TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142776
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042325
出願日
2024-03-18
発明の名称
車両運転支援装置、車両運転支援方法及び車両運転支援プログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/14 20060101AFI20250924BHJP(車両一般)
要約
【課題】第2走行制御が実行されているときであっても、自車両の操作者が第1走行制御を開始させることができる車両運転支援装置を提供する。
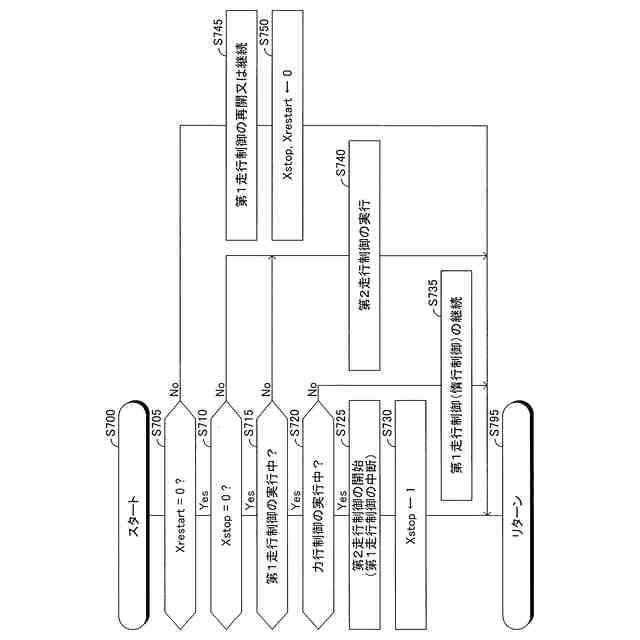
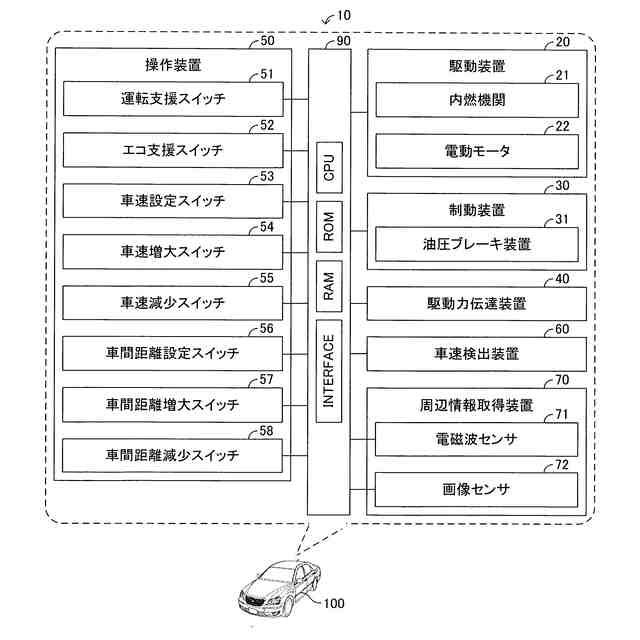
【解決手段】車両運転支援装置10は、自動走行制御として、第1走行制御と第2走行制御とを選択的に実行する。第1走行制御は、自車速が設定車速を含む設定車速範囲内に収まるように又は自車両と先行車との間の車間距離が設定車間距離を含む設定車間距離範囲内に収まるように自車両を力行させる力行制御と自車両を惰行させる惰行制御とを選択的に実行することにより自車両を自律的に走行させる制御である。第2走行制御は、自車速が設定車速に維持されるように又は車間距離が設定車間距離に維持されるように自車両を自律的に走行させる制御である。車両運転支援装置は、第2走行制御の実行中に自車両の操作者により所定操作が行われたとの所定条件が成立した場合、第1走行制御を開始する。
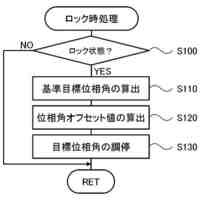
【選択図】 図7
特許請求の範囲
【請求項1】
自車両を自律的に走行させる自動走行制御として、第1走行制御と第2走行制御とを選択的に実行する制御装置を備え、
前記第1走行制御は、前記自車両の車速である自車速が設定車速を含む設定車速範囲内に収まるように又は前記自車両と先行車との間の距離である車間距離が設定車間距離を含む設定車間距離範囲内に収まるように前記自車両を力行させる力行制御と前記自車両を惰行させる惰行制御とを選択的に実行することにより前記自車両を自律的に走行させる制御であり、
前記第2走行制御は、前記自車速が前記設定車速に維持されるように又は前記車間距離が前記設定車間距離に維持されるように前記自車両を自律的に走行させる制御である、
車両運転支援装置において、
前記制御装置は、前記第2走行制御の実行中に前記自車両の操作者により所定操作が行われたとの所定条件が成立した場合、前記第1走行制御を開始するように構成されている、
車両運転支援装置。
続きを表示(約 2,700 文字)
【請求項2】
請求項1に記載の車両運転支援装置において、
前記制御装置は、前記所定条件が成立した場合、前記惰行制御を開始することにより前記第1走行制御を開始するように構成されている、
車両運転支援装置。
【請求項3】
請求項1に記載の車両運転支援装置において、
前記制御装置は、前記第1走行制御の実行中に中断条件が成立した場合、前記第1走行制御を中断して前記第2走行制御を開始するように構成されており、
前記制御装置は、
前記第1走行制御の実行中に前記中断条件が成立した場合において、前記中断条件が成立した時点で前記自車速が前記設定車速よりも小さいとき又は前記車間距離が前記設定車間距離よりも長いときには、前記第1走行制御を中断し、前記自車速が上昇するように又は前記車間距離が短くなるように前記自車両の力行を開始することにより前記第2走行制御を開始し、
前記第1走行制御の実行中に前記中断条件が成立して前記自車両の力行を開始することにより前記第2走行制御を開始した場合において、当該力行を行っている間に前記所定条件が成立したときには、前記惰行制御を開始することにより前記第1走行制御を開始する、
ように構成されている、
車両運転支援装置。
【請求項4】
請求項1に記載の車両運転支援装置において、
前記制御装置は、前記第1走行制御の実行中に中断条件が成立した場合、前記第1走行制御を中断し、前記中断条件が成立した時点の前記自車速を前記設定車速として設定し又は前記第1走行制御を中断した時点の前記車間距離を前記設定車間距離として設定して前記第2走行制御を開始するように構成されている、
車両運転支援装置。
【請求項5】
請求項1又は請求項4に記載の車両運転支援装置において、
前記制御装置は、前記第1走行制御を中断して前記第2走行制御を実行しているときに前記所定条件が成立した場合において、前記第1走行制御を中断する直前に前記力行制御を実行していたときには、前記力行制御を開始することにより前記第1走行制御を開始し、前記第1走行制御を中断する直前に前記惰行制御を実行していたときには、前記惰行制御を開始することにより前記第1走行制御を開始するように構成されている、
車両運転支援装置。
【請求項6】
請求項1又は請求項4に記載の車両運転支援装置において、
前記制御装置は、
前記第1走行制御が前記自車速が前記設定車速範囲内に収まるように前記力行制御と前記惰行制御とを選択的に実行することにより前記自車両を自律的に走行させる制御である場合において、前記所定条件が成立した時点で、前記自車速を前記設定車速範囲の上限値に到達させるまでに要する時間である自車速上限到達時間が前記自車速を前記設定車速範囲の下限値に到達させるまでに要する時間である自車速下限到達時間よりも長いときには、前記力行制御を開始することにより前記第1走行制御を開始し、前記自車速下限到達時間が前記自車速上限到達時間よりも長いときには、前記惰行制御を開始することにより前記第1走行制御を開始し、
前記第1走行制御が前記車間距離が前記設定車間距離範囲内に収まるように前記力行制御と前記惰行制御とを選択的に実行することにより前記自車両を自律的に走行させる制御である場合において、前記所定条件が成立した時点で、前記車間距離を前記設定車間距離範囲の下限値に到達させるまでに要する時間である車間距離下限到達時間が前記車間距離を前記設定車間距離範囲の上限値に到達させるまでに要する時間である車間距離上限到達時間よりも長いときには、前記力行制御を開始することにより前記第1走行制御を開始し、前記車間距離上限到達時間が前記車間距離下限到達時間よりも長いときには、前記惰行制御を開始することにより前記第1走行制御を開始する、
ように構成されている、
車両運転支援装置。
【請求項7】
請求項1又は請求項4に記載の車両運転支援装置において、
前記所定操作は、前記設定車速を高くする操作若しくは低くする操作又は前記設定車間距離を長くする操作若しくは短くする操作であり、
前記制御装置は、
前記第2走行制御の実行中に前記所定操作として前記設定車速を高くする操作又は前記設定車間距離を短くする操作が行われて前記所定条件が成立した場合、前記力行制御を開始することにより前記第1走行制御を開始し、
前記第2走行制御の実行中に前記所定操作として前記設定車速を低くする操作又は前記設定車間距離を長くする操作が行われて前記所定条件が成立した場合、前記惰行制御を開始することにより前記第1走行制御を開始する、
ように構成されている、
車両運転支援装置。
【請求項8】
請求項1に記載の車両運転支援装置において、
前記制御装置は、前記所定条件が成立したときに中断条件が成立している場合、前記第1走行制御を開始しないように構成されている、
車両運転支援装置。
【請求項9】
請求項8に記載の車両運転支援装置において、
前記中断条件は、前記惰行制御の実行を禁止する必要があるとの条件である、
車両運転支援装置。
【請求項10】
請求項1に記載の車両運転支援装置において、
前記制御装置は、前記第1走行制御の実行中に中断条件が成立した場合、前記第1走行制御を中断して前記第2走行制御を開始するように構成されており、
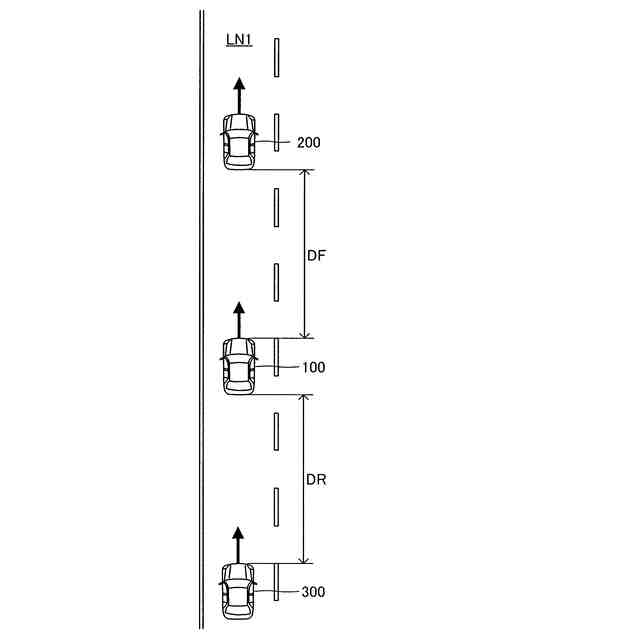
前記中断条件は、前記自車両と後続車との間の距離が第1閾値距離以下であるとの第1中断条件と、前記自車両と前記後続車との間の距離が前記第1閾値距離よりも長い第2閾値距離以下であるが前記第1閾値距離よりも長いとの第2中断条件と、を含んでおり、
前記制御装置は、
前記第2走行制御の実行中に前記第1中断条件が成立している場合、前記所定条件が成立しても、前記第1走行制御を開始せず、
前記第2走行制御の実行中に前記第2中断条件が成立している場合、前記所定条件が成立したときには、前記第1走行制御を開始する、
ように構成されている、
車両運転支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両運転支援装置、車両運転支援方法及び車両運転支援プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
自車両を自律的に走行させる自動走行制御として、自車両の車速(自車速)が設定車速を含む設定車速範囲内に収まるように又は自車両と先行車との間の距離(車間距離)が設定車間距離を含む設定車間距離範囲内に収まるように自車両を力行させる力行制御と自車両を惰行させる惰行制御とを選択的に実行することにより自車両を自律的に走行させる制御(第1走行制御)と、自車速が設定車速に維持されるように又は車間距離が設定車間距離に維持されるように自車両を自律的に走行させる制御(第2走行制御)と、を選択的に実行するように構成された車両運転支援装置が知られている(例えば、特許文献1参照)。又、こうした車両運転支援装置として、自車両に関する種々の事情から、第1走行制御を中断して第2走行制御を実行するように構成された車両運転支援装置も知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-95320号公報
【発明の概要】
【0004】
上述した車両運転支援装置は、当該車両運転支援装置による判断により第1走行制御を中断して第2走行制御を実行するが、自車両の操作者が第1走行制御の中断を望まないこともある。このように自車両の操作者が第1走行制御の中断を望んでいない場合、第2走行制御が実行されているときに自車両の操作者が第1走行制御の開始を望むことがある。
【0005】
本発明の目的は、第2走行制御が実行されているときであっても、自車両の操作者が第1走行制御を開始させることができる車両運転支援装置、車両運転支援方法及び車両運転支援プログラムを提供することにある。
【0006】
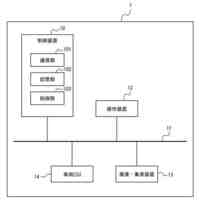
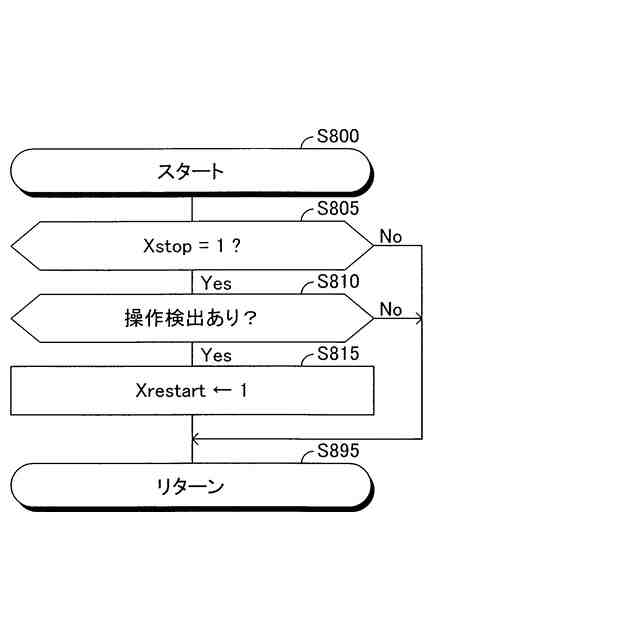
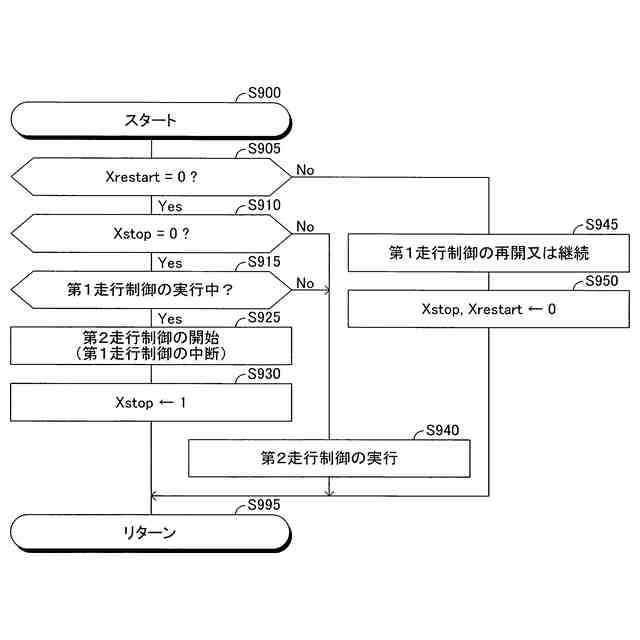
本発明に係る車両運転支援装置は、自車両を自律的に走行させる自動走行制御として、第1走行制御と第2走行制御とを選択的に実行する制御装置を備えている。前記第1走行制御は、前記自車両の車速である自車速が設定車速を含む設定車速範囲内に収まるように又は前記自車両と先行車との間の距離である車間距離が設定車間距離を含む設定車間距離範囲内に収まるように前記自車両を力行させる力行制御と前記自車両を惰行させる惰行制御とを選択的に実行することにより前記自車両を自律的に走行させる制御である。又、前記第2走行制御は、前記自車速が前記設定車速に維持されるように又は前記車間距離が前記設定車間距離に維持されるように前記自車両を自律的に走行させる制御である。そして、前記制御装置は、前記第2走行制御の実行中に前記自車両の操作者により所定操作が行われたとの所定条件が成立した場合、前記第1走行制御を開始するように構成されている。
【0007】
本発明に係る車両運転支援装置によれば、第2走行制御の実行中に自車両の操作者により所定操作が行われると、第1走行制御が開始される。従って、自車両の操作者は、第2走行制御が実行されているときであっても、所定操作を行うことにより、第1走行制御を開始させることができる。
【0008】
尚、本発明に係る車両運転支援装置において、前記制御装置は、前記所定条件が成立した場合、前記惰行制御を開始することにより前記第1走行制御を開始するように構成され得る。
【0009】
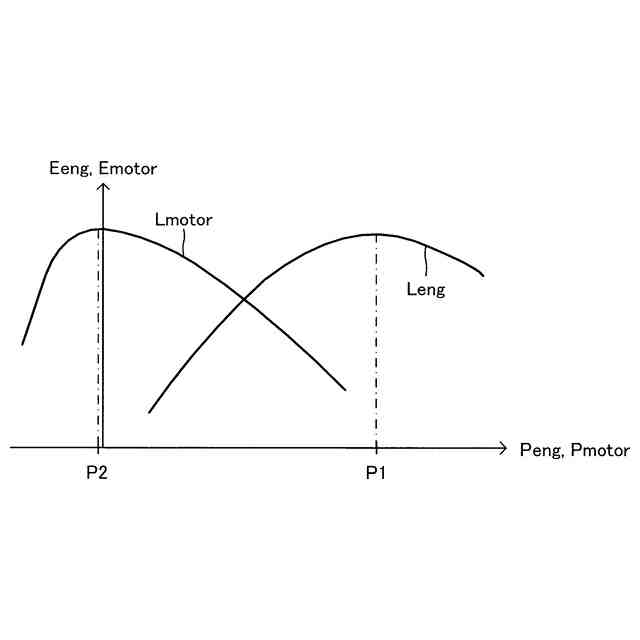
本発明に係る車両運転支援装置によれば、自車両の操作者により所定操作が行われた場合、惰行制御が実行される。このため、自車両の走行に消費されるエネルギー量を少なくすることができる。
【0010】
又、本発明に係る車両運転支援装置において、前記制御装置は、前記第1走行制御の実行中に中断条件が成立した場合、前記第1走行制御を中断して前記第2走行制御を開始するように構成され得る。この場合において、前記制御装置は、前記第1走行制御の実行中に前記中断条件が成立した場合において、前記中断条件が成立した時点で前記自車速が前記設定車速よりも小さいとき又は前記車間距離が前記設定車間距離よりも長いときには、前記第1走行制御を中断し、前記自車速が上昇するように又は前記車間距離が短くなるように前記自車両の力行を開始することにより前記第2走行制御を開始するように構成され得る。更に、この場合において、前記制御装置は、前記第1走行制御の実行中に前記中断条件が成立して前記自車両の力行を開始することにより前記第2走行制御を開始した場合において、当該力行を行っている間に前記所定条件が成立したときには、前記惰行制御を開始することにより前記第1走行制御を開始するように構成され得る。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
電池
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
回転子
14日前
トヨタ自動車株式会社
ロータ
1日前
トヨタ自動車株式会社
サーバ
7日前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
電動車
13日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
冷却構造
6日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
塗布装置
1日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
検査装置
3日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
加熱装置
13日前
トヨタ自動車株式会社
冷却装置
13日前
トヨタ自動車株式会社
駆動装置
21日前
トヨタ自動車株式会社
水系電池
21日前
トヨタ自動車株式会社
蓄電装置
15日前
トヨタ自動車株式会社
表示装置
15日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
制御装置
13日前
トヨタ自動車株式会社
蓄電装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ