TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025153248
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055627
出願日
2024-03-29
発明の名称
ロボットの制御方法及び制御装置
出願人
ニデックインスツルメンツ株式会社
代理人
個人
,
個人
主分類
G05B
11/36 20060101AFI20251002BHJP(制御;調整)
要約
【課題】バックラッシュの影響を除去してロボットを目標位置により正確に移動させる。
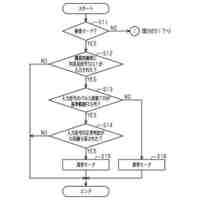
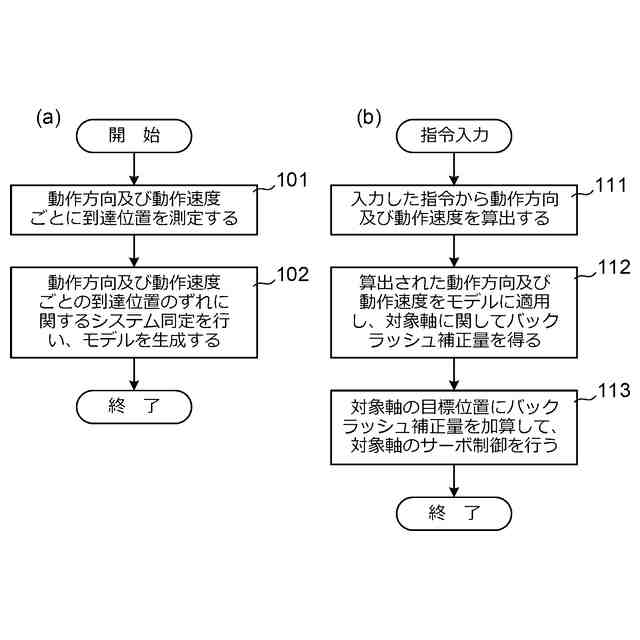
【解決手段】ロボットの軸ごとに動作方向と動作速度とを変えて第1の目標位置に対してロボットを動作させたときの到達位置を測定し(ステップ101)、動作方向と動作速度と第1の目標位置から偏差とに関するシステム同定を行ってモデルを生成する(ステップ102)。ロボットに対する指令が入力したときに、指令から動作方向と動作速度とを算出してモデルに当てはめ、バックラッシュ補正量を取得し(ステップ111)、指令によって指定された目標位置に対しバックラッシュ補正量を加算し(ステップ112)、補正後の目標位置を用いてサーボ制御を実施する(ステップ113)。
【選択図】図4
特許請求の範囲
【請求項1】
各軸のモータがサーボ制御されるロボットの制御方法であって、
軸ごとに動作方向と動作速度とを変えて第1の目標位置に対して前記ロボットを動作させたときの前記ロボットの到達位置を測定し、前記動作方向と前記動作速度と前記第1の目標位置からの前記到達位置の偏差とに関するシステム同定を行ってモデルを生成するモデル生成工程を有する、制御方法。
続きを表示(約 1,100 文字)
【請求項2】
前記ロボットに対する指令が入力したときに、前記指令から前記動作方向と前記動作速度とを算出して前記モデルに当てはめ、バックラッシュ補正量を得る補正量算出工程と、
前記指令によって指定された前記ロボットの目標位置である第2の目標位置に対し前記補正量算出工程で得たバックラッシュ補正量を加算して前記モータに対するサーボ制御を実施するサーボ制御工程と、
を有する、請求項1に記載の制御方法。
【請求項3】
前記モデル生成工程において前記ロボットの軸ごとに前記モデルを生成し、
前記補正量算出工程において前記ロボットの軸ごとに当該軸の前記動作方向と前記動作速度とを算出して当該軸の前記バックラッシュ補正量を得る、請求項2に記載の制御方法。
【請求項4】
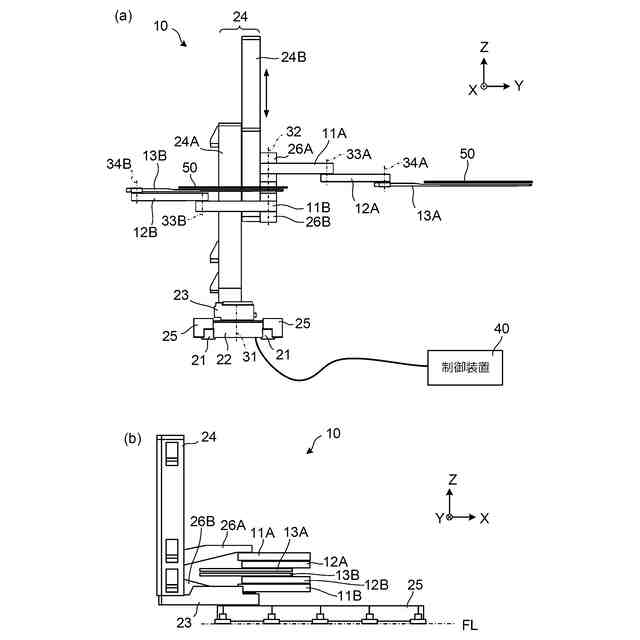
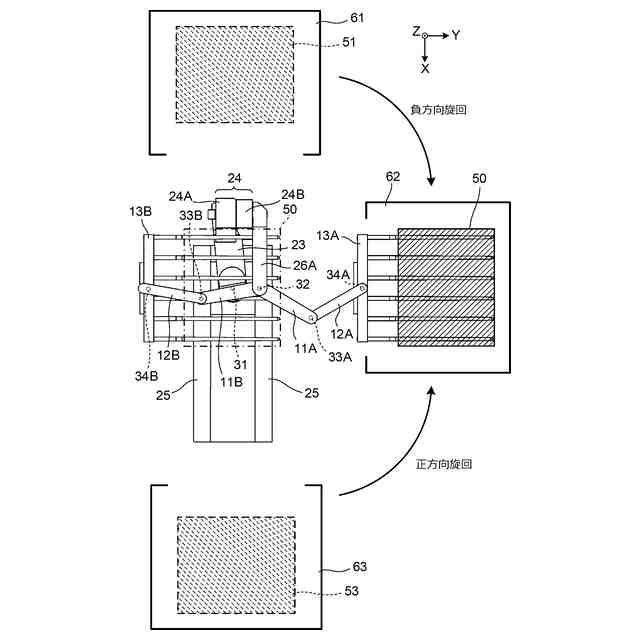
前記ロボットは、ワークを保持するハンドを先端に有する搬送用のロボットである、請求項2または3に記載の制御方法。
【請求項5】
前記ハンドの伸縮に関する軸と前記ハンドの昇降に関する軸とを除いた前記ロボットの各軸に対して前記モデル生成工程と前記補正量算出工程とを実施する、請求項4に記載の制御方法。
【請求項6】
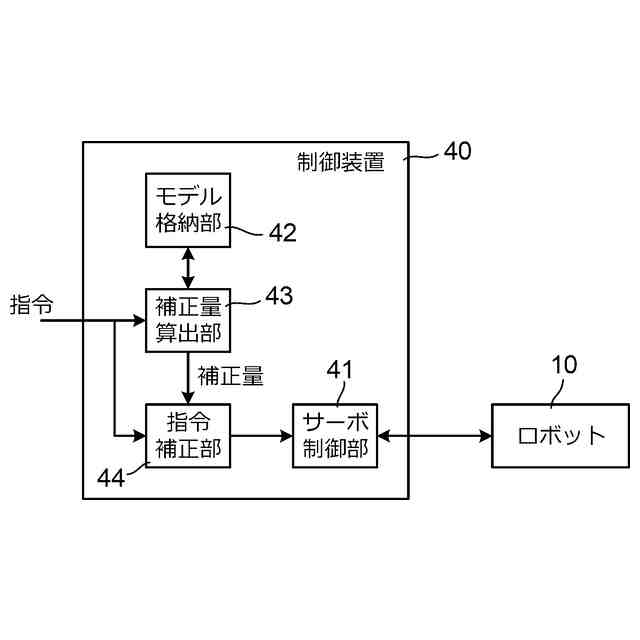
サーボ制御部を備えて指令に基づいてロボットの各軸のモータをサーボ制御する制御装置であって、
前記ロボットの軸ごとの動作方向及び動作速度と第1の目標位置からの前記ロボットの到達位置の偏差とに関するモデルを格納するモデル格納部と、
前記指令から前記動作方向及び前記動作速度を算出し、算出された前記動作方向及び前記動作速度を前記モデルに当てはめてバックラッシュ補正量を得る補正量算出部と、
指令から抽出される第2の目標位置に対して前記バックラッシュ補正量を加算する指令補正部と、を備え
前記サーボ制御部は、前記指令補正部において前記バックラッシュ補正量を加算された前記第2の目標位置に基づいて前記モータのサーボ制御を行う、制御装置。
【請求項7】
前記モデル格納部に、前記ロボットの軸ごとに作成された前記モデルが格納され、
前記補正量算出部は、前記ロボットの軸ごとに前記動作方向及び前記動作速度を算出して当該軸に関する前記バックラッシュ補正量を算出する、請求項6に記載の制御装置。
【請求項8】
前記ロボットは、ワークを保持するハンドを先端に有する搬送用のロボットである、請求項6または7に記載の制御装置。
【請求項9】
前記ハンドの伸縮に関する軸と前記ハンドの昇降に関する軸とを除いた前記ロボットの各軸に関する前記モデルが前記モデル格納部に格納されている、請求項8に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボット(以下、ロボットと称する)の制御に関し、特にロボットにおけるバックラッシュの影響を低減する制御方法及び制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
ロボットの各軸のアームやハンドは、それぞれ、サーボ制御されるモータからギアや減速機を介して駆動される。ギアや減速機ではバックラッシュが発生するが、ハンドによってワークを保持する搬送用のロボットの場合、バックラッシュは、ハンドの位置決め誤差をもたらす。ロボットに位置指令を与えてワークを所望の位置に搬送するためにはハンドを正確に目標位置で停止させる必要があり、そのためには、バックラッシュ量に基づく補正を行う必要がある。バックラッシュの補正方法としては、バックラッシュ補償量を定数として定め、位置指令に対してバックラッシュ補償量を加算して各軸のモータのサーボ制御を行う方法が知られている。
【0003】
より高精度にバックラッシュの補正を行う技術として特許文献1は、先端にレーザー切断装置などを備えてワークの加工を行う垂直多関節型ロボットにおいてモータ反転時のバックラッシュによって移動中のロボットの軌跡に誤差が生じることを防ぐために、モータの反転があったときにステップ状に増加しモータの反転からの経過時間に応じて小さくなる補正量によるバックラッシュ補正を行うともに、モータ反転時のトルクに応じて減速機に生じるねじれの影響も考慮することを開示している。また、バックラッシュの補正に関するものではないが特許文献2は、非線型特性を有する減速機において生ずる回転むらを補償するために、サーボシステムにおいてモータの速度とモータの回転方向と回転むらの変動幅とに対するゲインと位相との関係を予めルールベース化して記憶し、記憶されたデータに基づいてルールベース推論を行って最適なゲイン及び位相を決定し、決定されたゲイン及び位相に基づいて回転むらに対する補償量を決定することを開示している。
【先行技術文献】
【特許文献】
【0004】
国際公開第2020/008751号
特開平4-55915号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明者らの検討の結果によれば、移動中のロボットの軌跡のずれはある程度許容されるものの移動終了時においてロボットのハンドが正確に目標位置に到達することが要求される搬送用のロボットでは、定数であるバックラッシュ補償量を位置指令に加算しただけでは、バックラッシュの影響を十分に除去することができないことが分かった。特許文献1に記載された技術は、ロボットの移動中にロボットの軌跡がずれることを防ぐ技術であって、ロボットが移動を完了したときのバックラッシュの影響を十分には取り除くことができない。また特許文献2に記載された技術は、減速機の軸の回転に伴って周期的に生ずる回転むらの影響を低減する技術であり、バックラッシュの補正には使用することができない。
【0006】
本発明の目的は、バックラッシュの影響を除去してロボットを目標位置により正確に移動させることができる制御方法及び制御装置を提供することにある。
【課題を解決するための手段】
【0007】
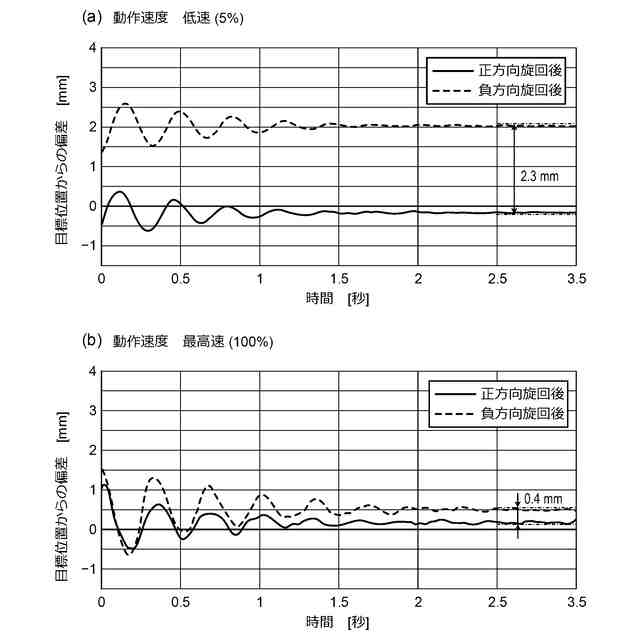
本発明者らは、異なる方向から同一の目標位置に向けてロボットを移動させたときにロボットが到達する位置の差からバックラッシュ量の評価を行ったところ、ロボットの動作速度によってバックラッシュ量が異なることを見出した。動作速度によらずに目標位置にロボットを移動させるためには、ロボットの動作速度に応じてバックラッシュ補正量を変える必要があり、そのようなバックラッシュ補正量を算出できることが必要である。
【0008】
したがって一態様の制御方法は、各軸のモータがサーボ制御されるロボットの制御方法であって、軸ごとに動作方向と動作速度とを変えて第1の目標位置に対してロボットを動作させたときのロボットの到達位置を測定し、動作方向と動作速度と第1の目標位置からの到達位置の偏差とに関するシステム同定を行ってモデルを生成するモデル生成工程を有する。
【0009】
一態様の制御装置は、サーボ制御部を備えて指令に基づいてロボットの各軸のモータをサーボ制御する制御装置であって、ロボットの軸ごとの動作方向及び動作速度と第1の目標位置からのロボットの到達位置の偏差とに関するモデルを格納するモデル格納部と、指令から動作方向及び動作速度を算出し、算出された動作方向及び動作速度をモデルに当てはめてバックラッシュ補正量を得る補正量算出部と、指令から抽出される第2の目標位置に対してバックラッシュ補正量を加算する指令補正部と、を備え、サーボ制御部は、指令補正部においてバックラッシュ補正量を加算された第2の目標位置に基づいてモータのサーボ制御を行う。
【発明の効果】
【0010】
本発明によれば、バックラッシュの影響を除去してロボットを目標位置により正確に移動させることができるようになる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社FUJI
工作機械
4か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社熊谷組
障害物の検出方法
21日前
愛知製鋼株式会社
車両用システム
2か月前
ローム株式会社
基準電圧源
1か月前
株式会社FUJI
加工機械ライン
3か月前
新電元工業株式会社
作業用ロボット
19日前
個人
作業車両自動化システム
2か月前
豊田合成株式会社
機器制御装置
26日前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
株式会社ダイフク
搬送設備
4か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
移動制御システム
2か月前
トヨタ自動車株式会社
減圧弁
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
株式会社オプトン
制御プログラム生成装置
4か月前
株式会社鷺宮製作所
制御装置
4か月前
株式会社ダイフク
物品搬送設備
4か月前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
4か月前
トヨタ自動車株式会社
制御装置
1か月前
カヤバ株式会社
減圧弁
28日前
エイブリック株式会社
電流補償回路及び半導体装置
15日前
株式会社ダイフク
物品搬送設備
今日
キヤノン株式会社
配送システム
1か月前
トヨタ自動車株式会社
クラッチペダル
2か月前
マーク ヘイリー
消防ロボット
3か月前
株式会社TMEIC
安全性診断装置
1か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ