TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025128274
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2025095776,2023531367
出願日
2025-06-09,2022-02-04
発明の名称
列検出システム、列検出システムを備える農業機械、および、列検出方法
出願人
株式会社クボタ
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250826BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】撮像装置を用いて作物列または畝などの「列」を検出する技術では、日照条件などの外乱要因によって検出の精度が低下する場合がある。
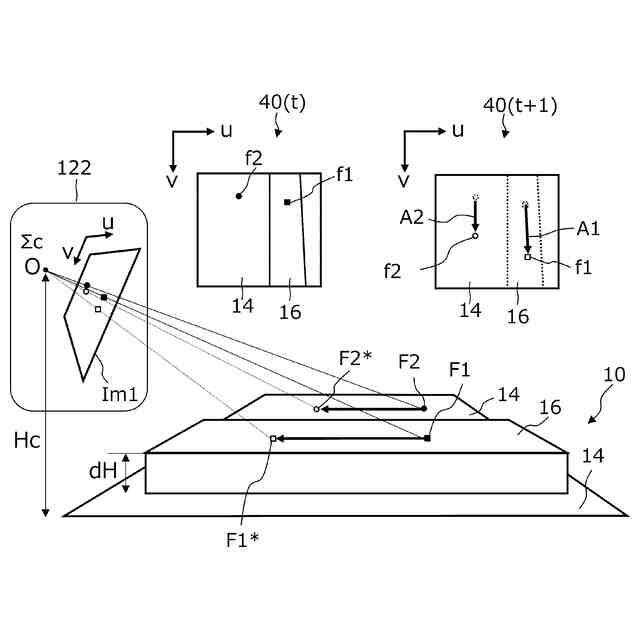
【解決手段】列検出システムは、農業機械に取り付けられ、農業機械が走行する地面を撮影して地面の少なくとも一部を含む時系列画像を取得する撮像装置と時系列画像の画像処理を行う処理装置と、を備える。処理装置は、時系列画像の異なる時刻に取得された複数の画像から、特徴点マッチングにより、複数の特徴点のそれぞれの、画像平面内における第1移動量を求め、複数の特徴点のそれぞれを、画像平面から、地面に対応する基準平面に透視投影し、前記第1移動量に基づいて基準平面内における各投影点の第2移動量を求め、前記第2移動量に基づいて、複数の特徴点の基準平面からの高さを推定して前記地面の畝を検出する。
【選択図】図32
特許請求の範囲
【請求項1】
農業機械に取り付けられ、前記農業機械が走行する地面を撮影して前記地面の少なくとも一部を含む時系列画像を取得する撮像装置と、
前記時系列画像の画像処理を行う処理装置と、
を備え、
前記処理装置は、
前記時系列画像の異なる時刻に取得された複数の画像から、特徴点マッチングにより、複数の特徴点のそれぞれの、画像平面内における第1移動量を求め、
前記複数の特徴点のそれぞれを、前記画像平面から、前記地面に対応する基準平面に透視投影し、前記第1移動量に基づいて前記基準平面内における各投影点の第2移動量を求め、
前記第2移動量に基づいて、前記複数の特徴点の前記基準平面からの高さを推定して前記地面の畝を検出し、
前記処理装置は、前記撮像装置から時系列カラー画像を取得し、
前記時系列カラー画像から、前記畝に沿う作物列の色を強調した、前記地面の上面視画像を生成し、
前記上面視画像を、前記色の指標値が閾値以上の第1画素と、前記指標値が前記閾値未満の第2画素とに分類し、
前記第1画素の前記指標値に基づいて、前記作物列のエッジラインの位置を決定し、
前記処理装置は、ユーザの選択に応じて前記畝の前記エッジラインの位置および前記作物列の前記エッジラインの位置の少なくとも一方に基づいて、目標経路を生成して出力する、検出システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、列検出システム、列検出システムを備える農業機械、および、列検出方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
圃場で使用されるトラクタなどの作業車両の自動化に向けた研究開発が進められている。例えば、精密な測位が可能なGNSS(Global Navigation Satellite System)などの測位システムを利用して自動操舵で走行する作業車両が実用化されている。自動操舵に加えて速度制御を自動で行う作業車両も実用化されている。
【0003】
また、圃場における作物の列(作物列)または畝をカメラなどの撮像装置を用いて検出し、検出した作物列または畝に沿って作業車両の走行を制御するビジョン・ガイダンスシステムが開発されつつある。
【0004】
特許文献1は、列状に形成された畝に作物が植えられた耕作地を畝に沿って走行する作業機を開示している。特許文献1は、車載カメラで耕作地を斜め上方から撮影して取得した原画像を二値化処理した後、平面射影変換画像を生成することを記載している。特許文献1が開示する技術では、平面射影変換画像を回転させることにより、向きが異なる多数の回転画像を生成し、畝と畝との間の作業通路を検出する。
【先行技術文献】
【特許文献】
【0005】
特開2016-208871号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
撮像装置を用いて作物列または畝などの「列」を検出する技術では、日照条件などの外乱要因によって検出の精度が低下する場合がある。
【0007】
本開示は、このような課題を解決することが可能な列検出システム、列検出システムを備える農業機械、および、列検出方法を提供する。
【課題を解決するための手段】
【0008】
本開示による列検出システムは、例示的で非限定的な実施形態において、農業機械に取り付けられ、前記農業機械が走行する地面を撮影して前記地面の少なくとも一部を含む時系列画像を取得する撮像装置と、前記時系列画像の画像処理を行う処理装置と、を備える。前記処理装置は、前記時系列画像の異なる時刻に取得された複数の画像から、特徴点マッチングにより、複数の特徴点のそれぞれの、画像平面内における第1移動量を求め、前記複数の特徴点のそれぞれを、前記画像平面から、前記地面に対応する基準平面に透視投影し、前記第1移動量に基づいて前記基準平面内における各投影点の第2移動量を求め、前記第2移動量に基づいて、前記複数の特徴点の前記基準平面からの高さを推定して前記地面の畝を検出する。
【0009】
本開示による農業機械は、例示的で非限定的な実施形態において、上記の列検出システムを備える農業機械であって、操舵輪を含む走行装置と、前記畝検出システムが決定した前記畝の位置に基づいて、前記操舵輪の操舵角を制御する自動操舵装置と、を備える。
【0010】
本開示による列検出方法は、例示的で非限定的な実施形態において、コンピュータに実装される列検出方法であって、農業機械に取り付けられた撮像装置から、前記農業機械が走行する地面を撮影した、前記地面の少なくとも一部を含む時系列画像を取得すること、前記時系列画像の異なる時刻に取得された複数の画像から、特徴点マッチングにより、複数の特徴点のそれぞれの、画像平面内における第1移動量を求めること、前記複数の特徴点のそれぞれを、前記画像平面から、前記地面に対応する基準平面に透視投影し、前記第1移動量に基づいて前記基準平面内における各投影点の第2移動量を求めること、前記第2移動量に基づいて、前記複数の特徴点の前記基準平面からの高さを推定して前記地面の畝を検出すること、をコンピュータに実行させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業車
21日前
株式会社クボタ
作業車
2日前
株式会社クボタ
作業機
27日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
トラクタ
21日前
株式会社クボタケミックス
伸縮継手
8日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
トラクタ
21日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
圃場作業機
22日前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
汚水処理装置
1か月前
株式会社クボタケミックス
管路更生工法および管更生部材
17日前
株式会社クボタケミックス
管路更生工法および管更生部材
17日前
株式会社クボタ
エンジン及びエンジンの診断方法
1か月前
株式会社クボタ
判定方法、判定システム、および判定プログラム
13日前
株式会社クボタ
作業機
9日前
株式会社クボタ
農機支援装置、マップ作成方法及びコンピュータプログラム
28日前
株式会社クボタ
乗用型田植機
今日
株式会社クボタケミックス
排水配管継手
28日前
株式会社クボタケミックス
排水配管構造
15日前
株式会社クボタケミックス
圃場水管理装置、圃場水管理システム、および圃場水管理方法
1か月前
株式会社クボタ
高さを設定可能な車軸の移動を検出するためのセンサを含む作業車
10日前
株式会社クボタ
列検出システム、列検出システムを備える農業機械、および、列検出方法
2日前
個人
ルアー
1か月前
個人
播種装置
27日前
個人
虫の生け捕り具
15日前
個人
植物栽培用培地
7日前
個人
釣り仕掛け処理具
2日前
個人
植木鉢用台
3日前
個人
プランターセット
1か月前
個人
生命力近親交配方法
1か月前
個人
養殖システム
22日前
株式会社シマノ
釣竿
23日前
岡部株式会社
浮魚礁
15日前
井関農機株式会社
作業車両
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ