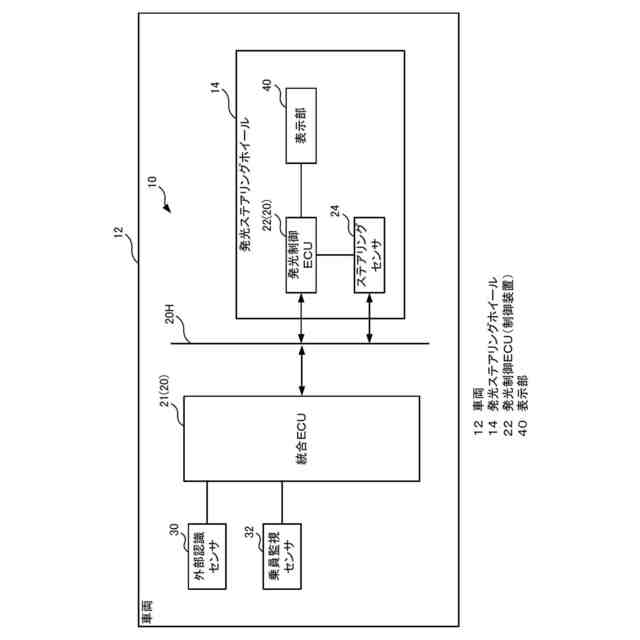
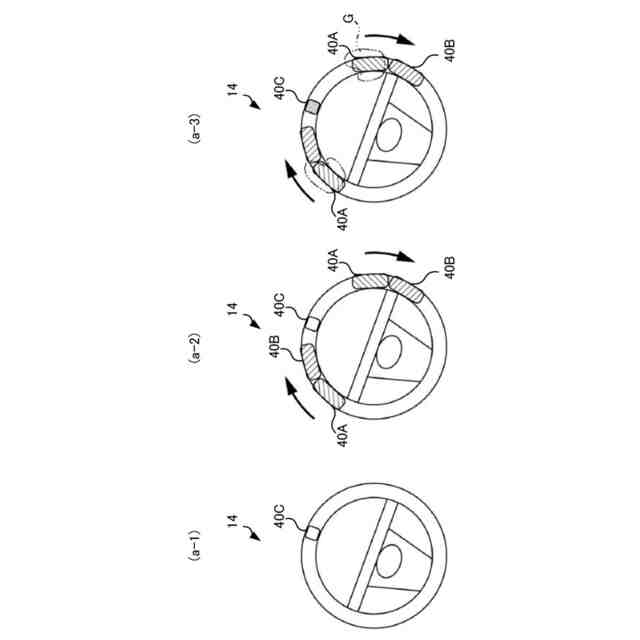
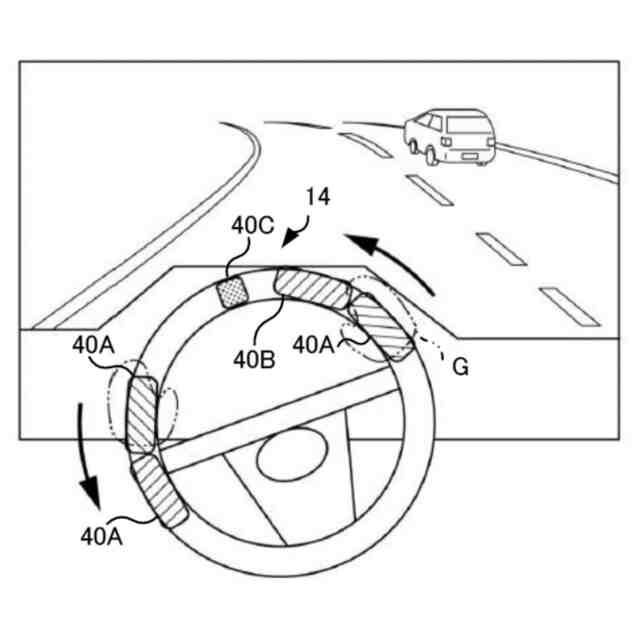
【解決手段】制御装置は、自動運転から手動運転への移行時に、ユーザが把持すべきステアリングホイールの把持位置を表示可能な表示部を制御する制御部を備え、前記表示部は、自動運転及び手動運転の状態遷移を識別するための遷移通知表示部分を有し、前記制御部は、表示させた前記把持位置とは異なる位置をユーザが把持して手動運転に状態遷移した場合に、前記遷移通知表示部分をユーザが把持した位置に応じた位置に調整する。
【選択図】図1
特許請求の範囲
【請求項1】
自動運転から手動運転への移行時に、ユーザが把持すべきステアリングホイールの把持位置を表示可能な表示部を制御する制御部を備え、
前記表示部は、自動運転及び手動運転の状態遷移を識別するための遷移通知表示部分を有し、
前記制御部は、表示させた前記把持位置とは異なる位置をユーザが把持して手動運転に状態遷移した場合に、前記遷移通知表示部分をユーザが把持した位置に応じた位置に調整する、
制御装置。
続きを表示(約 830 文字)
【請求項2】
車両の走行予定経路を取得する取得部をさらに備え、
前記制御部は、前記把持位置を前記走行予定経路に基づいて決定する、
請求項1に記載の制御装置。
【請求項3】
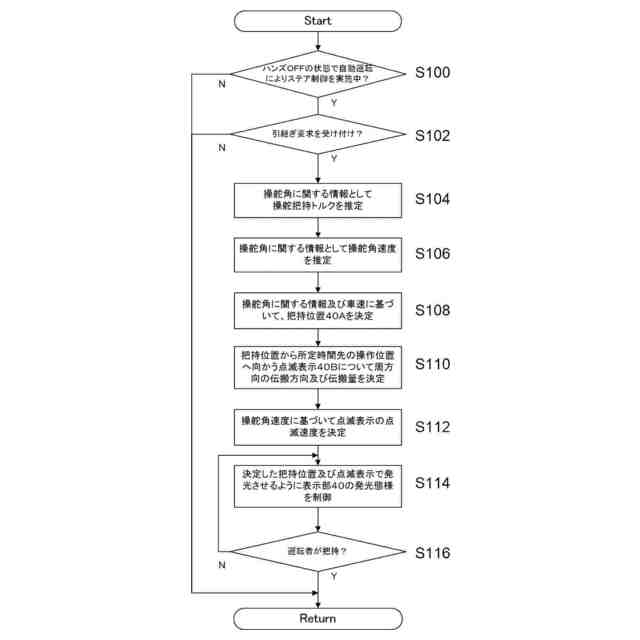
前記制御部は、前記走行予定経路から算出される前記ステアリングホイールの操舵角に関する情報及び車速に基づいて前記把持位置を決定する請求項2に記載の制御装置。
【請求項4】
前記制御部は、操舵の所定時間先の操作位置を前記表示部に表示させる請求項1に記載の制御装置。
【請求項5】
前記制御部は、前記把持位置から前記所定時間先の操作位置へ向かう点滅表示を前記表示部に表示させる請求項4に記載の制御装置。
【請求項6】
前記点滅表示は、車両の走行予定経路における所定時間先の前記ステアリングホイールの操作速度に基づいて点滅速度を決定する請求項5に記載の制御装置。
【請求項7】
前記制御部は、前記点滅表示を表示させる制御の後に、操舵中の操舵角と、更新された前記走行予定経路の操舵角とが異なる場合に、更新された所定時間先の前記操作速度に基づいて前記点滅表示の点滅速度を再計算し、点滅速度を切り替える請求項6に記載の制御装置。
【請求項8】
前記制御部は、ユーザの把持が一方の手による把持であった場合に、他方の手で把持した場合の位置を推定し、前記遷移通知表示部分を推定したユーザが把持した位置に応じた位置に調整する請求項1に記載の制御装置。
【請求項9】
前記制御部は、前記ステアリングホイールの周方向に沿って設けられた前記表示部を制御する請求項1に記載の制御装置。
【請求項10】
車両に搭載された前記ステアリングホイールであって、
請求項1に記載の制御装置を備えるステアリングホイール。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車内に設けられた表示部の制御を行う制御装置、ステアリングホイール、車両、制御方法、及び制御プログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、運転者に与える違和感を抑制してステアリングホイールの回転角を認識させる技術が開示されている。この技術では、変化制御部は、舵角制御部による制御が第2の制御から第1の制御へ切り替えられる場合において切り替えが実行される前に、外観変化部の動作を制御する。これにより、変化制御部は、ステアリングホイールの外観を、切れ角に応じて予め定められた外観に変化させるようにしている。
【0003】
特許文献2には、ステアリング操舵によるホイール角の変化量を認識できるようにして、駐車時の運転支援を行うことができるステアリングハンドルに関する技術が開示されている。この技術では、駐車位置への移動時には、車両に設けられたカメラによる画像の画像処理により駐車位置へ導く目標車輪操舵角を算出し、算出した目標車輪操舵角の方向を表示装置に表示している。
【0004】
特許文献3には、自動運転から手動運転への運転引継ぎに際して、運転者にステアリングホイールの把持位置を適正に指示しながら把持の誤検出を防止する技術が開示されている。この技術の自動運転システムは、走行環境の認識結果(自車両の進行方向の道路形状)と運転者の状態の検出結果(運転者の手の状態、及び運転者の顔の向きの検出結果)とに基づいてステアリングホイールの把持位置を決定する把持位置決定部を備えている。
【先行技術文献】
【特許文献】
【0005】
特開2017-094964号公報
特開2017-065276号公報
特開2021-049894号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
先行技術には、自動運転から手動運転への運転の移行に際して、道路形状及び運転者の状態をもとに決定した把持位置を表示して誘導することが記載されている。しかし、先行技術では、周辺環境を考慮した把持位置とはなっていない。また、先行技術では、把持した後の操作量や操作速度の加減をどのようにして操作するかについては考慮されていない。
【0007】
本開示は、手動運転への移行に必要な操作を示すスムーズな誘導を行うことができる制御装置、ステアリングホイール、車両、制御方法、及び制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1に記載の制御装置は、自動運転から手動運転への移行時に、ユーザが把持すべきステアリングホイールの把持位置を表示可能な表示部を制御する制御部を備え、前記表示部は、自動運転及び手動運転の状態遷移を識別するための遷移通知表示部分を有し、前記制御部は、表示させた前記把持位置とは異なる位置をユーザが把持して手動運転に状態遷移した場合に、前記遷移通知表示部分をユーザが把持した位置に応じた位置に調整する。
【0009】
請求項1に記載の制御装置は、誘導とは異なる位置を把持した場合でも、把持した位置に応じて遷移通知表示部分を調整し、スムーズに誘導できる。
【0010】
請求項2に記載の制御装置は、請求項1に記載の制御装置において、車両の走行予定経路を取得する取得部をさらに備え、前記制御部は、前記把持位置を前記走行予定経路に基づいて決定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
15日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
膜体
17日前
トヨタ自動車株式会社
車両
29日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
方法
29日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
電池
3日前
トヨタ自動車株式会社
モータ
10日前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
減圧弁
4日前
トヨタ自動車株式会社
光電極
2日前
トヨタ自動車株式会社
充電器
1か月前
トヨタ自動車株式会社
移動体
1か月前
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
充電器
29日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
自動車
9日前
トヨタ自動車株式会社
ロータ
4日前
トヨタ自動車株式会社
モータ
29日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
評価装置
7日前
トヨタ自動車株式会社
電源装置
1か月前
トヨタ自動車株式会社
駆動装置
1か月前
トヨタ自動車株式会社
コネクタ
4日前
トヨタ自動車株式会社
熱交換器
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ