TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025133263
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024031091
出願日
2024-03-01
発明の名称
運転支援システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/16 20060101AFI20250904BHJP(信号)
要約
【課題】走行記録に依存しない方法で、車両のドライバの運転操作内容に対し、適切なフィードバックを通知すること。
【解決手段】運転支援システムは、ドライバによる車両の手動運転の最中に、自動運転制御が行われると仮定した場合の車両制御内容を取得する。運転支援システムは、ドライバによる車両の手動運転の最中に、ドライバによる車両の運転操作の内容であるドライバ操作内容を取得する。運転支援システムは、車両制御内容とドライバ操作内容との比較の結果に基づいてドライバに運転操作に関するフィードバックを通知する。
【選択図】図3
特許請求の範囲
【請求項1】
車両のドライバに対する運転支援システムであって、
自動運転制御の機能を備える制御装置を備え、
前記制御装置は、前記ドライバによる前記車両の手動運転の最中に、
前記自動運転制御が行われると仮定した場合の車両制御内容を取得し、
前記ドライバによる前記車両の運転操作の内容であるドライバ操作内容を取得し、
前記車両制御内容と前記ドライバ操作内容との比較の結果に基づいて前記ドライバに前記運転操作に関するフィードバックを通知する
ように構成された
運転支援システム。
続きを表示(約 660 文字)
【請求項2】
請求項1に記載の運転支援システムであって、
前記ドライバ操作内容は、運転操作タイミングを含み、
前記車両制御内容は、車両制御タイミングを含み、
前記運転操作タイミングが、前記車両制御タイミングを含む第1範囲の外である場合、前記制御装置は、前記運転操作タイミングが適切でないことを示す前記フィードバックを通知する
運転支援システム。
【請求項3】
請求項1または2に記載の運転支援システムであって、
前記ドライバ操作内容は、運転操作量を含み、
前記車両制御内容は、車両制御量を含み、
前記運転操作量が、前記車両制御量を含む第2範囲の外である場合、前記制御装置は、前記運転操作量が適切でないことを示す前記フィードバックを通知する
運転支援システム。
【請求項4】
請求項1に記載の運転支援システムであって、
前記フィードバックに関する設定の少なくとも一部が、前記ドライバによって変更可能な
運転支援システム。
【請求項5】
車両のドライバに対する運転支援システムであって、
自動運転制御の機能を備える制御装置を備え、
前記制御装置は、前記ドライバによる前記車両の手動運転の最中に、
前記自動運転制御が行われると仮定した場合の車両制御内容を取得し、
前記車両制御内容を前記ドライバに通知する
ように構成された
運転支援システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両のドライバに対し、運転操作に関するフィードバックを通知する技術に関連する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、車両を運転しているドライバに対して運転操作に対して指導をする指導システムが開示されている。指導システムは、車両の現在の状態と過去の走行記録とに基づいて決定される操作内容を運転中のドライバに通知する。
【先行技術文献】
【特許文献】
【0003】
特開2020-140159号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
走行記録に基づくフィードバック(通知)は、対象車両の現実の状態に基づくものではないため、最適なフィードバックとは必ずしもいえない。特に、その走行路に関して蓄積された走行記録が少ない場合は、フィードバックの妥当性は低下することが予想される。
【0005】
本開示の1つの目的は、走行記録に依存しない方法で、ドライバの運転操作内容に対し、適切なフィードバックを通知することにある。
【課題を解決するための手段】
【0006】
第1の観点は、車両のドライバに対する運転支援システムに関連する。
運転支援システムは、自動運転制御の機能を備える制御装置を備える。
制御装置は、ドライバによる車両の手動運転の最中に、自動運転制御が行われると仮定した場合の車両制御内容を取得する。
制御装置は、ドライバによる車両の手動運転の最中に、ドライバによる車両の運転操作の内容であるドライバ操作内容を取得する。
制御装置は、車両制御内容とドライバ操作内容との比較の結果に基づいてドライバに運転操作に関するフィードバックを通知する。
【発明の効果】
【0007】
第1の観点によれば、運転支援システムは、ドライバによる車両の手動運転の最中に、自動運転制御が行われると仮定した場合の車両制御内容とドライバによる操作内容との比較に基づいて、ドライバにフィードバックを通知する。車両制御内容は、走行記録ではなく、現在の車両の状態に基づき決定されるため、走行記録に依存せずに、ドライバに適切なフィードバックを通知することが可能である。
【図面の簡単な説明】
【0008】
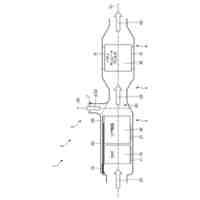
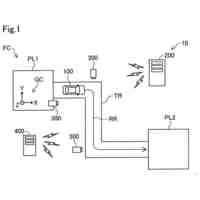
本実施の形態に係る運転支援システムの概要を説明するための概念図である。
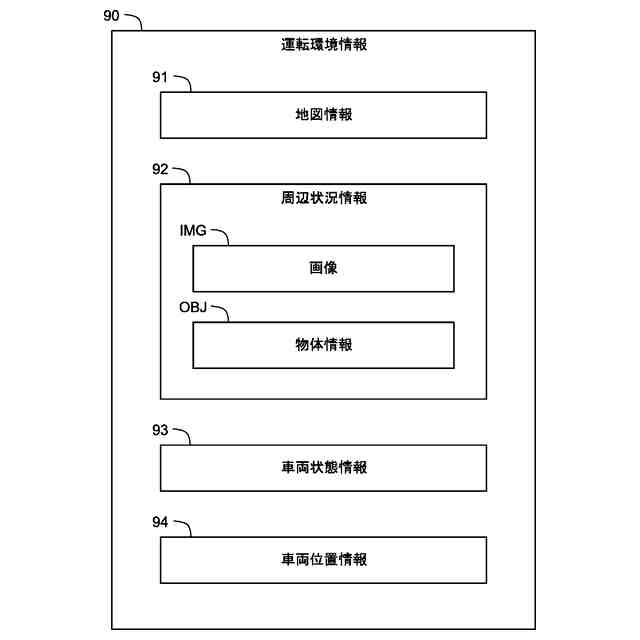
本実施の形態に係る運転環境情報の例を示すブロック図である。
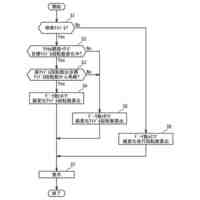
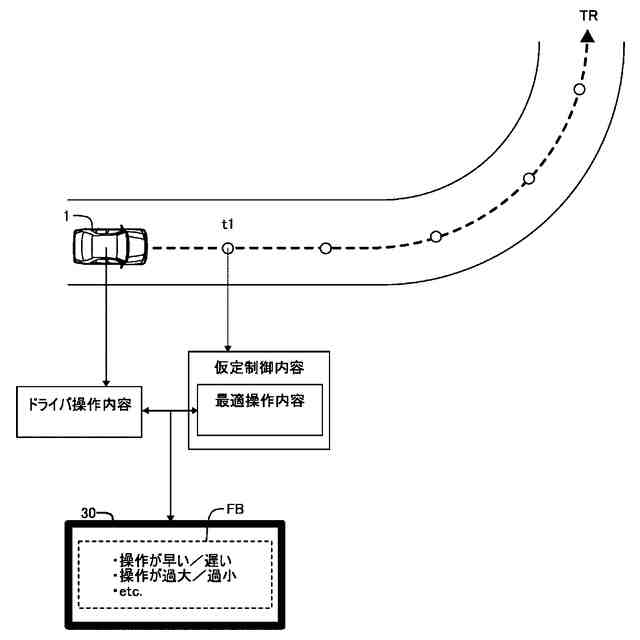
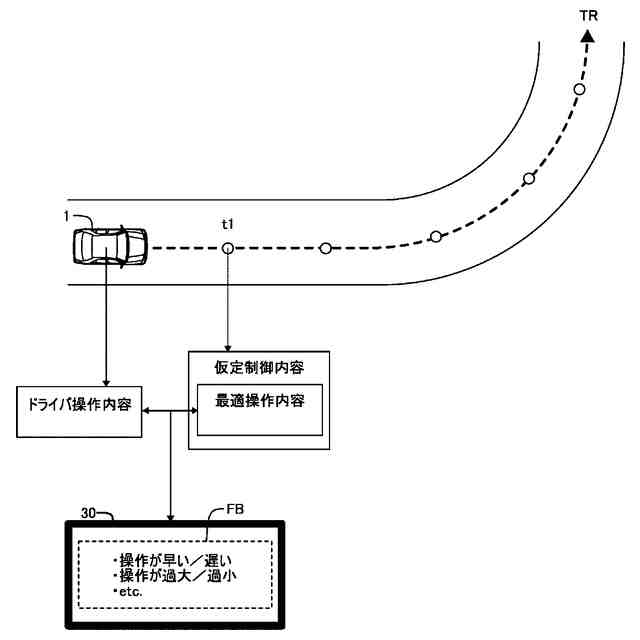
本実施の形態に係る運転支援システムがドライバにフィードバックを通知する様子を説明する概略図である。
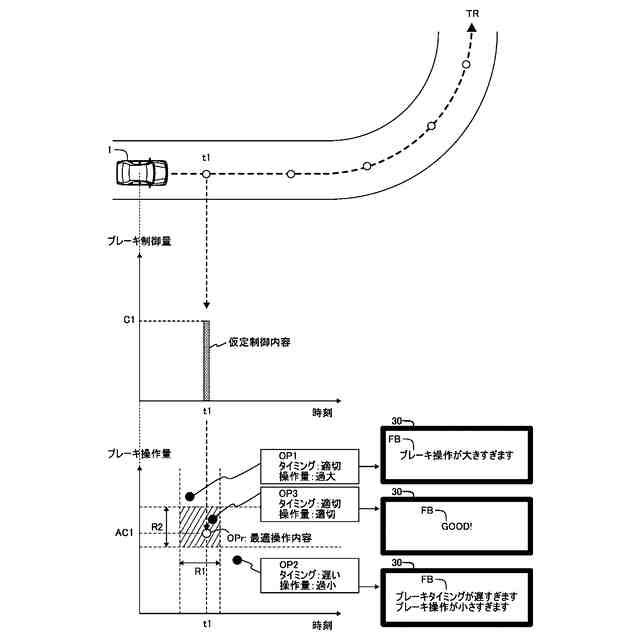
図3における状況をより詳細に表す図である。
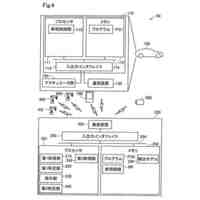
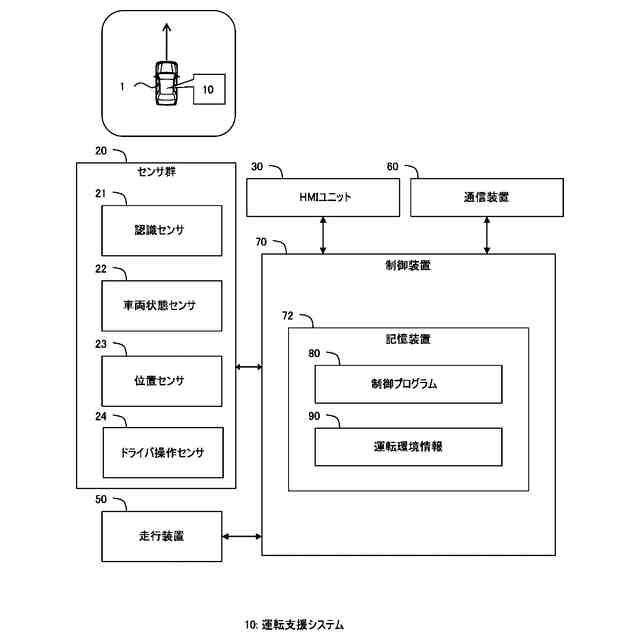
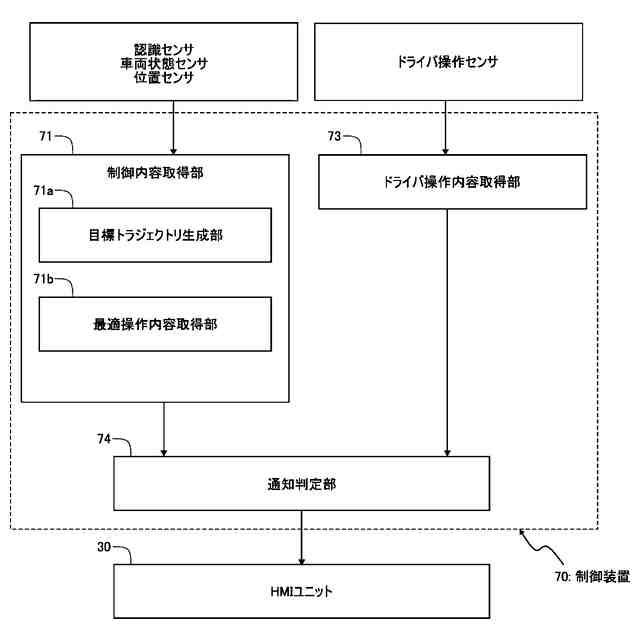
本実施の形態に係る運転支援システムの詳細な構成例を示すブロック図である。
本実施の形態に係る運転支援システムの変形例を示すブロック図である。
【発明を実施するための形態】
【0009】
添付図面を参照して、本開示の実施の形態を説明する。
【0010】
1.運転支援システム
図1は、本実施の形態に係る運転支援システム10の概要を説明するための概念図である。運転支援システム10は、車両1を制御する。典型的には、運転支援システム10は、車両1に搭載されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
装置
2日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
装置
2日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
電動車
20日前
トヨタ自動車株式会社
負極層
20日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
電動車
17日前
トヨタ自動車株式会社
水系電池
14日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
制御装置
17日前
トヨタ自動車株式会社
路側装置
13日前
トヨタ自動車株式会社
路側装置
13日前
トヨタ自動車株式会社
更新装置
13日前
トヨタ自動車株式会社
給電装置
17日前
トヨタ自動車株式会社
内燃機関
16日前
トヨタ自動車株式会社
車両構造
10日前
トヨタ自動車株式会社
積層電池
16日前
トヨタ自動車株式会社
電源装置
3日前
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
電動車両
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ