TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025139443
公報種別
公開特許公報(A)
公開日
2025-09-26
出願番号
2024038381
出願日
2024-03-12
発明の名称
位置および力制御装置
出願人
東急建設株式会社
,
国立大学法人横浜国立大学
代理人
弁護士法人クレオ国際法律特許事務所
主分類
G05D
3/12 20060101AFI20250918BHJP(制御;調整)
要約
【課題】 制御対象の物体との接触に許容される接触力の制限値が小さいとき、位置指令値と位置応答値の誤差が大きいときにも、位置追従性能の劣化を防げる位置および力制御装置を提供する。
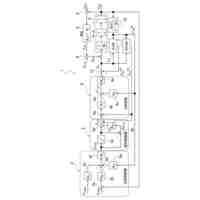
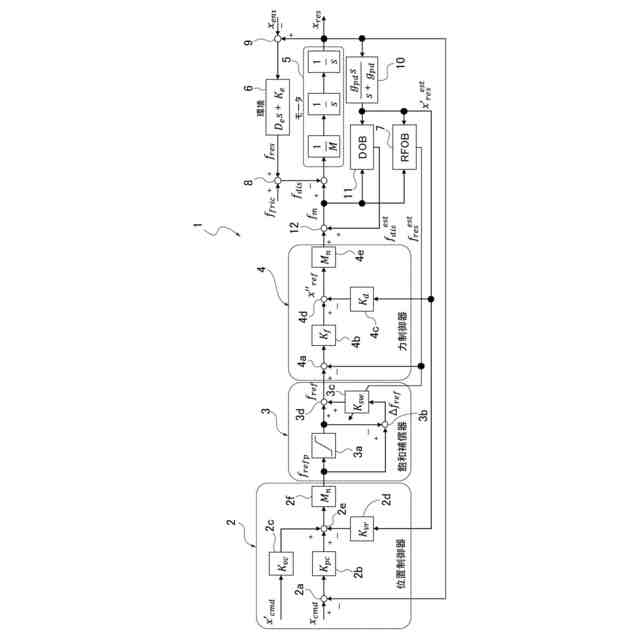
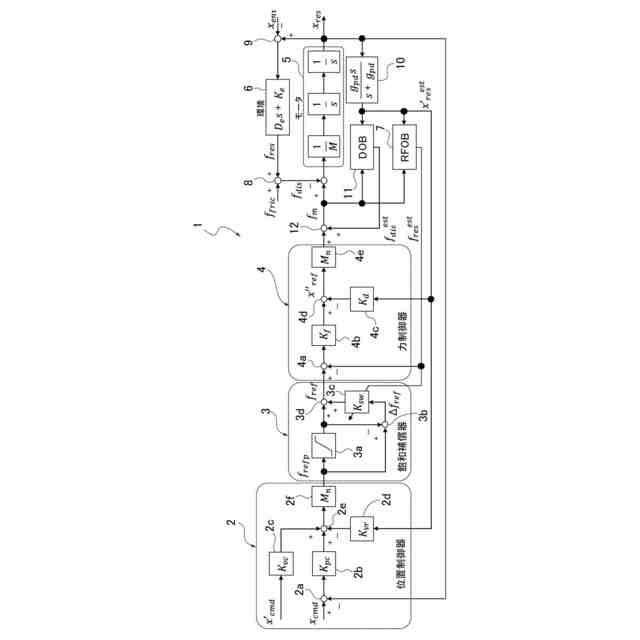
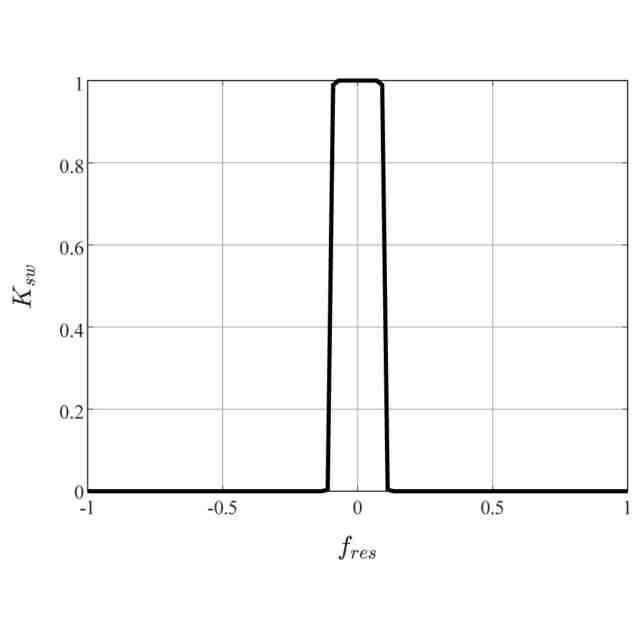
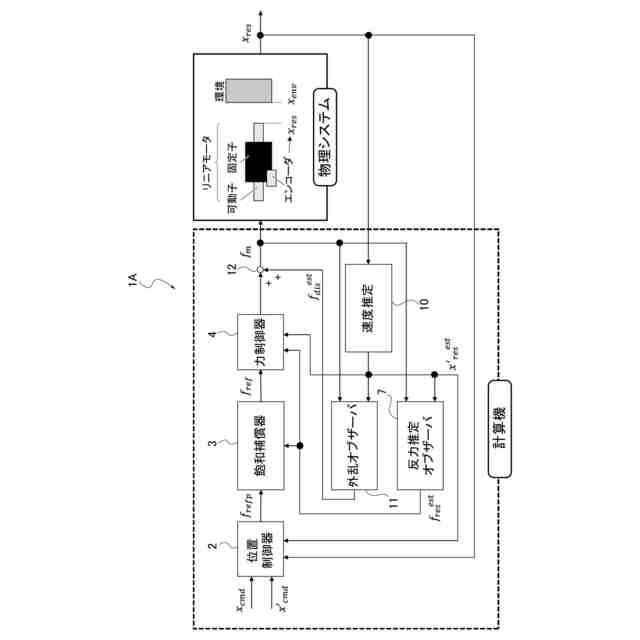
【解決手段】 位置および力制御装置1は位置制御器2と飽和補償器3と力制御器4を備える。飽和補償器3は、制御対象が環境6に接触し(K
sw
=0)、制御対象が環境6に接触する接触力の許容可能な上限値(f
cmd
)または下限値(-f
cmd
)が力参照値f
refp
以下または以上のときには、力参照値を上限値または下限値に制限した制限値を力要求値f
ref
として出力する。また、制御対象が環境6に接触し(K
sw
=0)、かつ、上限値または下限値を力参照値が超えないまたは下回らないとき、並びに、制御対象が環境6に接触していないとき(K
sw
=1)には、力参照値を力要求値として出力する。
【選択図】 図1
特許請求の範囲
【請求項1】
制御対象の目標位置または軌道を表す位置指令値と、当該位置指令値に応じて駆動源が発生した駆動力による前記制御対象の位置応答値との比較結果に基づいて、前記位置指令値に前記位置応答値が追従するために前記駆動源が出力すべき力参照値を計算する位置制御器と、
前記制御対象が前記制御対象以外の物体に接触し、かつ、前記制御対象が前記物体に接触する接触力の許容可能な上限値または下限値が前記力参照値以下または以上のときには、前記力参照値を前記上限値または下限値に制限した制限値を力要求値として出力し、前記制御対象が前記物体に接触し、かつ、前記上限値または下限値を前記力参照値が超えないまたは下回らないとき、並びに、前記制御対象が前記物体に接触していないときには、前記力参照値を前記力要求値として出力する飽和補償器と、
前記制御対象が前記物体に接触し、前記飽和補償器から前記制限値を入力したときには、前記制御対象が前記物体に前記制限値で接触して前記物体から前記制御対象に反力として加わる力応答値と前記制限値との比較結果に基づいて、前記制御対象が前記物体に前記制限値で接触する力制御を行い、前記制御対象が前記物体に接触し、前記飽和補償器から前記力参照値を前記力要求値として入力したときには、前記制御対象が前記物体に前記力参照値で接触して前記物体から前記制御対象に反力として加わる力応答値と前記力参照値との比較結果に基づいて、前記制御対象が前記物体に前記制限値以下の接触力で接触する力制御を行い、前記制御対象が前記物体に接触しておらず、前記飽和補償器から前記力参照値を前記力要求値として入力したときには、前記位置指令値と前記位置応答値との比較結果に基づいて、前記位置応答値が前記位置指令値に追従する位置制御を行わせる力制御器と
を備える位置および力制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記飽和補償器は、
前記上限値または下限値が前記力参照値以下または以上のときには前記力参照値を前記制限値に制限して出力し、前記上限値または下限値を前記力参照値が超えないまたは下回らないときには前記力参照値を出力する飽和関数要素と、
前記力参照値と前記飽和関数要素の出力値との差分を演算する差分演算要素と、
前記制御対象が前記物体に接触しているときに0、接触していないときに1の値になる切換ゲインと前記差分とを乗算して乗算結果を出力する可変演算要素と、
前記飽和関数要素の出力値と前記乗算結果とを加算して加算結果を前記力要求値として出力する加算要素と
から構成されることを特徴とする請求項1に記載の位置および力制御装置。
【請求項3】
前記駆動源はアクチュエータであり、
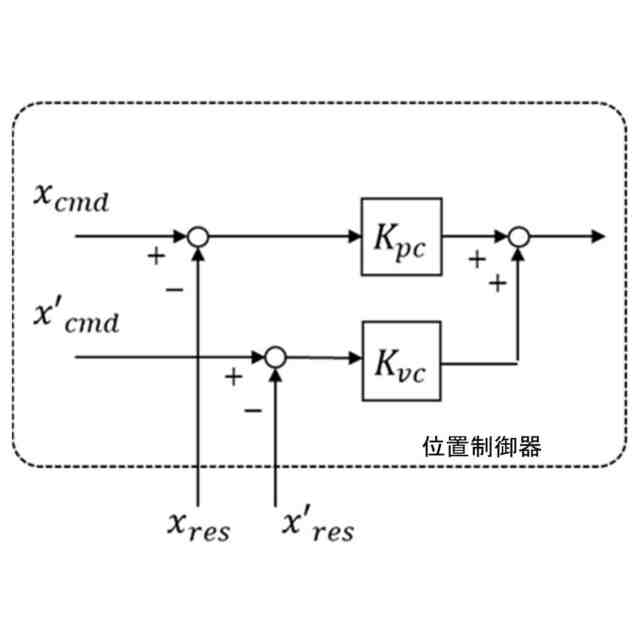
前記位置制御器は、前記位置指令値と前記位置応答値との差分を位置誤差として演算する位置誤差演算要素と、前記位置誤差に所定の制御ゲインを乗算して位置誤差比例値を演算する位置誤差比例値演算要素と、前記制御対象の目標速度を表す速度指令値に所定の制御ゲインを乗算して速度指令比例値を演算する速度指令比例値演算要素と、前記速度指令値に応じて前記アクチュエータが発生した駆動力による前記制御対象の速度応答値に所定の第1制御ゲインを乗算した第1速度応答比例値を演算する第1速度応答比例値演算要素と、前記速度指令比例値と前記第1速度応答比例値との差分に前記位置誤差比例値を加算して位置速度重畳誤差を演算する重畳誤差演算要素と、前記位置速度重畳誤差に前記アクチュエータの公称慣性値を乗算して前記力参照値を演算する力参照値演算要素とから構成され、
前記力制御器は、前記飽和補償器から出力される前記力要求値と当該前記力要求値に応じた前記力応答値との差分を力誤差として演算する力誤差演算要素と、前記力誤差に所定の制御ゲインを乗算して力誤差比例値を演算する力誤差比例値演算要素と、所定の第2制御ゲインを前記速度応答値に乗算して、第2速度応答比例値を演算する第2速度応答比例値演算要素と、前記力誤差比例値と前記第2速度応答比例値との差分を加速度参照値として演算する加速度参照値演算要素と、前記加速度参照値に前記アクチュエータの公称慣性値を乗算して前記アクチュエータへの力制御器出力を演算する力制御器出力演算要素とから構成される
ことを特徴とする請求項2に記載の位置および力制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御対象の位置と制御対象から物体へ及ぼす力を制御する制御装置に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、この種の制御装置としては、例えば、特許文献1に開示されたロボットのコンプライアンス制御装置がある。
【0003】
このコンプライアンス制御装置では、仮想バネによって接触対象物へ加わる力の大きさに制限値を設定する手段と、その制限値によって決定される仮想バネ力の飽和特性に基づいて、ロボットの制御位置を計算する手段とを備える。これら手段により、ロボットが障害物等に接触して目標位置と現在位置とが大幅に異なるような状況になった場合、過大な力が発生されなくなり、ロボットの発生する力は常にある制限値以下に抑えられる。
【先行技術文献】
【特許文献】
【0004】
特許第3466223号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来の特許文献1に開示されたコンプライアンス制御装置では、仮想バネ力に設定される制限値が小さいとき、または、目標位置と現在位置との差が大きいとき、ロボットの発生する力が常に制限値以下に抑えられてしまう。このため、上記従来のコンプライアンス制御装置では、このようなとき、ロボットが障害物等に接触していなくても、仮想バネ力が飽和してしまう。その結果、ロボットの目標位置への位置追従が迅速に行われず、位置追従性能が劣化する。
【課題を解決するための手段】
【0006】
本発明はこのような課題を解決するためになされたもので、
制御対象の目標位置または軌道を表す位置指令値と、当該位置指令値に応じて駆動源が発生した駆動力による制御対象の位置応答値との比較結果に基づいて、位置指令値に位置応答値が追従するために駆動源が出力すべき力参照値を計算する位置制御器と、
制御対象が制御対象以外の物体に接触し、かつ、制御対象が前記物体に接触する接触力の許容可能な上限値または下限値が力参照値以下または以上のときには、力参照値を前記上限値または下限値に制限した制限値を力要求値として出力し、制御対象が前記物体に接触し、かつ、前記上限値または下限値を力参照値が超えないまたは下回らないとき、並びに、制御対象が前記物体に接触していないときには、力参照値を力要求値として出力する飽和補償器と、
制御対象が前記物体に接触し、飽和補償器から制限値を力要求値として入力したときには、制御対象が前記物体に制限値で接触して前記物体から制御対象に反力として加わる力応答値と制限値との比較結果に基づいて、制御対象が前記物体に制限値で接触する力制御を行い、制御対象が前記物体に接触し、飽和補償器から力参照値を力要求値として入力したときには、制御対象が前記物体に力参照値で接触して前記物体から制御対象に反力として加わる力応答値と力参照値との比較結果に基づいて、制御対象が前記物体に制限値以下の接触力で接触する力制御を行い、制御対象が前記物体に接触しておらず、飽和補償器から力参照値を力要求値として入力したときには、位置指令値と位置応答値との比較結果に基づいて、位置応答値が位置指令値に追従する位置制御を行わせる力制御器と
を備えて、位置および力制御装置を構成した。
【0007】
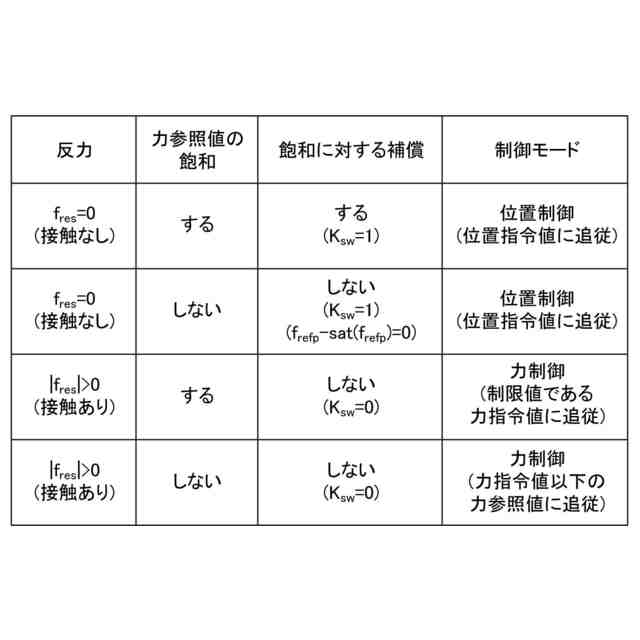
本構成によれば、位置および力制御装置による制御対象の位置制御と力制御とは、制御対象と制御対象以外の物体との接触の有無により、飽和補償器によって自動的に切り替えられる。
【0008】
すなわち、制御対象が前記物体に接触していて、位置制御器から出力される力参照値が前記上限値または下限値の範囲外にあるときには、力参照値が飽和補償器により制限値に制限されて力制御器に入力され、制限値の接触力で制御対象が前記物体に接触する力制御が、力制御器により行われる。また、制御対象が前記物体に接触していて、位置制御器から出力される力参照値が前記上限値または下限値の範囲内にあるときには、制限値よりも小さな値の力参照値が飽和補償器により力要求値として力制御器に入力され、力参照値に応じた接触力で制御対象が前記物体に接触する力制御が、力制御器により行われる。
【0009】
一方、制御対象が前記物体に接触していないときには、位置制御器から出力される力参照値が前記上限値または下限値の範囲外および範囲内のいずれであっても、力参照値が飽和補償器から力制御器へ出力され、位置応答値が位置指令値に追従する位置制御器による位置制御が行われる。
【0010】
したがって、制御対象の前記物体との接触に許容される接触力の上限値または下限値が小さいとき、および、位置指令値と位置応答値の誤差が大きいときにおいて、制御対象が前記物体に接触していない場合には、位置制御器から出力される力参照値が飽和補償器によって制限されることがなく、位置制御器で算出される力参照値に応じて、位置応答値が位置指令値に追従する位置制御が行われる。このため、制御対象の前記物体との接触に許容される接触力の上限値または下限値が小さいとき、および、位置指令値と位置応答値の誤差が大きいときにおいても、制御対象の目標位置または軌道への位置追従が迅速に行われ、位置追従性能の劣化を防ぐことができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
東急建設株式会社
合成壁の設計方法
1か月前
東急建設株式会社
位置および力制御装置
5日前
東急建設株式会社
遮音構造及び遮音構造の施工方法
1か月前
東急建設株式会社
控え杭と緊張材の結合方法及び山留め構造
23日前
東急建設株式会社
トンネル内作業方法およびトンネル空調システム
9日前
東急建設株式会社
遮音構造の施工方法
26日前
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
3か月前
株式会社カネカ
製造システム
26日前
オムロン株式会社
スレーブ装置
2日前
株式会社FUJI
加工機械ライン
2か月前
愛知製鋼株式会社
車両用システム
1か月前
ローム株式会社
基準電圧源
23日前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
12日前
トヨタ自動車株式会社
移動制御システム
1か月前
トヨタ自動車株式会社
生産管理システム
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社鷺宮製作所
制御装置
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社オプトン
制御プログラム生成装置
3か月前
トヨタ自動車株式会社
クラッチペダル
1か月前
カヤバ株式会社
減圧弁
今日
株式会社ダイフク
物品搬送設備
3か月前
キヤノン株式会社
配送システム
26日前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
12日前
トヨタ自動車株式会社
制御装置
2日前
マーク ヘイリー
消防ロボット
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ