TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025116743
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011351
出願日
2024-01-29
発明の名称
モータ制御装置、モータ駆動制御装置、モータ制御方法
出願人
ミネベアミツミ株式会社
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
主分類
H02P
29/024 20160101AFI20250801BHJP(電力の発電,変換,配電)
要約
【課題】発生している複数の種類の異常種別を回転速度信号により特定する。
【解決手段】モータ40の目標回転速度に基づいて、モータの駆動制御信号を生成する駆動制御信号生成部22と、モータ40の回転位置検出信号に基づいて、モータ40の回転速度に応じたデューティ比のパルス信号である回転速度信号を生成する回転速度信号算出部24と、モータから取得される複数の種類のモータの異常判定の条件値について、条件値が所定の閾値に到達したか否かを判定し、条件値が所定の閾値に到達したと判定された場合に、条件値の種類ごとに異なる値の組み合わせに応じて設定されるデューティ比のパルス信号である異常判定信号を出力する異常判定処理部25と、異常判定信号が出力されない場合に回転速度信号を出力し、異常判定信号が出力された場合に回転速度信号と異常判定信号とを出力する信号出力部26と、を備える。
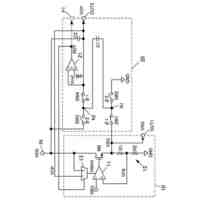
【選択図】図1
特許請求の範囲
【請求項1】
モータの目標回転速度に基づいて、前記モータの駆動制御信号を生成する駆動制御信号生成部と、
前記モータの回転位置検出信号に基づいて、前記モータの回転速度に応じたデューティ比のパルス信号である回転速度信号を生成する回転速度信号算出部と、
前記モータから取得される複数の種類の前記モータの異常判定の条件値について、前記条件値が所定の閾値に到達したか否かを判定し、前記条件値が前記閾値に到達したと判定された場合に、前記条件値の種類ごとに異なる値の組み合わせに応じて設定されるデューティ比のパルス信号である異常判定信号を出力する異常判定処理部と、
前記異常判定処理部から前記異常判定信号が出力されない場合に前記回転速度信号算出部が生成した前記回転速度信号を出力し、前記異常判定信号が出力された場合に前記回転速度信号と前記異常判定処理部から出力された前記異常判定信号とを出力する信号出力部と、
を備える、
モータ制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記信号出力部は、前記異常判定信号が出力された場合に、前記回転速度信号の高電圧信号の期間に前記異常判定信号の高電圧信号の期間を加算して1つの高電圧信号として出力する、
請求項1に記載のモータ制御装置。
【請求項3】
前記異常判定処理部は、所定の異常判定周期ごとに前記条件値が前記閾値に到達したか否かを判定し、
前記条件値が前記閾値に到達したと判定された後に前記条件値が前記閾値を満たさなくなった場合に、前記異常判定信号の出力を停止する、
請求項1または2に記載のモータ制御装置。
【請求項4】
前記異常判定処理部は、所定の異常判定周期ごとに前記条件値が前記閾値に到達したか否かを判定し、
前記閾値に到達した前記条件値が、直前の前記異常判定周期で前記閾値に到達した前記条件値と異なる場合には、異常種別の数が最も多い最新の前記異常種別の組み合わせによる前記異常判定信号を所定の時間維持する、
請求項1または2に記載のモータ制御装置。
【請求項5】
前記条件値の種類は、前記モータの電流値、電圧値、前記回転速度に基づく値である、
請求項1に記載のモータ制御装置。
【請求項6】
モータの目標回転速度に基づいて、前記モータの駆動制御信号を生成する駆動制御信号生成部と、
前記駆動制御信号に基づいて前記モータを駆動する駆動回路と、
前記モータの回転位置検出信号に基づいて、前記モータの回転速度に応じたデューティ比のパルス信号である回転速度信号を生成する回転速度信号算出部と、
前記モータから取得される複数の種類の前記モータの異常判定の条件値について、前記条件値が所定の閾値に到達したか否かを判定し、前記条件値が前記閾値に到達したと判定された場合に、前記条件値の種類ごとに異なる値の組み合わせに応じて設定されるデューティ比のパルス信号である異常判定信号を生成する異常判定処理部と、
前記異常判定処理部から前記異常判定信号が生成されない場合に前記回転速度信号算出部が生成した前記回転速度信号を出力し、前記異常判定信号が生成された場合に前記回転速度信号と前記異常判定処理部から出力された前記異常判定信号とを出力する信号出力部と、
を備える、
モータ駆動制御装置。
【請求項7】
モータの目標回転速度に基づいて、前記モータの駆動制御信号を生成するステップと、
前記モータの回転位置検出信号に基づいて、前記モータの回転速度に応じたデューティ比のパルス信号である回転速度信号を生成するステップと、
前記モータから取得される複数の種類の前記モータの異常判定の条件値について、前記条件値が所定の閾値に到達したか否かを判定し、前記条件値が前記閾値に到達したと判定された場合に、前記条件値の種類ごとに異なる値の組み合わせに応じて設定されるデューティ比のパルス信号である異常判定信号を出力するステップと、
前記異常判定信号が出力されない場合に前記回転速度信号を出力し、前記異常判定信号が出力された場合に前記回転速度信号と前記異常判定信号とを出力するステップと、
を実行する、
モータ制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置、モータ駆動制御装置、モータ制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
一般に、サーバ装置などの機器の冷却に用いられるファンのモータなどのモータの駆動制御を行うモータ駆動制御装置において、モータの回転速度を外部機器に知らせるための回転速度信号を、回転数に比例した回転速度信号の周波数を所定周波数分遷移させてモータの異常を外部機器に知らせる技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6883760号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、例えば、複数の種類の異常種別が同時期に発生した場合に、発生している複数の種類の異常種別の組み合わせを特定することができない場合があった。
【0005】
本発明は、上述の課題を一例とするものであり、発生している複数の種類の異常種別を回転速度信号により特定することができるモータ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明に係るモータ制御装置は、モータの目標回転速度に基づいて、前記モータの駆動制御信号を生成する駆動制御信号生成部と、前記モータの回転位置検出信号に基づいて、前記モータの回転速度に応じたデューティ比のパルス信号である回転速度信号を生成する回転速度信号算出部と、前記モータから取得される複数の種類の前記モータの異常判定の条件値について、前記条件値が所定の閾値に到達したか否かを判定し、前記条件値が所定の閾値に到達したと判定された場合に、前記条件値の種類ごとに異なる値の組み合わせに応じて設定されるデューティ比のパルス信号である異常判定信号を出力する異常判定処理部と、前記異常判定処理部から前記異常判定信号が出力されない場合に前記回転速度信号算出部が生成した前記回転速度信号を出力し、前記異常判定信号が出力された場合に前記回転速度信号と前記異常判定処理部から出力された前記異常判定信号とを出力する信号出力部と、を備える。
【発明の効果】
【0007】
本発明に係るモータ制御装置によれば、発生している複数の種類の異常種別を回転速度信号により特定することができる。
【図面の簡単な説明】
【0008】
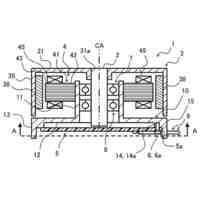
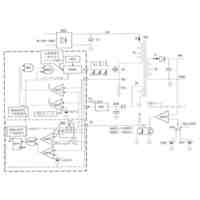
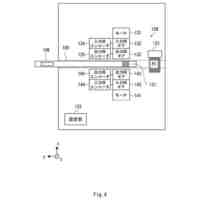
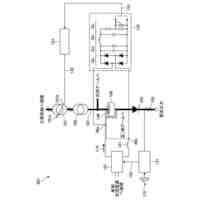
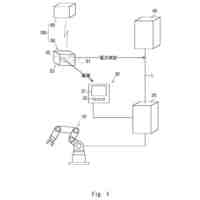
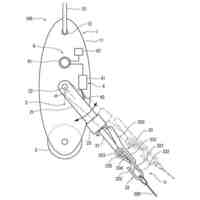
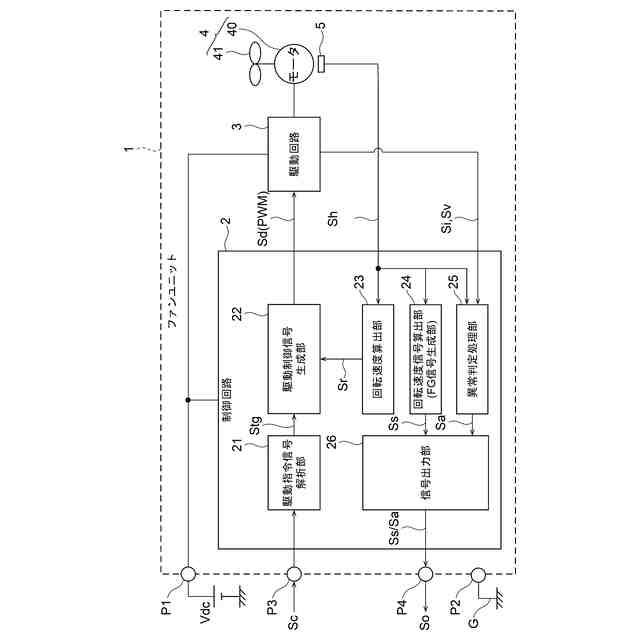
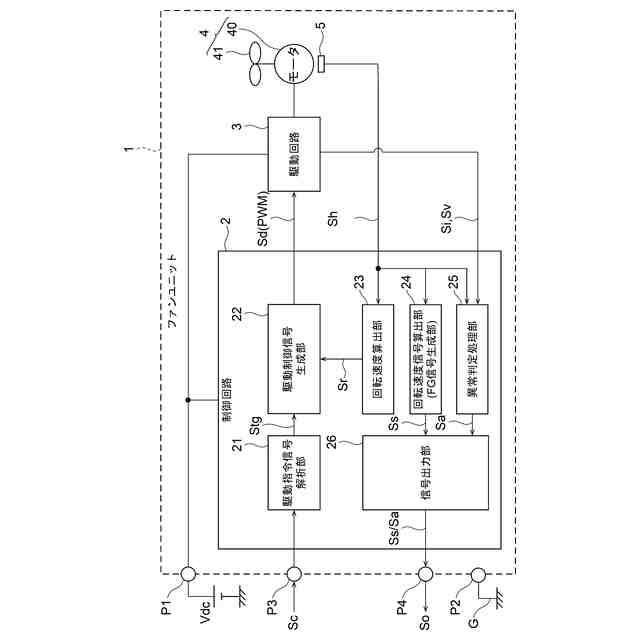
本発明の実施の形態に係るモータ駆動制御装置を備えるモータ装置の一例であるファンユニットの構成を概略的に示す機能ブロック図である。
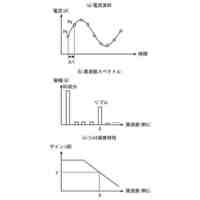
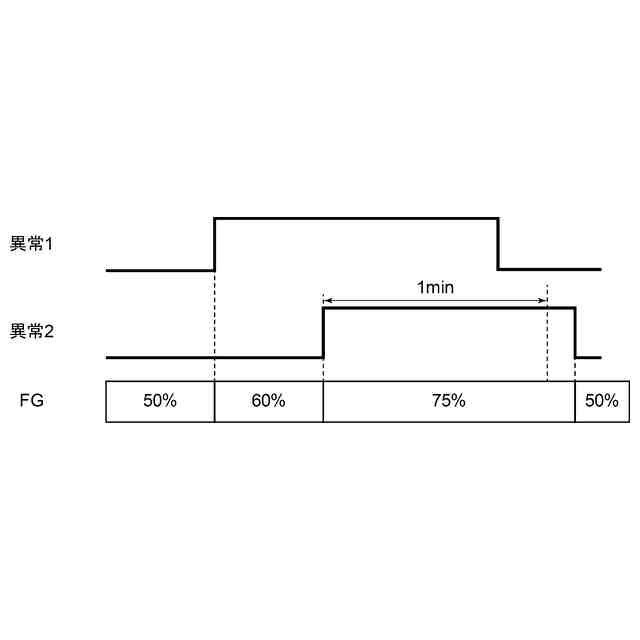
制御回路の信号出力部から出力される回転速度信号及び異常判定信号の波形の一例を示す図である。
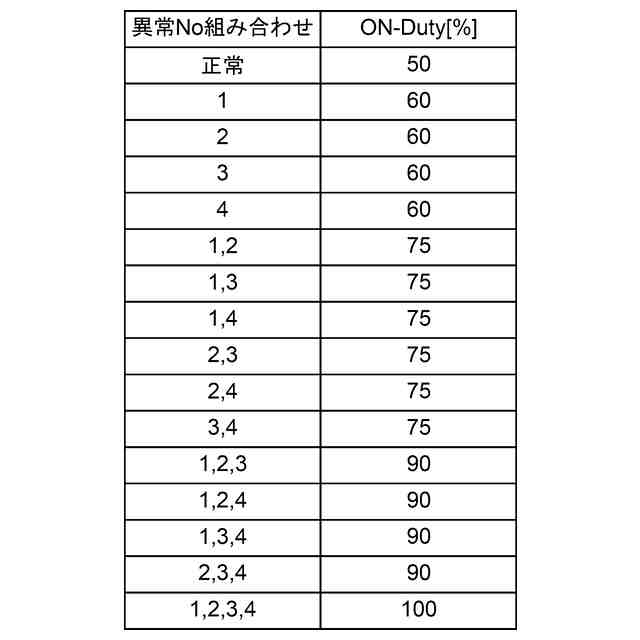
異常判定処理部が判定する異常種別の組み合わせと組み合わせに対応するデューティ比の一例を示す表である。
異常判定処理部が判定する異常種別の組み合わせと組み合わせに対応するデューティ比の一例を示す表である。
制御回路の信号出力部から出力される複数の異常判定信号の波形の組み合わせの一例を示す図である。
制御回路の信号出力部から出力される複数の異常判定信号の波形の組み合わせの別の一例を示す図である。
制御回路の信号出力部から出力される複数の異常判定信号の波形の組み合わせのさらに別の一例を示す図である。
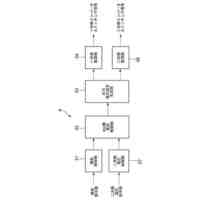
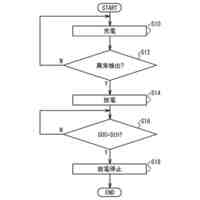
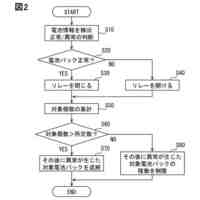
図1に示す制御回路における制御処理のフローチャートの一例である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態に係るモータ制御装置、モータ駆動制御装置、モータ制御方法について図面を参照しながら説明する。
【0010】
図1は、本発明の実施の形態に係るモータ駆動制御装置を備えるモータ装置の一例であるファンユニット1の構成を概略的に示す機能ブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
充電制御システム
10日前
ニデック株式会社
モータ
24日前
個人
発電装置
18日前
個人
電流制御形AC-DC電源
17日前
株式会社ナユタ
電源装置
10日前
個人
ステッピングモータ実習装置
1か月前
キヤノン株式会社
電源装置
18日前
スズキ株式会社
移動システム
10日前
トヨタ自動車株式会社
充電方法
1か月前
カヤバ株式会社
モータ制御装置
13日前
カヤバ株式会社
モータ制御装置
13日前
サンデン株式会社
電力変換装置
25日前
トヨタ自動車株式会社
駆動装置
20日前
サンデン株式会社
電力変換装置
25日前
個人
回転力発生装置
16日前
株式会社ダイヘン
給電装置
11日前
富士電機株式会社
整流装置
3日前
ダイハツ工業株式会社
グロメット
9日前
トヨタ自動車株式会社
電池システム
23日前
日産自動車株式会社
回転電機
20日前
ミツミ電機株式会社
電源回路
19日前
新電元工業株式会社
充電装置
1か月前
ダイハツ工業株式会社
充電システム
19日前
富士電機株式会社
電力変換装置
13日前
株式会社デンソー
携帯機
9日前
シャープ株式会社
冷蔵庫
25日前
株式会社豊田自動織機
電動圧縮機
23日前
トヨタ自動車株式会社
電力管理システム
23日前
ミネベアミツミ株式会社
回転機器
1か月前
株式会社アイシン
駆動装置
9日前
株式会社デンソー
電源装置
26日前
個人
延線補助具
16日前
住友電装株式会社
ワイヤハーネス
5日前
ミネベアミツミ株式会社
回転機器
1か月前
株式会社日立製作所
回転電機
1か月前
ミネベアミツミ株式会社
回転機器
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ