TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117562
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2025012257
出願日
2025-01-28
発明の名称
侵入に基づいた衝突回避
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250804BHJP(信号)
要約
【課題】本開示の特定の態様は、侵入に基づいた衝突回避に関する。
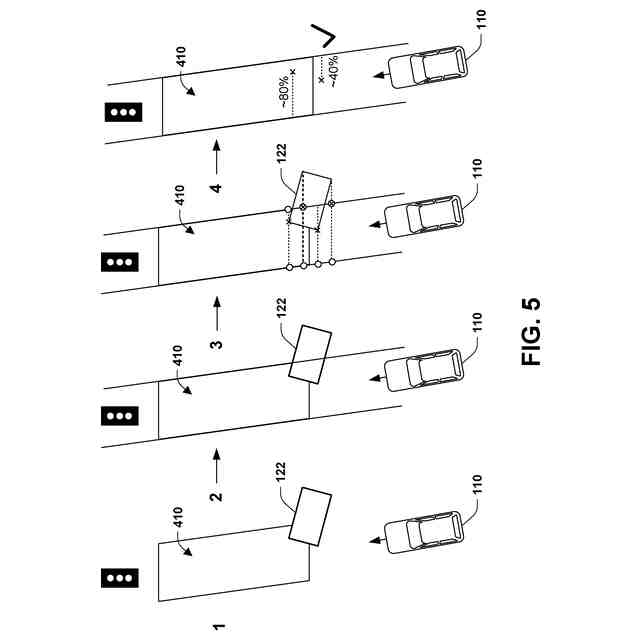
【解決手段】バウンディングボックスは、左のレーン線及び右のレーン線を備える交通レーン内のオブジェクトのサイズ及び位置を捕捉するように生成され得る。メトリックは、オブジェクトがレーンにおいて侵入する程度を捕捉するバウンディングボックスの1つ以上の頂点に基づいて計算される。頂点は、レーン線に投影され得、頂点と投影との間の距離が計算される。比は、頂点について、レーン幅に対する位置付けを捕捉する距離に基づいて決定され得る。比は、メトリックの根拠として分析及び利用され得る。次いで、メトリックは、少なくとも1つの閾値と比較され得る。メトリックが閾値を満たす場合、衝突回避応答がトリガされ得る。
【選択図】 図1
特許請求の範囲
【請求項1】
左のレーン線及び右のレーン線を備えるレーン内のオブジェクトのサイズ及び位置を捕捉するバウンディングボックスを生成することと、
前記バウンディングボックスの1つ以上の頂点に基づいて、前記オブジェクトが前記レーンにおいて侵入する程度を捕捉するメトリックを計算することと、
前記侵入のメトリックが閾値を満たすことを決定することと、
衝突回避応答をトリガすることと、
を含む、方法。
続きを表示(約 1,200 文字)
【請求項2】
前記侵入のメトリックを計算することは、
前記バウンディングボックスの前記1つ以上の頂点の各頂点を前記左のレーン線及び前記右のレーン線に投影することと、
前記左のレーン線及び右のレーン線までの各頂点の距離を決定することと、
前記左のレーン線及び前記右のレーン線に対する前記頂点の距離関係を表す各頂点についての比を生成することと、
を更に含む、請求項1に記載の方法。
【請求項3】
前記左のレーン線からの最大距離を有する頂点に関連付けられる第1の比を識別することと、
前記右のレーン線からの最大距離を有する頂点に関連付けられる第2の比を識別することと、
前記第1の比及び前記第2の比の最小値を前記侵入のメトリックとして選択することと、
を更に含む、請求項2に記載の方法。
【請求項4】
前記バウンディングボックスの生成は、交差点で前記レーン内の前記オブジェクトを捕捉する、請求項1に記載の方法。
【請求項5】
前記交差点の所定距離前後に前記右のレーン線及び前記左のレーン線を延ばすことを更に含む、請求項4に記載の方法。
【請求項6】
前記バウンディングボックスを生成する前に前記レーン内の前記オブジェクトを検出することを更に含む、請求項1に記載の方法。
【請求項7】
前記侵入のメトリックを計算することは、前記レーン内の利用可能スペースを捕捉する前記侵入のメトリックを計算することを含む、請求項1に記載の方法。
【請求項8】
前記衝突回避応答は、自動ブレーキを含む、請求項1に記載の方法。
【請求項9】
システムであって、
少なくとも1つのプロセッサと、
命令を含む、前記少なくとも1つのプロセッサに接続された少なくとも1つのメモリと、
を備え、前記命令は、前記少なくとも1つのプロセッサによって実行されると、前記システムに対して、
左のレーン線及び右のレーン線を備えるレーン内のオブジェクトのサイズ及び位置を捕捉するバウンディングボックスを生成させ、
前記バウンディングボックスの1つ以上の頂点に基づいて、前記オブジェクトが前記レーンにおいて侵入する程度を捕捉するメトリックを計算させ、
前記侵入のメトリックが閾値を満たすことを決定させ、
衝突回避応答をトリガさせる、システム。
【請求項10】
前記命令は更に、前記システムに対して、
前記バウンディングボックスの前記1つ以上の頂点の各頂点を前記左のレーン線及び前記右のレーン線に投影させ、
前記左のレーン線及び前記右のレーン線までの各頂点の距離を決定させ、
前記左のレーン線及び前記右のレーン線に対する前記頂点の距離関係を表す各頂点についての比を生成させる、請求項9に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書に記載される態様は、車両についての衝突回避に関する。より具体的には、態様は、交通レーン内の障害物を識別して、衝突を回避又は軽減するための対策をトリガすることに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
衝突回避システムは、車両の周囲を監視するセンサデータに基づいて車両間の衝突を防止するように設計されている。レーダ又は他のセンサは、他の車両、歩行者、及び障害物の近さに関するリアルタイムデータを収集し得る。収集されたデータは、潜在的な衝突リスクを評価するように分析され得る。脅威が識別される場合、衝突回避システムは、様々な方法、例えば、アラートのトリガ、又は車両ブレーキの作動などの補正動作の開始で介入し得る。
【発明の概要】
【0003】
一態様によれば、左のレーン線及び右のレーン線を備えるレーン内のオブジェクトのサイズ及び位置を捕捉するバウンディングボックスを生成することと、バウンディングボックスの1つ以上の頂点に基づいて、オブジェクトがレーンにおいて侵入する程度を捕捉するメトリックを計算することと、メトリックが閾値を満たすことを決定することと、衝突回避応答をトリガすることと、を含む、方法が開示される。
【0004】
別の態様によると、左のレーン線及び右のレーン線を備えるレーン内のオブジェクトのサイズ及び位置を捕捉するバウンディングボックスを生成することと、バウンディングボックスの各頂点を左のレーン線及び右のレーン線に投影することと、左のレーン線及び右のレーン線までの各頂点の距離を決定することと、左のレーン線及び右のレーン線に対する頂点の距離関係を表す各頂点についての比を生成することと、左のレーン線からの最大距離を有する頂点に関連付けられる第1の比及び右のレーン線からの最大距離を有する頂点に関連付けられる第2の比を識別することと、第1の比及び第2の比の最小値を侵入比として選択することと、侵入比が閾値を満たすことを決定することと、衝突回避応答をトリガすることと、を含む、方法が開示される。
【0005】
他の態様は、前述の方法に関連付けられるシステム、処理システムのプロセッサによって実行されると処理システムに方法を行わせる命令を備える非一時的なコンピュータ可読媒体、並びに前述の方法及び本明細書で更に記載されるものを行うコードを備えるコンピュータ可読記憶媒体において具現化されたコンピュータプログラム製品を提供する。
【0006】
以下の説明及び関連図面は、本開示の1つ以上の態様に関する特定の実例的な特徴を詳細に記載する。
【図面の簡単な説明】
【0007】
図面に記載される実施形態は本質的に、実例的で例示的なものであって、特許請求の範囲によって定められる主題を限定することを意図したものではない。以下の図面と併せて読むと、実例的な実施形態の以下の詳細な説明を理解することができ、当該図面では、同様の構造は、同様の参照番号を用いて示される。
【0008】
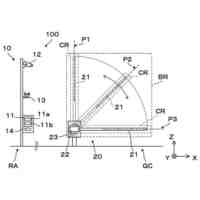
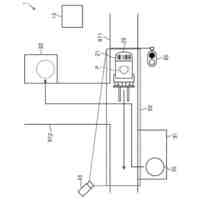
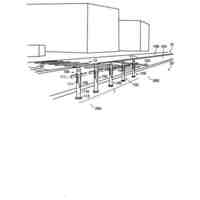
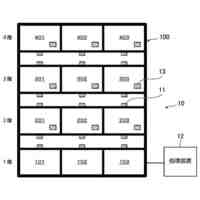
図1は、本明細書に示され記載される1つ以上の実施形態に係る侵入に基づいた回避の例示的な実装態様を描写する。
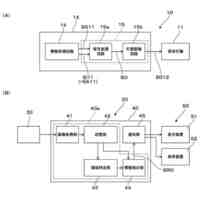
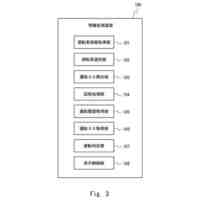
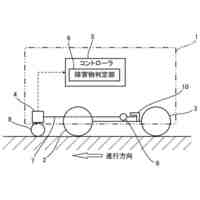
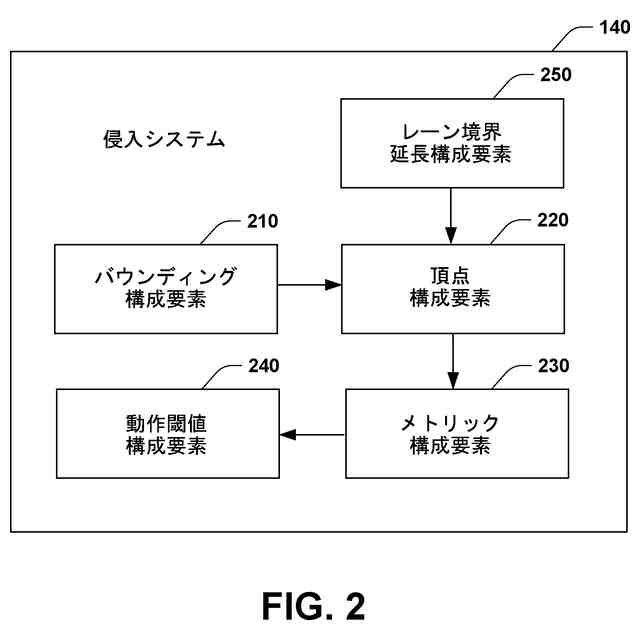
図2は、本明細書に示され記載される1つ以上の実施形態に係る例示的な侵入システムを示す。
図3は、本明細書に示され記載される1つ以上の実施形態に係るレーン障害物及び頂点計算を含む例示的なシナリオを描写する。
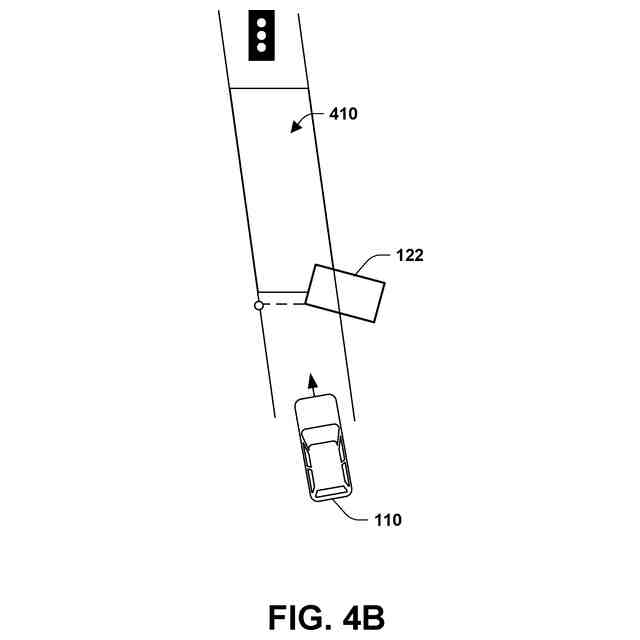
図4Aは、本明細書に示され記載される1つ以上の実施形態に係る例示的なレーン延長を示す。
図4Bは、本明細書に示され記載される1つ以上の実施形態に係る例示的なレーン延長を示す。
図5は、本明細書に示され記載される1つ以上の実施形態に係る交差点内のレーン障害物についての例示的な侵入システム動作を描写する。
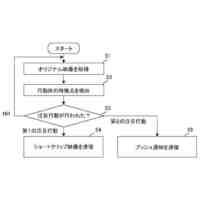
図6は、本明細書に示され記載される1つ以上の実施形態に係る衝突回避の例示的な方法のフロー図である。
図7は、どのようにオブジェクトがレーンを遮るかを記載するメトリックを決定する例示的な方法のフロー図である。
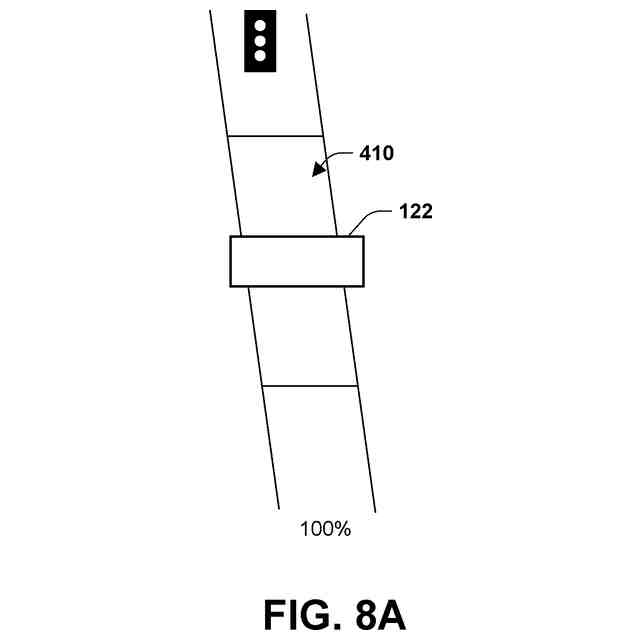
図8Aは、本明細書に示され記載される1つ以上の実施形態に係る様々なオブジェクト侵入を伴う例示的な交差点を示す。
図8Bは、本明細書に示され記載される1つ以上の実施形態に係る様々なオブジェクト侵入を伴う例示的な交差点を示す。
図8Cは、本明細書に示され記載される1つ以上の実施形態に係る様々なオブジェクト侵入を伴う例示的な交差点を示す。
図8Dは、本明細書に示され記載される1つ以上の実施形態に係る様々なオブジェクト侵入を伴う例示的な交差点を示す。
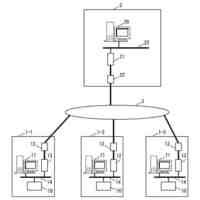
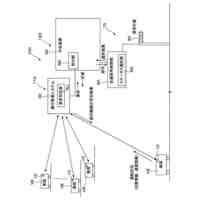
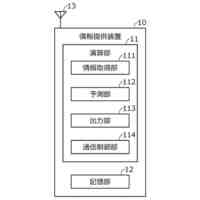
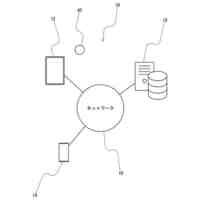
図9は、本明細書に示され記載される1つ以上の実施形態に係る、主題の開示の態様が行われ得る例示的な動作環境のブロック図である。
【発明を実施するための形態】
【0009】
本明細書に記載される態様は、レーン侵入の測定に基づいた衝突回避に関する、装置、方法、処理システム、及びコンピュータ可読媒体を提供する。
【0010】
従来の衝突回避システムは、レーダなどのセンサを利用して、別の車両、歩行者、又は障害物に対する車両の近さを決定する。しかしながら、レーダは、特に、密集した複雑な交通シナリオにおいて、相対的な位置を決定する際に不正確であり得る。不正確性は、偽陽性をもたらし得、当該偽陽性は、潜在的な衝突脅威が識別されるが存在しない状況を指す。別の言い方をすると、衝突回避システムは不必要に、警告を生成し得るか又は回避的な動作をトリガし得る。偽陽性は、いくつかの悪影響を及ぼし得、当該悪影響は、システム信頼性の信用の損失を含み、操作者がシステムを無視するか又はシステムをオフにすることや運転者の不注意をもたらし、道路及び他の重要なタスクに集中する運転者の能力を損なう。更に、偽陽性が頻繁に生じる場合、運転者は、警告に対して鈍感になり、衝突を回避するための真の警告に対して適切に応答せず、それによって、衝突回避システムの効果を低下させ得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
路面投影装置
1か月前
ニッタン株式会社
発信機
1か月前
個人
防犯に特化したアプリケーション
1か月前
ニッタン株式会社
発信機
7日前
ニッタン株式会社
発信機
9日前
ニッタン株式会社
発信機
1か月前
TOA株式会社
拡声放送システム
1か月前
トヨタ自動車株式会社
車両
8日前
東京都公立大学法人
液滴検出装置
1か月前
日本信号株式会社
情報提供システム
1か月前
株式会社アジラ
データ転送システム
1か月前
日本信号株式会社
信号情報システム
1か月前
株式会社JVCケンウッド
警報装置
1か月前
アズビル株式会社
建物管理システム
2か月前
個人
乗り物の移動を支援する方法及び装置
29日前
ホーチキ株式会社
異常報知設備
2か月前
株式会社JVCケンウッド
情報処理装置
2か月前
日本信号株式会社
交通信号制御システム
1か月前
個人
現示内容に関する情報放送機能付き信号機
17日前
トヨタ自動車株式会社
回避動作判別装置
1か月前
ホーチキ株式会社
火災検出システム
1か月前
ホーチキ株式会社
非常通報システム
2か月前
本田技研工業株式会社
運転評価装置
14日前
本田技研工業株式会社
情報提供装置
8日前
本田技研工業株式会社
情報提供装置
8日前
株式会社豊田自動織機
制御システム
1か月前
株式会社フィットネスワン
見守りシステム
3か月前
トヨタ自動車株式会社
障害物検知装置
1か月前
Adora株式会社
アプリ使用制御システム
2か月前
本田技研工業株式会社
保険料算出装置
14日前
ユニティガードシステム株式会社
警備監視システム
2か月前
株式会社アイシン
運転支援装置
1日前
能美防災株式会社
火災感知器窓部清掃システム
1か月前
トヨタ自動車株式会社
方法
21日前
個人
注意喚起システム及び注意喚起装置
1か月前
大和ハウス工業株式会社
住環境管理設備
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ