TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136898
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035826
出願日
2024-03-08
発明の名称
異常検知システム、異常検知装置及びビル設備管理装置
出願人
三菱電機ビルソリューションズ株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G05D
1/86 20240101AFI20250911BHJP(制御;調整)
要約
【課題】管理されるロボットに機種等が異なるものが混在していても、ロボットの異常判定精度の向上を図ることができる異常検知システム等を提供する。
【解決手段】本開示に係る異常検知システムは、ビル設備の稼働状況に基づいてトリガ信号を送信するトリガ信号送信部を有するビル設備管理装置と、トリガ信号を受信するトリガ信号受信部及びビル内を移動する複数のロボットのそれぞれから送信されてアンテナ装置が受信した電波をトリガ信号の受信に応じて取得する電波取得部とを有する異常検知装置と、を備える。複数の各ロボットは予め設定された1以上のグループのいずれかに属する。異常検知装置は、ロボットが属するグループを特定可能なロボット情報を取得するロボット情報取得部と、トリガ信号、電波強度及びロボット情報に基づきロボットの異常を判定する判定部と、をさらに備える。
【選択図】図1
特許請求の範囲
【請求項1】
ビル設備の稼働状況に基づいてトリガ信号を送信するトリガ信号送信部を有するビル設備管理装置と、
前記トリガ信号送信部が送信した前記トリガ信号を受信するトリガ信号受信部と、
ビル内を移動する複数のロボットのそれぞれから送信されてアンテナ装置が受信した電波を、前記トリガ信号受信部が前記トリガ信号を受信したことに応じて取得する電波取得部と、を有する異常検知装置と、を備え、
複数の前記ロボットのそれぞれは、予め設定された1以上のグループのいずれかに属し、
前記異常検知装置は、
前記ロボットが属する前記グループを特定可能なロボット情報を取得するロボット情報取得部と、
前記トリガ信号受信部が受信した前記トリガ信号、前記電波取得部が取得した電波の電波強度及び前記ロボット情報取得部が取得した前記ロボット情報に基づき前記ロボットの異常を判定する判定部と、をさらに備えた異常検知システム。
続きを表示(約 850 文字)
【請求項2】
同一機種の前記ロボットは、同一の前記グループに属する請求項1に記載の異常検知システム。
【請求項3】
前記判定部は、前記トリガ信号及び前記ロボット情報に対応する予想電波強度と、前記電波取得部が取得した電波強度とを比較することで、前記ロボットの異常を判定する請求項1又は請求項2に記載の異常検知システム。
【請求項4】
前記異常検知装置は、
前記トリガ信号及び前記ロボット情報に対応する前記予想電波強度を記憶する記憶部と、
前記電波取得部が取得した電波強度を用いて、前記記憶部に記憶されている前記予想電波強度を更新する更新部と、をさらに備えた請求項3に記載の異常検知システム。
【請求項5】
前記予想電波強度は、予め定めた電波強度の時系列変化についての情報である請求項3に記載の異常検知システム。
【請求項6】
前記予想電波強度は、予め定めた電波強度の時系列変化の大きさを示す閾値の情報であり、
前記判定部は、前記電波取得部が取得した電波強度の時系列変化の大きさが、前記閾値よりも大きい場合又は小さい場合に、前記ロボットの異常を判定する請求項3に記載の異常検知システム。
【請求項7】
前記判定部は、前記トリガ信号と前記電波取得部が取得した電波の電波強度とに基づき前記ロボットの異常の種別を判定する請求項1又は請求項2に記載の異常検知システム。
【請求項8】
前記ロボット情報は、前記ロボットの識別情報を含む請求項1又は請求項2に記載の異常検知システム。
【請求項9】
前記トリガ信号は、エレベータ装置のかごが戸開することを示す信号である請求項1又は請求項2に記載の異常検知システム。
【請求項10】
前記アンテナ装置は、前記かごの内部に設置されている請求項9に記載の異常検知システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、異常検知システム、異常検知装置及びビル設備管理装置に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
ビル設備の稼働状況に基づいてトリガ信号を送信するトリガ信号送信部を有するビル設備管理装置と、トリガ信号送信部が送信したトリガ信号を受信するトリガ信号受信部と、ビル内を移動するロボットが送信し、アンテナ装置が受信した電波を取得する取得部と、トリガ信号受信部が受信したトリガ信号と取得部が取得した電波の電波強度とに基づきロボットの異常を判定する判定部とを有する異常検知装置と、を備えた異常検知システムが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-163263号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に示されるようなシステムにおいては、ビル内を移動するロボットとして、機種、製造メーカー、仕様等が異なるロボットが混在している場合であっても同一の基準値によりロボットの異常を判定している。このため、管理されるロボットに機種、製造メーカー、仕様等が異なるものが混在している場合に、ロボットの異常判定精度が低下してしまうおそれがある。
【0005】
本開示は、このような課題を解決するためになされたものである。その目的は、管理されるロボットに機種、製造メーカー、仕様等が異なるものが混在している場合であっても、ロボットの異常判定精度の向上を図ることができる異常検知システム、異常検知装置及びビル設備管理装置を提供することにある。
【課題を解決するための手段】
【0006】
本開示に係る異常検知システムは、ビル設備の稼働状況に基づいてトリガ信号を送信するトリガ信号送信部を有するビル設備管理装置と、前記トリガ信号送信部が送信した前記トリガ信号を受信するトリガ信号受信部と、ビル内を移動する複数のロボットのそれぞれから送信されてアンテナ装置が受信した電波を、前記トリガ信号受信部が前記トリガ信号を受信したことに応じて取得する電波取得部と、を有する異常検知装置と、を備え、複数の前記ロボットのそれぞれは、予め設定された1以上のグループのいずれかに属し、前記異常検知装置は、前記ロボットが属する前記グループを特定可能なロボット情報を取得するロボット情報取得部と、前記トリガ信号受信部が受信した前記トリガ信号、前記電波取得部が取得した電波の電波強度及び前記ロボット情報取得部が取得した前記ロボット情報に基づき前記ロボットの異常を判定する判定部と、をさらに備える。
【0007】
本開示に係る異常検知装置は、ビル設備の稼働状況に基づいてトリガ信号を送信するビル設備管理装置が送信した前記トリガ信号を受信するトリガ信号受信部と、ビル内を移動する複数のロボットのそれぞれから送信されてアンテナ装置が受信した電波を、前記トリガ信号受信部が前記トリガ信号を受信したことに応じて取得する電波取得部と、を有する異常検知装置と、を備え、複数の前記ロボットのそれぞれは、予め設定された1以上のグループのいずれかに属し、前記ロボットが属する前記グループを特定可能なロボット情報を取得するロボット情報取得部と、前記トリガ信号受信部が受信した前記トリガ信号、前記電波取得部が取得した電波の電波強度及び前記ロボット情報取得部が取得した前記ロボット情報に基づき前記ロボットの異常を判定する判定部と、をさらに備える。
【0008】
本開示に係るビル設備管理装置は、ビル設備の稼働状況に基づいてトリガ信号を発動するトリガ発動部と、ビル内を移動する複数のロボットのそれぞれから送信されてアンテナ装置が受信した電波を、前記トリガ発動部が前記トリガ信号を発動したことに応じて取得する電波取得部と、を備え、複数の前記ロボットのそれぞれは、予め設定された1以上のグループのいずれかに属し、前記ロボットが属する前記グループを特定可能なロボット情報を取得するロボット情報取得部と、前記トリガ発動部が受信した前記トリガ信号、前記電波取得部が取得した電波の電波強度及び前記ロボット情報取得部が取得した前記ロボット情報に基づき前記ロボットの異常を判定する判定部と、をさらに備える
【発明の効果】
【0009】
本開示に係る異常検知システム、異常検知装置及びビル設備管理装置によれば、管理されるロボットに機種等が異なるものが混在している場合であっても、ロボットの異常判定精度の向上を図ることができるという効果を奏する。
【図面の簡単な説明】
【0010】
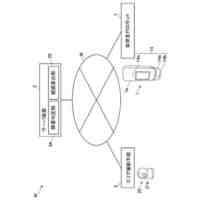
実施の形態1におけるロボット移動システムを示す図である。
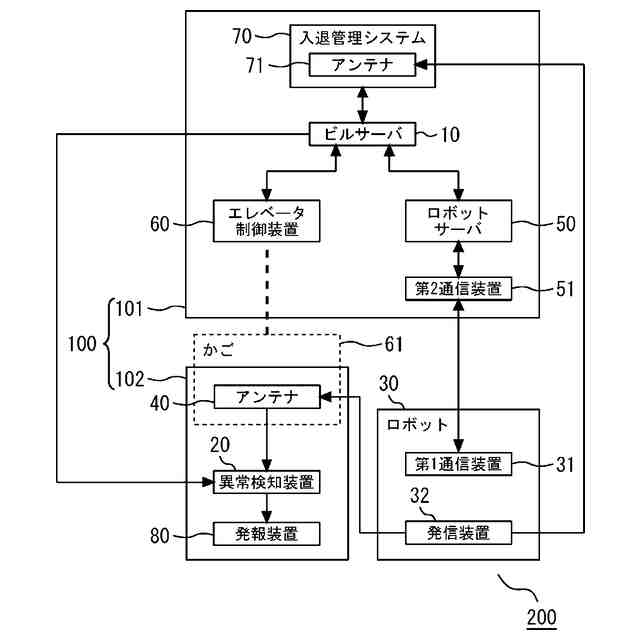
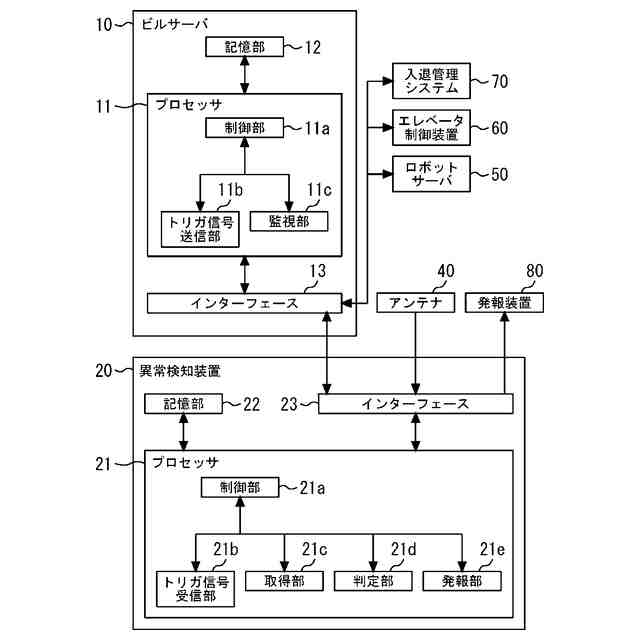
実施の形態1における異常検知システムの構成図である。
実施の形態1におけるロボットの乗場呼びに対する応答の制御を示すフローチャートである。
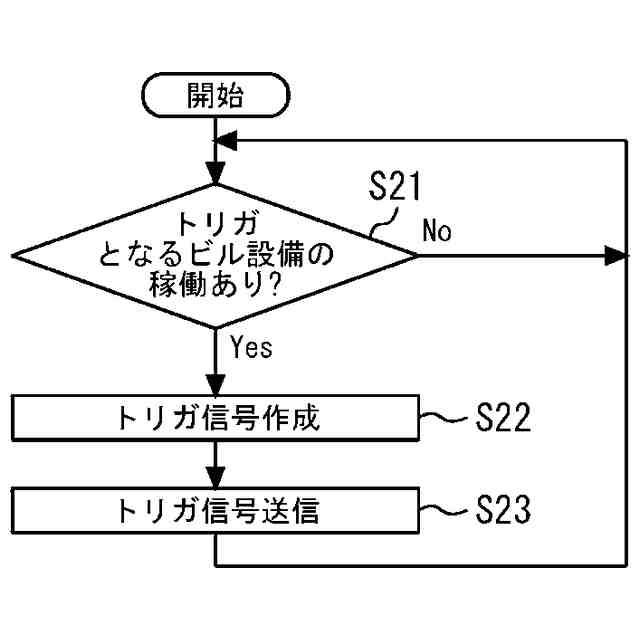
実施の形態1におけるトリガ信号の送信制御を示すフローチャートである。
実施の形態1における異常検知の制御を示すフローチャートである。
実施の形態1における異常判定データベースの一例を示す図である。
実施の形態2における異常検知システムの構成図である。
実施の形態2における反映率の一例を示す図である。
実施の形態2における前回の正常判定時の電波強度変化の一例を示す図である。
実施の形態2における異常検知の制御を示すフローチャートである。
実施の形態2における異常動作発生信号の送信制御を示すフローチャートである。
実施の形態2における異常動作発生信号の受信処理及び異常判定データベースの更新処理を示すフローチャートである。
実施の形態2における更新後の基準値の算出処理を示すフローチャートである。
実施の形態3におけるビルサーバの構成図である。
実施の形態3における異常検知の制御を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
3か月前
株式会社カネカ
製造システム
25日前
株式会社ダイヘン
移動体
3か月前
オムロン株式会社
スレーブ装置
1日前
株式会社FUJI
加工機械ライン
2か月前
愛知製鋼株式会社
車両用システム
1か月前
ローム株式会社
基準電圧源
22日前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
ローム株式会社
半導体集積回路
3か月前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
29日前
株式会社ダイフク
搬送設備
11日前
トヨタ自動車株式会社
生産管理システム
2か月前
三栄ハイテックス株式会社
基準電圧回路
3か月前
株式会社オプトン
制御プログラム生成装置
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社鷺宮製作所
制御装置
3か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社ダイフク
物品搬送設備
3か月前
トヨタ自動車株式会社
クラッチペダル
1か月前
株式会社ダイフク
物品搬送設備
2か月前
キヤノン株式会社
配送システム
25日前
トヨタ自動車株式会社
制御装置
1日前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイヘン
負荷時タップ切換器
3か月前
マーク ヘイリー
消防ロボット
2か月前
株式会社ダイフク
物品搬送設備
11日前
株式会社ダイフク
物品搬送設備
3か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
株式会社CAOS
移動体の制御システム
21日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ